TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042477
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149524
出願日
2023-09-14
発明の名称
経路計画装置、方法、及びプログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
9/22 20060101AFI20250319BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】経路計画を高効率、かつ高い成功率で実行する。
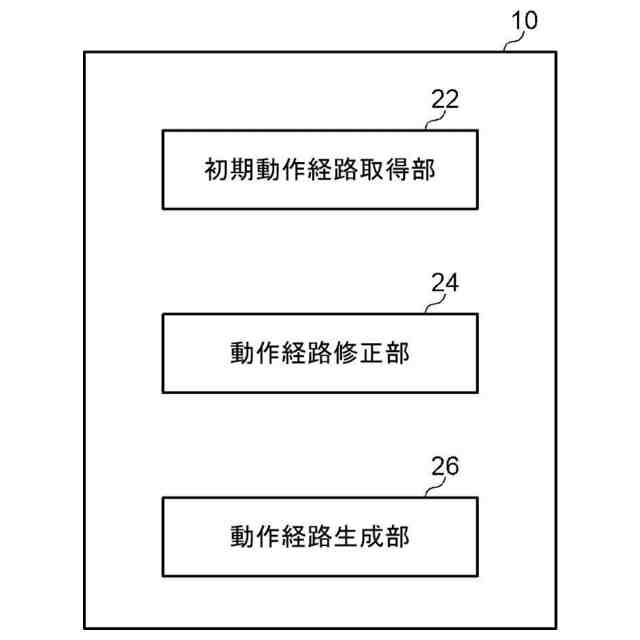
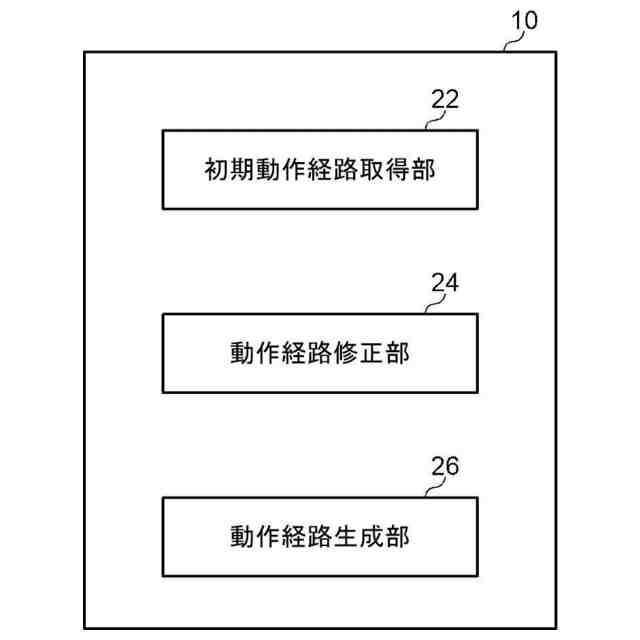
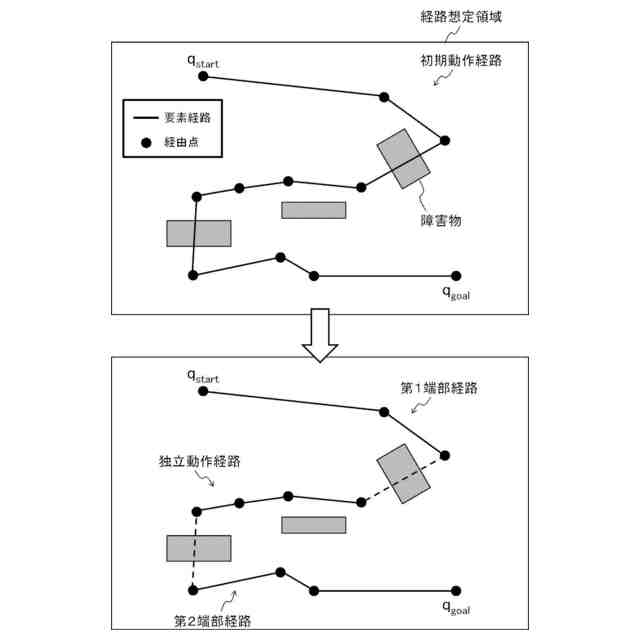
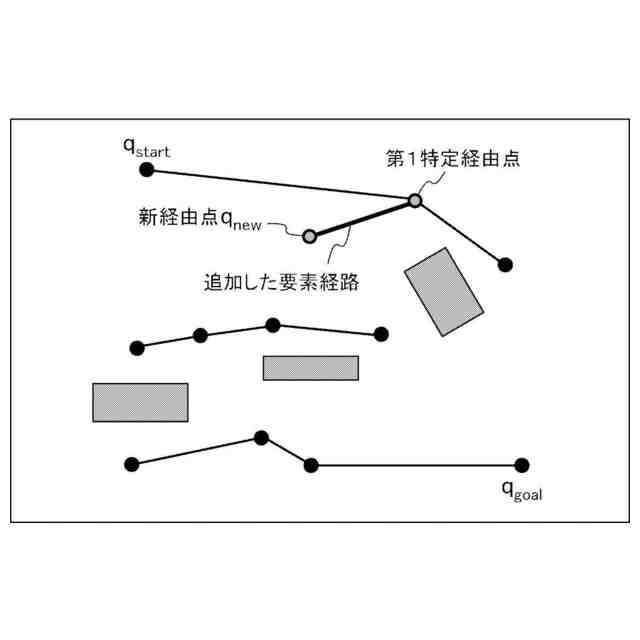
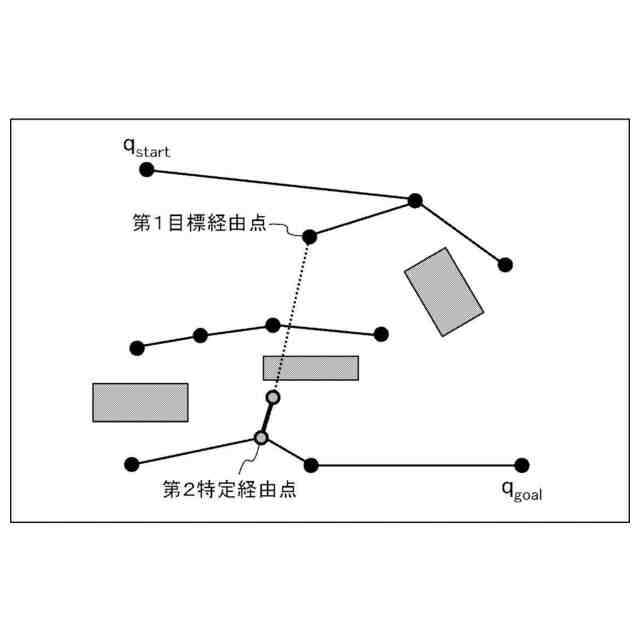
【解決手段】初期動作経路取得部22が、コンフィグレーション空間内の経路想定領域内で初期動作経路を取得し、動作経路修正部24が、初期動作経路内の要素経路のうち、障害物と干渉する要素経路を削除して第1端部経路、第2端部経路、独立動作経路に分断し、動作経路生成部26が、第1端部経路からランダムに選択した第1特定経由点と経路想定領域内にランダムに設定した新経由点とを接続する、障害物と干渉しない要素経路を第1端部経路に追加し、第2端部経路内の新経由点に最も近い第2特定経由点と第1端部経路から選択した第1目標経由点とを接続する、障害物と干渉しない要素経路を追加し、全ての独立動作経路内の新経由点に最も近い第3特定経由点と第1端部経路から選択した第2目標経由点とを接続する、障害物と干渉しない要素経路を追加して動作経路を生成する。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットのコンフィグレーション空間において開始点から終了点に至る前記ロボットの動作経路を計画する経路計画装置であって、
前記コンフィグレーション空間内に経路想定領域を設定し、前記経路想定領域内で前記開始点から複数の要素経路を経て前記終了点に至る初期の動作経路である初期動作経路を取得する初期動作経路取得部と、
前記初期動作経路に含まれる要素経路のいずれかと障害物との干渉が発生した場合に、干渉が発生した要素経路を削除し、要素経路を削除することによって分断された動作経路のうち、前記開始点を含む動作経路、及び前記終了点を含む動作経路のいずれか一方の動作経路を第1端部経路、他方の動作経路を第2端部経路、前記開始点及び前記終了点のいずれも含まない1又は複数の動作経路が存在する場合には当該動作経路を独立動作経路とする動作経路修正部と、
前記第1端部経路に含まれるいずれかの経由点を第1特定経由点としてランダムに選択する第1の処理、
前記経路想定領域内の位置にランダムに新経由点を設定し、前記第1特定経由点と前記新経由点とを接続する要素経路を前記第1端部経路に追加し、追加した要素経路が前記障害物と干渉していたら追加した要素経路を削除して前記第1の処理に戻り、干渉していなかったら追加した要素経路を維持する、第2の処理、
前記第2端部経路に含まれる経由点のうち、前記新経由点に最も近い経由点を第2特定経由点とする第3の処理、
前記第1端部経路に含まれるいずれかの経由点を第1目標経由点として選択し、前記第2特定経由点と前記第1目標経由点とを接続するための1又は複数直列に接続された要素経路を追加し、いずれの追加した要素経路も前記障害物と干渉することなく前記第2特定経由点と前記第1目標経由点とが接続されれば動作経路の生成を終了し、追加した要素経路に前記障害物と干渉する部分があれば少なくとも当該干渉する部分を削除する、第4の処理、
前記独立動作経路が存在していなければ前記第1の処理に戻り、存在していれば存在している全ての前記独立動作経路に含まれる経由点の内、前記新経由点に最も近い経由点を第3特定経由点とし当該経由点が属する独立動作経路を着目経路とする第5の処理、及び、
前記第1端部経路に含まれるいずれかの経由点を第2目標経由点として選択し、前記第3特定経由点と前記第2目標経由点とを接続するための1又は複数直列に接続された要素経路を追加し、いずれの追加した要素経路も前記障害物と干渉することなく前記第3特定経由点と前記第2目標経由点とが接続されれば前記第1の処理に戻り、追加した要素経路に前記障害物と干渉する部分があれば少なくとも当該干渉する部分を削除した上で前記第1の処理に戻る、第6の処理
を実行することにより、動作経路を生成する動作経路生成部と、
を備えた経路計画装置。
続きを表示(約 2,500 文字)
【請求項2】
前記動作経路修正部は、前記開始点を含む動作経路、及び前記終了点を含む動作経路のいずれを前記第1端部経路とするかを選択可能である請求項1に記載の経路計画装置。
【請求項3】
前記動作経路生成部は、前記第4の処理において、前記第1端部経路に含まれる経由点のうち、前記新経由点、又は、前記第2特定経由点に最も近い経由点を前記第1目標経由点として選択する請求項1又は請求項2に記載の経路計画装置。
【請求項4】
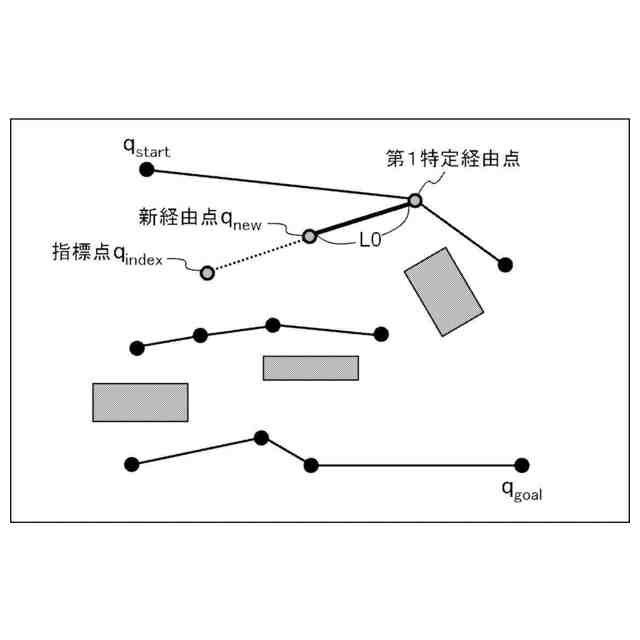
前記動作経路生成部は、前記第4の処理において、前記第2特定経由点と前記第1目標経由点とを接続するための複数直列に接続された要素経路を追加する場合、前記第2特定経由点又は前記第1目標経由点のいずれか一方を延伸元経由点、他方を延伸先経由点とし、前記延伸元経由点から前記延伸先経由点の方向へ第1新経路長の長さの要素経路を追加する処理を前記延伸先経由点までの残りの距離が前記第1新経路長以下となるまで繰り返し、前記追加する処理の繰り返しにおいて、追加した要素経路が前記障害物と干渉する場合には、前記追加した要素経路を削除して前記繰り返しを終了し、前記残りの距離が前記第1新経路長以下の場合、追加済みの要素経路の端点と前記延伸先経由点とを接続する要素経路を追加した上で、追加した要素経路が前記障害物と干渉しない場合には、動作経路の生成を終了し、干渉する場合には、前記追加した要素経路を削除する請求項1又は請求項2に記載の経路計画装置。
【請求項5】
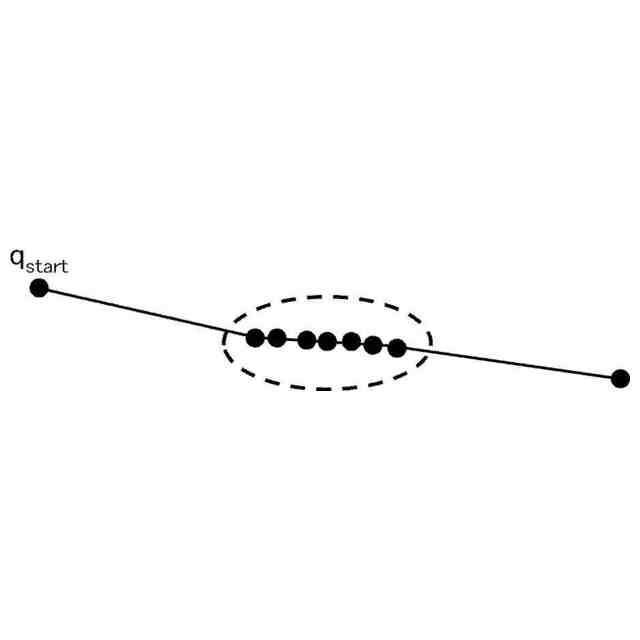
前記動作経路生成部は、前記第4の処理において、前記第2特定経由点と前記第1目標経由点とを接続する1つの要素経路を追加する場合、前記1つの要素経路上に所定間隔毎に干渉判定点を設定し、前記第2特定経由点又は前記第1目標経由点からの距離が近い前記干渉判定点から順に前記障害物と干渉するか否かの判定を繰り返し、干渉しない場合には、動作経路の生成を終了し、干渉する場合には、干渉が発生する干渉判定点の直前の干渉判定点を終端とし、前記1つの要素経路の前記終端から前記第1目標経由点又は第2特定経由点までの部分を削除する請求項1又は請求項2に記載の経路計画装置。
【請求項6】
前記動作経路生成部は、前記第6の処理において、前記第1端部経路に含まれる経由点のうち、前記新経由点、又は、前記第3特定経由点に最も近い経由点を前記第2目標経由点として選択する請求項1又は請求項2に記載の経路計画装置。
【請求項7】
前記動作経路生成部は、前記第6の処理において、前記第3特定経由点と前記第2目標経由点とを接続するための複数直列に接続された要素経路を追加する場合、前記第3特定経由点又は前記第2目標経由点のいずれか一方を延伸元経由点、他方を延伸先経由点とし、前記延伸元経由点から前記延伸先経由点の方向へ第2新経路長の長さの要素経路を追加する処理を前記延伸先経由点までの残りの距離が前記第2新経路長以下となるまで繰り返し、前記追加する処理の繰り返しにおいて、追加した要素経路が前記障害物と干渉する場合には、前記追加した要素経路を削除して前記繰り返しを終了し、前記残りの距離が前記第2新経路長以下の場合、追加済みの要素経路の端点と前記延伸先経由点とを接続する要素経路を追加した上で、追加した要素経路が前記障害物と干渉する場合には、前記第1の処理に戻り、干渉する場合には、追加した要素経路を削除した上で前記第1の処理に戻る請求項1又は請求項2に記載の経路計画装置。
【請求項8】
前記動作経路生成部は、前記第6の処理において、前記第3特定経由点と前記第2目標経由点とを接続する1つの要素経路を追加する場合、前記1つの要素経路上に所定間隔毎に干渉判定点を設定し、前記第3特定経由点又は前記第2目標経由点からの距離が近い前記干渉判定点から順に前記障害物と干渉するか否かの判定を繰り返し、干渉しない場合には、前記第3特定経由点が属する独立動作経路を第1端部経路とした上で第1の処理に戻り、干渉する場合には、干渉が発生する干渉判定点の直前の干渉判定点を終端とし、前記1つの要素経路の前記終端から前記第2目標経由点又は第3特定経由点までの部分を削除した上で前記第1の処理に戻る請求項1又は請求項2に記載の経路計画装置。
【請求項9】
前記要素経路は、2つの端点を接続する単一の経路であり、前記2つの端点のうち、一方の端点が親点、他方の端点が子点の端点属性を有し、
前記初期動作経路取得部は、前記初期動作経路に含まれるそれぞれの経由点を端点とする2つの要素経路のうちの一方の要素経路の端点が親点、他方の要素経路の端点が子点となるように、前記初期動作経路に含まれる要素経路のそれぞれの端点について前記端点属性を設定し、
前記動作経路生成部は、前記第2の処理、前記第4の処理、及び前記第6の処理において、要素経路を追加した際に、1つの経由点において親点の重複が生じた場合には、追加した要素経路ではない方の要素経路の親点と子点とを入れ替え、さらに当該入れ替えによって新たに発生した親点の重複の相手方の要素経路の親点と子点とを入れ替える処理を親点の重複がなくなるまで繰り返し、
さらに、前記第4の処理において動作経路の生成が終了した後に、親点である前記開始点又は前記終了点から、子点である前記開始点又は前記終了点まで接続された複数の要素経路であって、一方の要素経路の子点が他方の要素経路の親点となるように連鎖した複数の要素経路を貫通動作経路として特定する貫通動作経路特定部を含む、
請求項1又は請求項2に記載の経路計画装置。
【請求項10】
前記動作経路生成部は、
前記第2の処理において、追加した要素経路は前記第1特定経由点を子点とし、
前記第4の処理において、追加した要素経路は前記第2特定経由点側を子点とし、
前記第6の処理において、追加した要素経路は前記第3特定経由点側を子点とする、
請求項9に記載の経路計画装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、経路計画装置、経路計画方法、及び経路計画プログラムに関する。
続きを表示(約 4,600 文字)
【背景技術】
【0002】
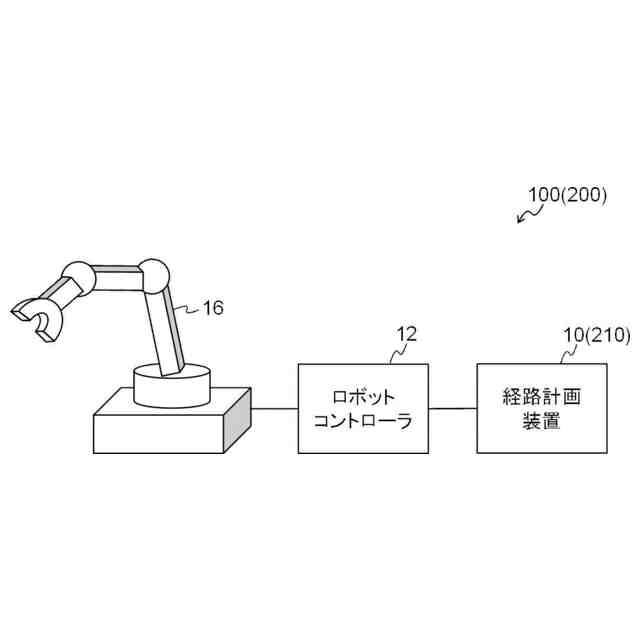
従来、ロボットの所定位置、例えば、アームロボットのハンドの位置等の動作経路を計画する際、アームの各関節の角度を要素とする多次元空間(コンフィグレーション空間)において、ロボットが障害物との干渉を回避しながら動作する経路を計画する技術が提案されている。
【0003】
例えば、作業者の熟練度によらず、ロボットの現実的な干渉回避経路を自動的に生成するロボットシミュレーション装置が提案されている。この装置は、ロボットの動作プログラムのシミュレーションを実行して、第1の動作経路を取得し、第1の動作経路における干渉を検出して、該干渉が発生する前後の教示点である第1の教示点及び第2の教示点を特定する。また、この装置は、第1及び第2の教示点の間に、乱数で定めた探索方向及び探索距離に基づき少なくとも1つの第3の教示点を自動的に挿入し、干渉が発生しない第2の動作経路を生成する。そして、この装置は、第2の動作経路の各々について、予め定めた少なくとも1つのパラメータに基づく評価を行い、複数の第2の動作経路から最適動作経路を選択する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2015-160277号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
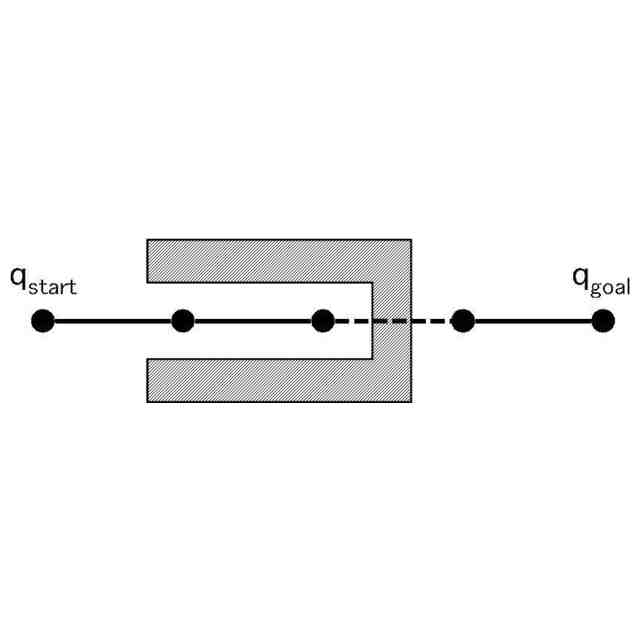
特許文献1に記載のロボットシミュレーション装置は、初期の動作経路である第1の動作経路の障害物との干渉箇所の前後の教示点同士、すなわち干渉箇所によって分断された経路の端点同士を改めて接続することで、動作経路を生成している。
【0006】
しかし、この方法では、干渉を起こしていない経路ごと削除してしまい、非効率な経路生成が行われる場合がある。また、分断された経路の端点が障害物で囲まれ、いわゆる袋小路となっている場合には、経路生成に失敗する可能性がある。
【0007】
本発明は、上記の点に鑑みてなされたものであり、経路計画を高効率、かつ高い成功率で実行することを目的とする。
【課題を解決するための手段】
【0008】
第1態様に係る経路計画装置は、ロボットのコンフィグレーション空間において開始点から終了点に至る前記ロボットの動作経路を計画する経路計画装置であって、前記コンフィグレーション空間内に経路想定領域を設定し、前記経路想定領域内で前記開始点から複数の要素経路を経て前記終了点に至る初期の動作経路である初期動作経路を取得する初期動作経路取得部と、前記初期動作経路に含まれる要素経路のいずれかと障害物との干渉が発生した場合に、干渉が発生した要素経路を削除し、要素経路を削除することによって分断された動作経路のうち、前記開始点を含む動作経路、及び前記終了点を含む動作経路のいずれか一方の動作経路を第1端部経路、他方の動作経路を第2端部経路、前記開始点及び前記終了点のいずれも含まない1又は複数の動作経路が存在する場合には当該動作経路を独立動作経路とする動作経路修正部と、前記第1端部経路に含まれるいずれかの経由点を第1特定経由点としてランダムに選択する第1の処理、前記経路想定領域内の位置にランダムに新経由点を設定し、前記第1特定経由点と前記新経由点とを接続する要素経路を前記第1端部経路に追加し、追加した要素経路が前記障害物と干渉していたら追加した要素経路を削除して前記第1の処理に戻り、干渉していなかったら追加した要素経路を維持する、第2の処理、前記第2端部経路に含まれる経由点のうち、前記新経由点に最も近い経由点を第2特定経由点とする第3の処理、前記第1端部経路に含まれるいずれかの経由点を第1目標経由点として選択し、前記第2特定経由点と前記第1目標経由点とを接続するための1又は複数直列に接続された要素経路を追加し、いずれの追加した要素経路も前記障害物と干渉することなく前記第2特定経由点と前記第1目標経由点とが接続されれば動作経路の生成を終了し、追加した要素経路に前記障害物と干渉する部分があれば少なくとも当該干渉する部分を削除する、第4の処理、前記独立動作経路が存在していなければ前記第1の処理に戻り、存在していれば存在している全ての前記独立動作経路に含まれる経由点の内、前記新経由点に最も近い経由点を第3特定経由点とし当該経由点が属する独立動作経路を着目経路とする第5の処理、及び、前記第1端部経路に含まれるいずれかの経由点を第2目標経由点として選択し、前記第3特定経由点と前記第2目標経由点とを接続するための1又は複数直列に接続された要素経路を追加し、いずれの追加した要素経路も前記障害物と干渉することなく前記第3特定経由点と前記第2目標経由点とが接続されれば前記第1の処理に戻り、追加した要素経路に前記障害物と干渉する部分があれば少なくとも当該干渉する部分を削除した上で前記第1の処理に戻る、第6の処理を実行することにより動作経路を生成する動作経路生成部と、を含んで構成される。
【0009】
第2態様に係る経路計画方法は、ロボットのコンフィグレーション空間において開始点から終了点に至る前記ロボットの動作経路を計画する経路計画装置が実行する経路計画方法であって、初期動作経路取得部が、前記コンフィグレーション空間内に経路想定領域を設定し、前記経路想定領域内で、前記開始点から複数の要素経路を経て前記終了点に至る初期の動作経路である初期動作経路を取得し、動作経路修正部が、前記初期動作経路に含まれる要素経路のいずれかと障害物との干渉が発生した場合に、干渉が発生した要素経路を削除し、要素経理を削除することによって分断された動作経路のうち、前記開始点を含む動作経路、及び前記終了点を含む動作経路のいずれか一方の動作経路を第1端部経路、他方の動作経路を第2端部経路、前記開始点及び前記終了点のいずれも含まない1又は複数の動作経路が存在する場合には当該動作経路を独立動作経路とし、動作経路生成部が、前記第1端部経路に含まれるいずれかの経由点を第1特定経由点としてランダムに選択する第1の処理、前記経路想定領域内の位置にランダムに新経由点を設定し、前記第1特定経由点と前記新経由点とを接続する要素経路を前記第1端部経路に追加し、追加した要素経路が前記障害物と干渉していたら追加した要素経路を削除して前記第1の処理に戻り、干渉していなかったら追加した要素経路を維持する、第2の処理、前記第2端部経路に含まれる経由点のうち、前記新経由点に最も近い経由点を第2特定経由点とする第3の処理、前記第1端部経路に含まれるいずれかの経由点を第1目標経由点として選択し、前記第2特定経由点と前記第1目標経由点とを接続するための1又は複数直列に接続された要素経路を追加し、いずれの追加した要素経路も前記障害物と干渉することなく前記第2特定経由点と前記第1目標経由点とが接続されれば動作経路の生成を終了し、追加した要素経路に前記障害物と干渉する部分があれば少なくとも当該干渉する部分を削除する、第4の処理、前記独立動作経路が存在していなければ前記第1の処理に戻り、存在していれば存在している全ての前記独立動作経路に含まれる経由点の内、前記新経由点に最も近い経由点を第3特定経由点とし当該経由点が属する独立動作経路を着目経路とする第5の処理、及び、前記第1端部経路に含まれるいずれかの経由点を第2目標経由点として選択し、前記第3特定経由点と前記第2目標経由点とを接続するための1又は複数直列に接続された要素経路を追加し、いずれの追加した要素経路も前記障害物と干渉することなく前記第3特定経由点と前記第2目標経由点とが接続されれば前記第1の処理に戻り、追加した要素経路に前記障害物と干渉する部分があれば少なくとも当該干渉する部分を削除した上で前記第1の処理に戻る、第6の処理を実行することにより動作経路を生成する方法である。
【0010】
第3態様に係る経路計画プログラムは、コンピュータを、ロボットのコンフィグレーション空間において開始点から終了点に至る前記ロボットの動作経路を計画する経路計画装置における、前記コンフィグレーション空間内に経路想定領域を設定し、前記経路想定領域内で前記開始点から複数の要素経路を経て前記終了点に至る初期の動作経路である初期動作経路を取得する初期動作経路取得部、前記初期動作経路に含まれる要素経路のいずれかと障害物との干渉が発生した場合に、干渉が発生した要素経路を削除し、要素経路を削除することによって分断された動作経路のうち、前記開始点を含む動作経路、及び前記終了点を含む動作経路のいずれか一方の動作経路を第1端部経路、他方の動作経路を第2端部経路、前記開始点及び前記終了点のいずれも含まない1又は複数の動作経路が存在する場合には当該動作経路を独立動作経路とする動作経路修正部、及び、前記第1端部経路に含まれるいずれかの経由点を第1特定経由点としてランダムに選択する第1の処理、前記経路想定領域内の位置にランダムに新経由点を設定し、前記第1特定経由点と前記新経由点とを接続する要素経路を前記第1端部経路に追加し、追加した要素経路が前記障害物と干渉していたら追加した要素経路を削除して前記第1の処理に戻り、干渉していなかったら追加した要素経路を維持する、第2の処理、前記第2端部経路に含まれる経由点のうち、前記新経由点に最も近い経由点を第2特定経由点とする第3の処理、前記第1端部経路に含まれるいずれかの経由点を第1目標経由点として選択し、前記第2特定経由点と前記第1目標経由点とを接続するための1又は複数直列に接続された要素経路を追加し、いずれの追加した要素経路も前記障害物と干渉することなく前記第2特定経由点と前記第1目標経由点とが接続されれば動作経路の生成を終了し、追加した要素経路に前記障害物と干渉する部分があれば少なくとも当該干渉する部分を削除する、第4の処理、前記独立動作経路が存在していなければ前記第1の処理に戻り、存在していれば存在している全ての前記独立動作経路に含まれる経由点の内、前記新経由点に最も近い経由点を第3特定経由点とし当該経由点が属する独立動作経路を着目経路とする第5の処理、及び、前記第1端部経路に含まれるいずれかの経由点を第2目標経由点として選択し、前記第3特定経由点と前記第2目標経由点とを接続するための1又は複数直列に接続された要素経路を追加し、いずれの追加した要素経路も前記障害物と干渉することなく前記第3特定経由点と前記第2目標経由点とが接続されれば前記第1の処理に戻り、追加した要素経路に前記障害物と干渉する部分があれば少なくとも当該干渉する部分を削除した上で前記第1の処理に戻る、第6の処理を実行することにより動作経路を生成する動作経路生成部、として機能させるためのプログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ