TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044134
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2024126134,2023151782
出願日
2024-08-01,2023-09-19
発明の名称
検出方法
出願人
コネクテッドロボティクス株式会社
代理人
個人
,
個人
主分類
B25J
19/02 20060101AFI20250325BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの処理に関する状況を、より精度高く検出する。
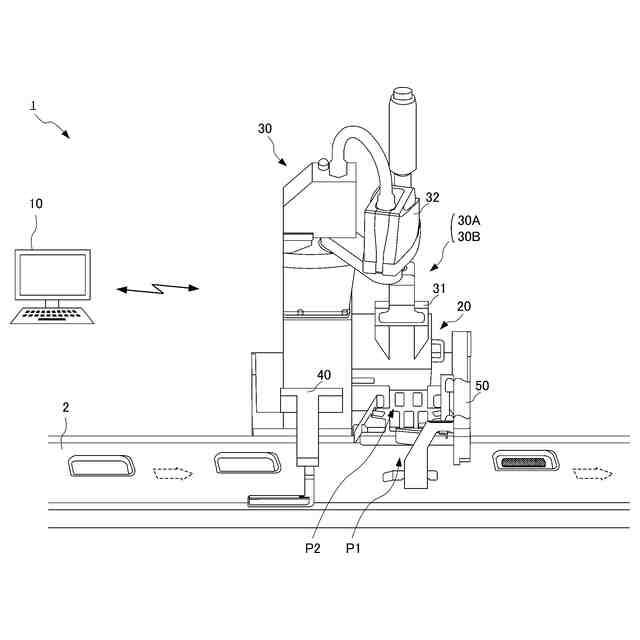
【解決手段】多関節ロボット30と処理用センサ56が行う検出方法である。多関節ロボット30は容器に対して上方の位置から解放物を解放する処理をする。処理用センサ56は容器に対して側方の位置から投光をすることで、解放する処理が完了したか否かを検出する。
【選択図】図11
特許請求の範囲
【請求項1】
ロボットと光センサが行う検出方法であって、
前記ロボットは容器に対して上方の位置から解放物を解放する処理をし、前記光センサは前記容器に対して側方の位置から投光をすることで、前記解放する処理が完了したか否かを検出する、
ことを特徴とする検出方法。
続きを表示(約 880 文字)
【請求項2】
前記光センサは、前記処理が終了して前記容器に前記解放物が解放された場合における、前記解放物の高さの位置に前記投光する光の光路が存在するように配置される、
ことを特徴とする請求項1に記載の検出方法。
【請求項3】
前記ロボットは、前記容器が停止した状態で前記解放する処理を行い、
前記光センサは、前記停止した状態の容器に対して投光をすることで、前記解放する処理が完了したか否かを検出する、
ことを特徴とする請求項1又は2に記載の検出方法。
【請求項4】
前記ロボットは、前記解放物が収容されている収容位置から前記解放物を把持する把持処理を行うと共に、前記解放する処理を行う位置に移動してから、前記把持処理により把持した解放物を前記容器に対して解放する処理を行う、
ことを特徴とする請求項1又は2に記載の検出方法。
【請求項5】
ロボットと光センサと保持部材とが行う検出方法であって、
前記ロボットは容器に対して上方の位置から解放物を解放する処理をし、前記光センサは前記容器に対して側方の位置から投光をすることで、前記解放する処理が完了したか否かを検出し、
前記保持部材は、前記光センサが前記投光する光の光路を遮蔽しないように、その一部が切り抜かれた側壁を有すると共に、前記解放する処理が行われる位置において前記側壁を用いて前記容器を保持する、
ことを特徴とする検出方法。
【請求項6】
ロボットと光センサと移送機構とが行う検出方法であって、
前記ロボットは容器に対して上方の位置から解放物を解放する処理をし、前記光センサは前記容器に対して側方の位置から投光をすることで、前記解放する処理が完了したか否かを検出し、
前記移送機構は、前記光センサが前記解放する処理が完了したことを検出した場合に、前記解放物が解放された容器を前記解放する処理が行われた位置から他の位置に移送する、
ことを特徴とする検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、検出方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、様々な分野において、ロボットの導入が進められている。従来からロボットが用いられている工業製品の製造分野はもちろんのことながら、例えば、食品の盛り付けを行う分野等でもロボットの導入が進められている。
また、このような盛り付けを行うロボットに関する技術の一例が、特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-93948号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているような一般的な技術では、対象物の重量を計測することで、ロボットの処理に関する状況を検出することができる。例えば、盛り付け処理の対象となる容器の重量を計測することで、容器が所定位置に移送されたことや、ロボットによる盛り付け処理が完了したことを検出することができる。
しかしながら、ロボットが落下物の発生する処理を行う場合、対象物の重量に加えて、この落下物の重量も計測することになり、誤検出を引き起こすおそれがある。例えば、引用文献1の技術のように、容器の重量を計測して、容器への食品の盛り付けが完了したか否かを検出する場合に、落下した食品の重量も計測してしまうことで、容器に適正量の食品が盛り付けられていないにも関わらず、適正量が盛り付けられたと誤検出するおそれがある。
【0005】
このような問題は、ロボットの行う処理が食品の盛り付け処理である場合に限られるものではなく、工業製品の製造等のロボットによる様々な処理の全般に共通するものである。
【0006】
本発明の課題は、ロボットの処理に関する状況を、より精度高く検出することである。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一実施形態に係る検出方法は、
ロボットと光センサが行う検出方法であって、
前記ロボットは容器に対して上方の位置から解放物を解放する処理をし、前記光センサは前記容器に対して側方の位置から投光をすることで、前記解放する処理が完了したか否かを検出する、
ことを特徴とする。
【発明の効果】
【0008】
本発明によれば、ロボットの処理に関する状況を、より精度高く検出することができる。
【図面の簡単な説明】
【0009】
本発明に係る把持システム1の構成を模式的に示す模式図である。
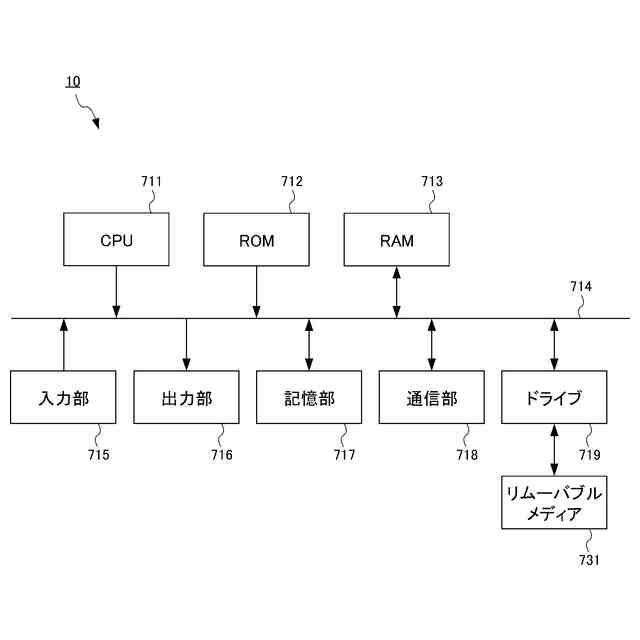
制御装置10のハードウェア構成を示す模式図である。
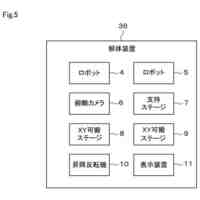
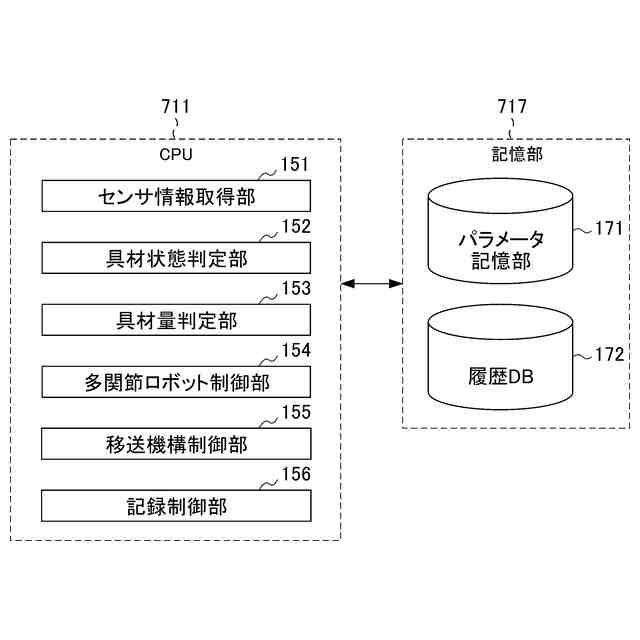
制御装置10の機能的構成を示すブロック図である。
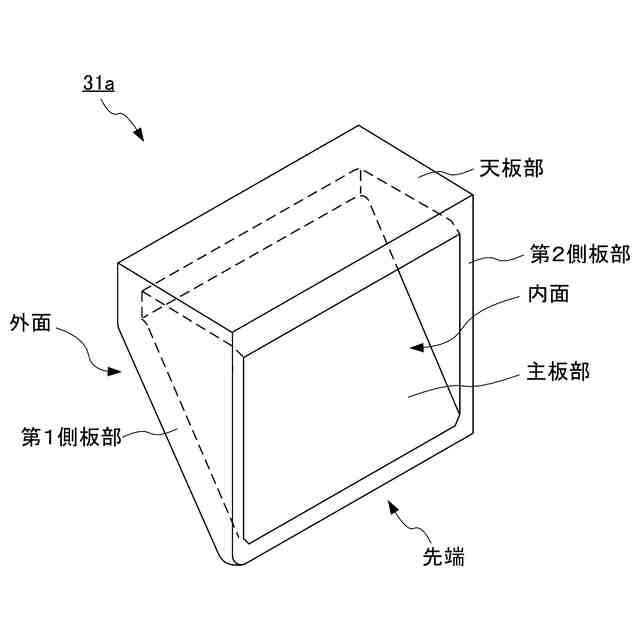
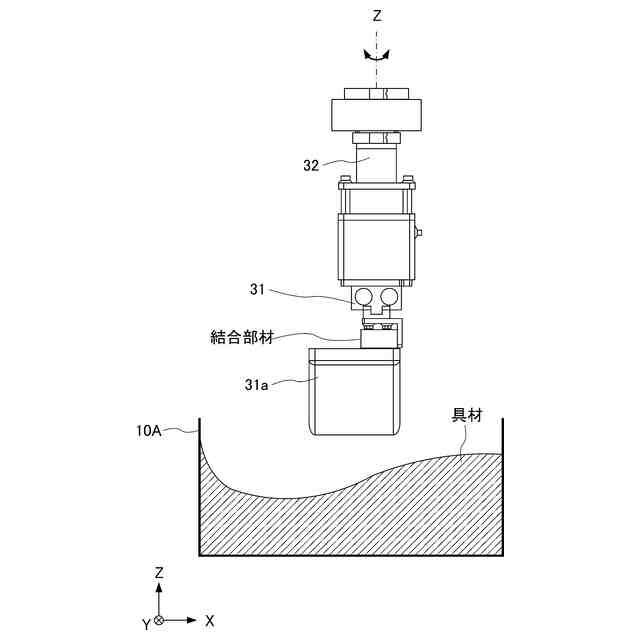
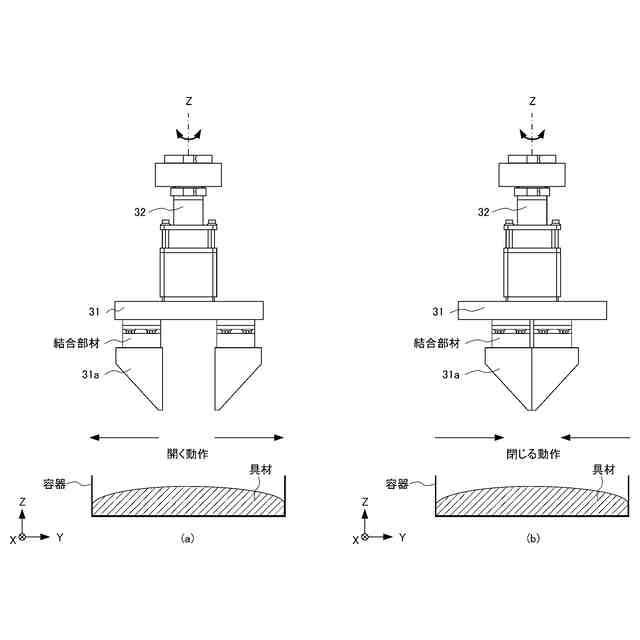
ハンド31の先端に設置される把持部材31aの形状例を示す模式図である。
把持動作等の動作を実行する場合の、具材収容部20の収容空間、ハンド31、把持部材31a、ロボットアーム32、及び具材の位置関係について示す図である。
一対の把持部材31aの開閉について示す図である。
検出部40の近傍を拡大して示す斜視図である。
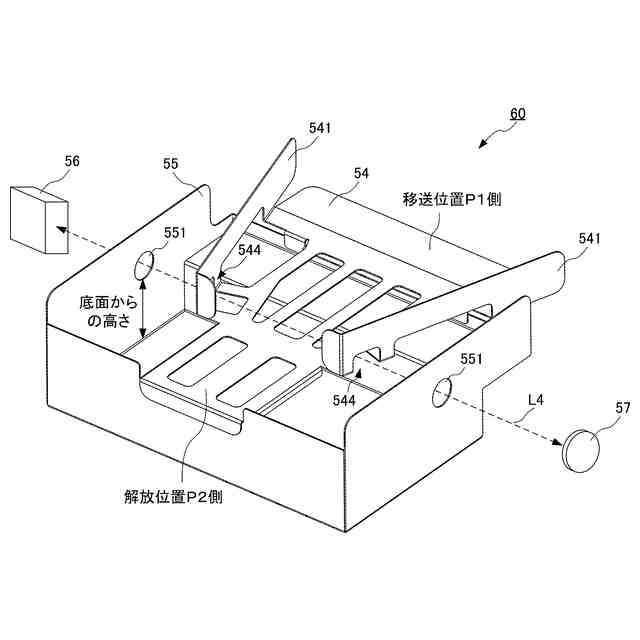
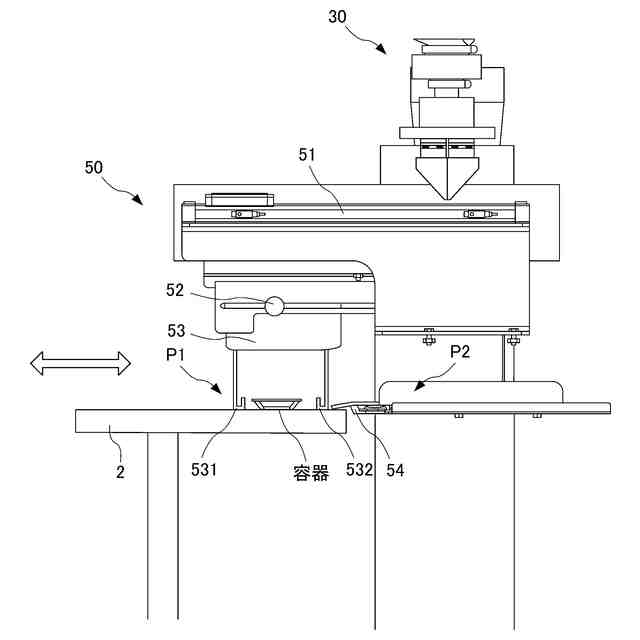
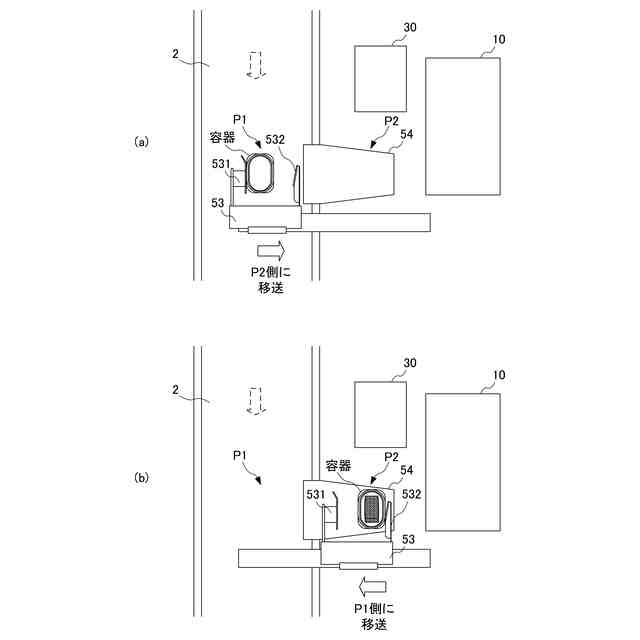
移送位置P1及び解放位置P2の近傍を示す模式図である。
移送位置P1及び解放位置P2の近傍を鉛直上方から俯瞰した図である。
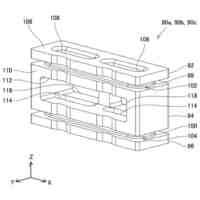
保持部材54の構成を示す斜視図である。
蓄積部55の構成を示す斜視図である。
載置部58の構成を示す斜視図である。
把持システム1が実行する具材盛り付け処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について、図面を参照して説明する。
[実施形態]
[全体構成]
図1は、本発明に係る把持システム1の構成を模式的に示す模式図である。
ここで、把持システム1は、食材を盛り付けるシステムに本発明を適用することを想定したものである。そのため、以下の説明においては、把持システム1が、惣菜等の具材を把持し、この把持した具材を、惣菜の容器に盛り付ける場合を例に挙げて説明する。
ただし、これは説明のための一例に過ぎず、本発明の適用範囲を限定する趣旨ではない。本発明は、ロボットによって処理を行う様々なシステム全般に対して適用可能である。本発明は盛り付けを行うシステムに限らず、例えば、加熱や冷却により調理を行うシステムや、切断や粉砕等により加工をするシステムといった、様々な処理を行うシステムに対して適用することが可能である。また、この場合に、処理の対象も食材や容器には限定されず、例えば、電子機器等の工業製品を対象として処理をするシステムに適用することも可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイセイ
搬送装置
28日前
川崎重工業株式会社
ハンド
22日前
国立大学法人金沢大学
ロボット
1か月前
個人
けがき用治具
16日前
株式会社不二越
ロボット
14日前
個人
深孔スリーブ駆動ロッド構造
6日前
株式会社不二越
ロボット操作装置
13日前
川崎重工業株式会社
ロボット
14日前
株式会社デンソー
操縦桿
14日前
個人
バール
6日前
川崎重工業株式会社
ロボットシステム
22日前
工機ホールディングス株式会社
作業機
1日前
株式会社黒澤鉄工製作所
けがき用治具
16日前
梅馨堂合同会社
人協働ロボットシステム
8日前
アピュアン株式会社
衝撃工具
29日前
ARMA株式会社
UI付エンドエフェクタ
9日前
株式会社不二越
基板搬送用ロボット
23日前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社マキタ
電動工具
28日前
学校法人法政大学
装着型アシスト装置
3日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
若井ホールディングス株式会社
レンチ構造とその製造方法
16日前
株式会社マキタ
作業機
13日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
三菱電機株式会社
トルク締め個所検出システム
6日前
株式会社マキタ
打ち込み工具
28日前
高丸工業株式会社
ロボット操作システムの動作方法
6日前
株式会社不二越
ロボットの教示システム及び教示方法
今日
シブヤパッケージングシステム株式会社
物品移載装置
14日前
中国電力株式会社
電動ドライバー
今日
株式会社デンソー
解体装置および解体プログラム
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ