TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043977
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023151610
出願日
2023-09-19
発明の名称
駆動装置、制御方法、ロボット、プログラム、記録媒体、物品の製造方法
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
17/00 20060101AFI20250325BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数の軸受を介して出力リンクを支持する関節機構において、出力リンクに印加されるトルクを、高い精度で検出できる技術が求められていた。
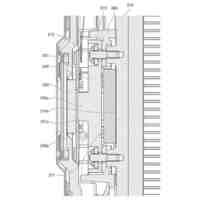
【解決手段】第1のリンクに対して第2のリンクを変位させる駆動装置であって、前記第2のリンクを変位させる駆動力を出力する出力部を備える駆動部と、力に関する情報を取得するセンサと、前記出力部と、前記センサと、を接続するセンサ接続部材と、第1軸受と第2軸受と、を備え、前記センサは前記第2のリンクと接続され、前記第1軸受および前記第2軸受は、前記駆動部から前記第2のリンクまでの力の伝達経路において、前記センサよりも前記駆動部の側に配置されている、ことを特徴とする駆動装置である。
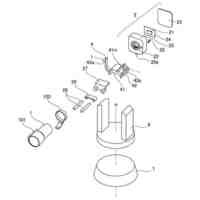
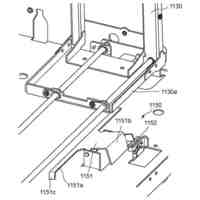
【選択図】図1
特許請求の範囲
【請求項1】
第1のリンクに対して第2のリンクを変位させる駆動装置であって、
前記第2のリンクを変位させる駆動力を出力する出力部を備える駆動部と、
力に関する情報を取得するセンサと、
前記出力部と、前記センサと、を接続するセンサ接続部材と、
第1軸受と第2軸受と、
を備え、
前記センサは前記第2のリンクと接続され、
前記第1軸受および前記第2軸受は、前記駆動部から前記第2のリンクまでの力の伝達経路において、前記センサよりも前記駆動部の側に配置されている、
ことを特徴とする駆動装置。
続きを表示(約 940 文字)
【請求項2】
前記第1軸受は、前記第1のリンクと、前記出力部または前記センサ接続部材と、を支持し、
前記第2軸受は、前記第1のリンクと、前記センサ接続部材と、を支持している、
ことを特徴とする請求項1に記載の駆動装置。
【請求項3】
前記第2のリンクの少なくとも一部は、前記第1軸受と前記第2軸受の間に位置している、
ことを特徴とする請求項1に記載の駆動装置。
【請求項4】
前記駆動部は電動モータを備え、前記第1軸受は、前記電動モータの回転子と前記第1のリンクとを支持している、
ことを特徴とする請求項1乃至3のいずれか1項に記載の駆動装置。
【請求項5】
前記駆動部は減速機を備え、前記第1軸受は、前記減速機の前記出力部と前記第1のリンクとを支持している、
ことを特徴とする請求項1乃至3のいずれか1項に記載の駆動装置。
【請求項6】
前記センサ接続部材は、前記第1のリンクから前記第2のリンクに延在する配線を固定する固定部を備える、
ことを特徴とする請求項1乃至3のいずれか1項に記載の駆動装置。
【請求項7】
前記センサ接続部材は筒状であり、前記第2のリンクの側の固定位置に前記固定部を設け、前記固定部により前記配線を固定する、
ことを特徴とする請求項6に記載の駆動装置。
【請求項8】
前記センサ接続部材と前記第2のリンクの間に設けられたシール部材を備える、
ことを特徴とする請求項1乃至3のいずれか1項に記載の駆動装置。
【請求項9】
前記第1軸受および/または前記第2軸受は、ローラ軸受または玉軸受のいずれかを含む、
ことを特徴とする請求項1乃至3のいずれか1項に記載の駆動装置。
【請求項10】
前記第2のリンクは回転軸を中心に変位し、
前記回転軸の方向に沿って見て、前記第1軸受と前記第2軸受とは距離をおいて配置されている、
ことを特徴とする請求項1乃至3のいずれか1項に記載の駆動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット等で用いられるトルクセンサを備えた駆動装置等に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
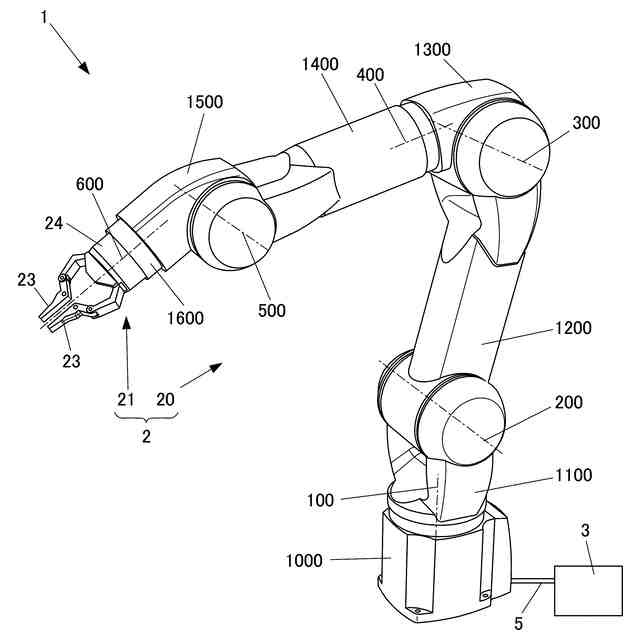
近年、多関節型のロボットマニピュレータの用途が拡大しており、人間との協働作業や、工場内の組み立て作業など、柔軟な動作を行うことが要求される分野への応用が広がっている。このようなロボットには、外力にならうための安定で広帯域な力制御機能が必要とされるため、関節の位置制御(位置サーボ)をベースとした運動制御系に代わり、関節レベルのトルク制御(トルクサーボ)をベースとした制御系を構成することが望ましい。そのため、出力するトルクを正確に検出できる関節機構が求められる。
【0003】
出力トルクの計測機構(トルクセンサ)は、モータや減速機構からなる駆動部の出力側と、出力リンクの間に設置する構成が一般的である。トルクセンサは、印加されるトルクに応じて変形する弾性部材によって構成され、その変形量や歪み量を検出することで、出力トルクを計測する。また、関節の機械的な堅牢性や動作安定性を担保するため、出力リンクを複数の軸受を介して支持することが行われる。
【0004】
特許文献1には、駆動部が出力するトルクを計測するためのトルクセンシング機構を備えた関節機構が記載されている。この関節機構は、基端側リンクである第1リンクと、末梢側リンクである第2リンクを備え、第2リンクは複数の軸受を介して支持されている。
【先行技術文献】
【特許文献】
【0005】
特開2012-242114号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1では、出力リンクである第2リンクは複数の軸受を介して支持されているが、駆動部が出力するトルクを高い精度でトルクセンサが測定できない場合があった。そのため、トルク制御(トルクサーボ)で関節を駆動する際に制御の精度を十分に高めることができず、例えば精密な組み立て作業を遂行するロボットを実現することは困難であった。
そこで、複数の軸受を介して出力リンクを支持する場合において、出力リンクに印加されるトルクを、高い精度で検出できる技術が求められていた。
【課題を解決するための手段】
【0007】
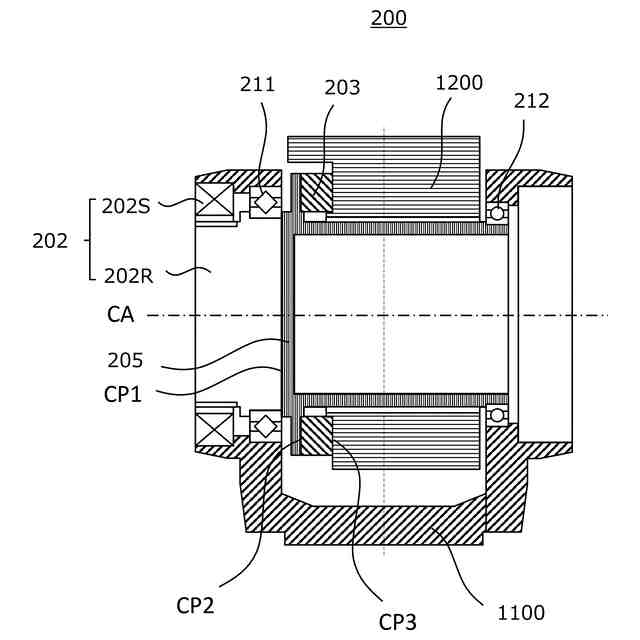
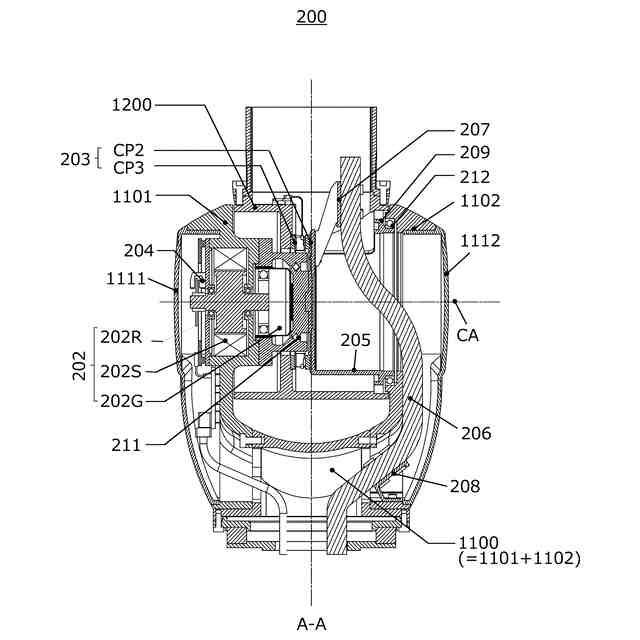
本発明の第1の態様は、第1のリンクに対して第2のリンクを変位させる駆動装置であって、前記第2のリンクを変位させる駆動力を出力する出力部を備える駆動部と、力に関する情報を取得するセンサと、前記出力部と、前記センサと、を接続するセンサ接続部材と、第1軸受と第2軸受と、を備え、前記センサは前記第2のリンクと接続され、前記第1軸受および前記第2軸受は、前記駆動部から前記第2のリンクまでの力の伝達経路において、前記センサよりも前記駆動部の側に配置されている、ことを特徴とする駆動装置である。
【0008】
また、本発明の第2の態様は、第1のリンクに対して第2のリンクを変位させる駆動装置の制御方法であって、前記駆動装置は、前記第2のリンクを変位させる駆動力を出力する出力部を備える駆動部と、力に関する情報を取得するセンサと、前記出力部と、前記センサと、を接続するセンサ接続部材と、第1軸受と第2軸受と、を備え、前記センサは前記第2のリンクと接続され、前記第1軸受および前記第2軸受は、前記駆動部から前記第2のリンクまでの力の伝達経路において、前記センサよりも前記駆動部の側に配置されており、前記センサが取得した力に関する情報に基づいて、制御部が前記駆動部を制御する、ことを特徴とする制御方法である。
【0009】
また、本発明の第3の態様は、第1のリンクに対して第2のリンクを変位させるロボットであって、前記第2のリンクを変位させる駆動力を出力する出力部を備える駆動部と、力に関する情報を取得するセンサと、前記出力部と、前記センサと、を接続するセンサ接続部材と、第1軸受と第2軸受と、を備え、前記センサは前記第2のリンクと接続され、前記第1軸受および前記第2軸受は、前記駆動部から前記第2のリンクまでの力の伝達経路において、前記センサよりも前記駆動部の側に配置されている、ことを特徴とするロボットである。
【0010】
また、本発明の第4の態様は、第1のリンクに対して第2のリンクを変位させるロボットの制御方法であって、前記ロボットは、前記第2のリンクを変位させる駆動力を出力する出力部を備える駆動部と、力に関する情報を取得するセンサと、前記出力部と、前記センサと、を接続するセンサ接続部材と、第1軸受と第2軸受と、を備え、前記センサは前記第2のリンクと接続され、前記第1軸受および前記第2軸受は、前記駆動部から前記第2のリンクまでの力の伝達経路において、前記センサよりも前記駆動部の側に配置されており、前記センサが取得した力に関する情報に基づいて、制御部が前記駆動部を制御する、ことを特徴とする制御方法である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
情報機器
1日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
光学機器
2日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
光電変換装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
情報処理装置
6日前
キヤノン株式会社
シート積載装置
1日前
キヤノン株式会社
冷却装置と電子機器
2日前
キヤノン株式会社
測距装置および機器
1日前
キヤノン株式会社
制御装置および制御方法
6日前
キヤノン株式会社
撮像システム、及び車両
2日前
キヤノン株式会社
レンズ装置および撮像装置
3日前
キヤノン株式会社
ズームレンズ及び撮像装置
3日前
キヤノン株式会社
光電変換装置及び測距装置
1日前
キヤノン株式会社
クラウドプリントサービス
1日前
キヤノン株式会社
TDC装置および測距装置
6日前
キヤノン株式会社
ズームレンズおよび撮像装置
3日前
キヤノン株式会社
ズームレンズおよび撮像装置
6日前
キヤノン株式会社
電源装置および画像形成装置
3日前
キヤノン株式会社
情報提供システムおよび方法
2日前
キヤノン株式会社
画像読取装置、画像形成装置
6日前
キヤノン株式会社
通信装置および通信システム
2日前
キヤノン株式会社
光走査装置及び画像形成装置
1日前
キヤノン株式会社
光走査装置及び画像形成装置
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ