TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025048581
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023157470
出願日
2023-09-22
発明の名称
搬送システム及びプログラム記憶媒体
出願人
三和コンベア株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20250327BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
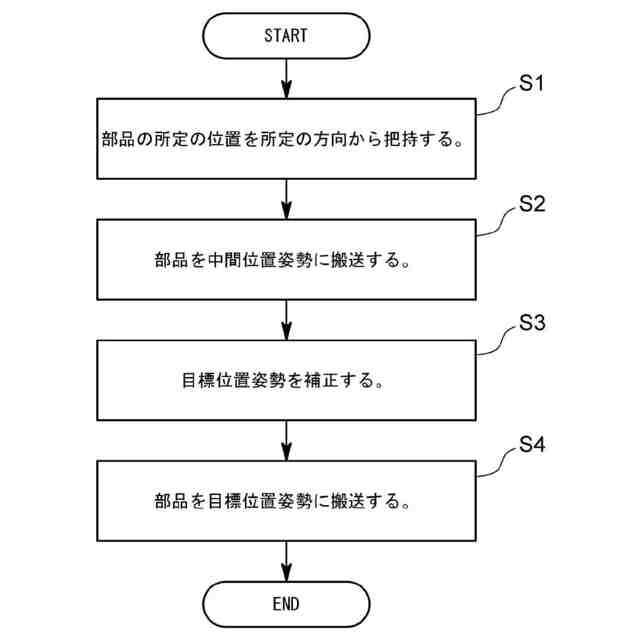
【課題】 演算処理の複雑化を抑制しながら、対象物を目標位置姿勢に迅速かつ高精度で搬送できる。
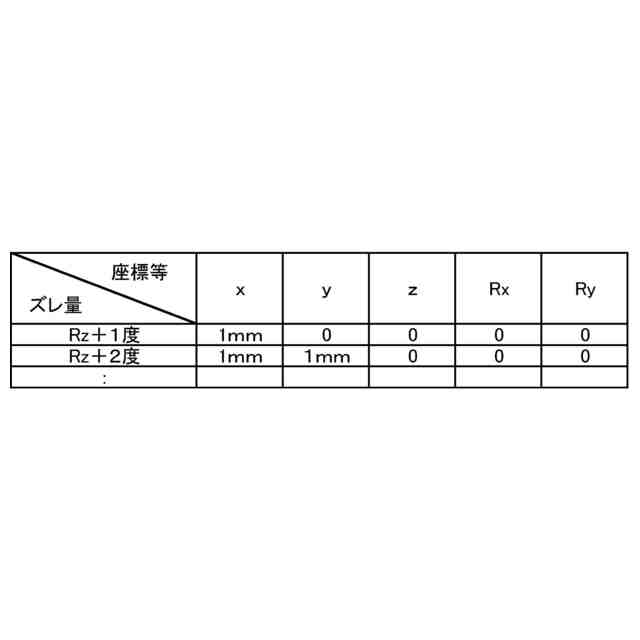
【解決手段】 対象物を搬送するアクチュエータと、該アクチュエータを制御して、前記対象物を予め定めた目標位置に目標姿勢となるように搬送させる制御装置とを備え、前記制御装置は、前記アクチュエータをシーケンス制御して前記対象物を前記目標位置および目標姿勢(以下、これらを総称するときは目標位置姿勢という。)となるように搬送した場合に生じる実際の位置および姿勢(以下、これらを総称するときは実位置姿勢という。)との間の誤差と、その目標位置姿勢との関係を示す誤差情報を予め記憶している誤差情報記憶部と、
前記誤差情報に基づいて前記目標位置姿勢を補正する目標位置姿勢補正部とを備えている。
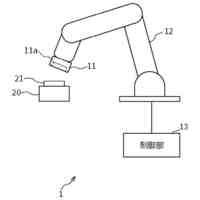
【選択図】図1
特許請求の範囲
【請求項1】
対象物を搬送するアクチュエータと、
該アクチュエータを制御して、前記対象物を予め定めた目標位置に目標姿勢となるように搬送させる制御装置とを備え、
前記制御装置は、
前記アクチュエータをシーケンス制御して前記対象物を前記目標位置および目標姿勢(以下、これらを総称するときは目標位置姿勢という。)となるように搬送した場合に生じる実際の位置および姿勢(以下、これらを総称するときは実位置姿勢という。)との間の誤差と、その目標位置姿勢との関係を示す誤差情報を予め記憶している誤差情報記憶部と、
前記誤差情報に基づいて前記目標位置姿勢を補正する目標位置姿勢補正部とを備えていることを特徴とする搬送システム。
続きを表示(約 1,300 文字)
【請求項2】
前記制御装置は、
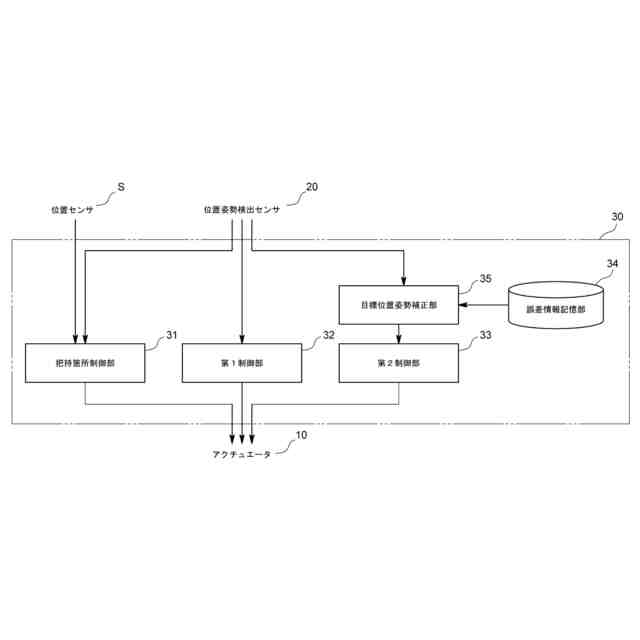
前記アクチュエータを制御して、前記目標位置姿勢を基準として定められた中間位置及び中間姿勢(以下、これらを総称するときは中間位置姿勢という。)に前記対象物を搬送させる第1制御部と、当該中間位置姿勢から前記目標位置姿勢に当該対象物を搬送させる第2制御部とを有しており、
前記誤差情報記憶部は、前記対象物を前記中間位置姿勢から前記目標位置姿勢にシーケンス制御によって搬送した場合に生じる実位置姿勢との間の誤差と、その目標位置姿勢との関係を示す誤差情報を記憶している請求項1記載の搬送システム。
【請求項3】
前記対象物の位置姿勢を検出する位置姿勢検出センサをさらに備えており、
前記第1制御部は、前記位置姿勢検出センサを利用して前記アクチュエータをフィードバック制御し、
前記第2制御部は、前記アクチュエータをシーケンス制御する請求項2記載の搬送システム。
【請求項4】
前記対象物の位置姿勢を検出する位置姿勢検出センサをさらに備えており、
前記第1制御部は、前記中間位置姿勢近傍まで前記対象物を搬送させる仮搬送制御部と、前記中間位置姿勢近傍から前記中間位置姿勢まで当該対象物を搬送させる本搬送制御部とを有し、
前記仮搬送制御部は、前記アクチュエータをシーケンス制御し、前記本搬送制御部は、前記位置姿勢検出センサを利用して前記アクチュエータをシーケンス制御又はフィードバック制御する請求項2記載の搬送システム。
【請求項5】
前記位置姿勢検出センサは、撮像装置である請求項3又は4のいずれかに記載の搬送システム。
【請求項6】
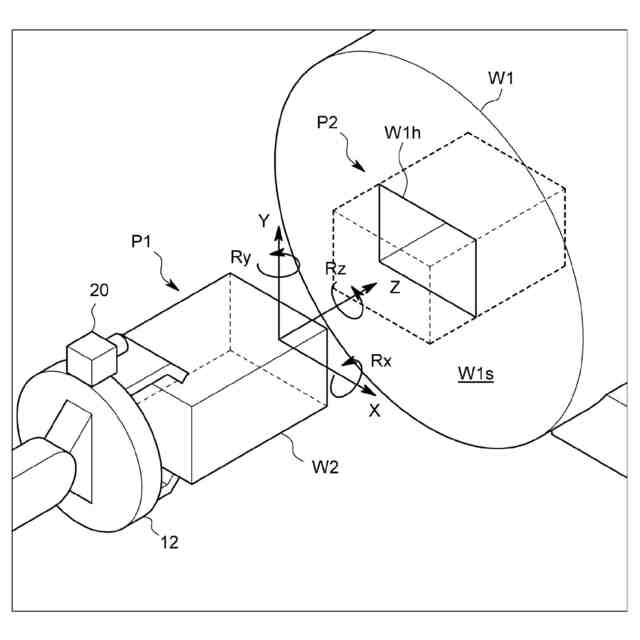
前記中間姿勢位置は、前記目標位置姿勢を特定する6座標のうちの少なくとも一つが一致するように定められる請求項2乃至4のいずれかに記載の搬送システム。
【請求項7】
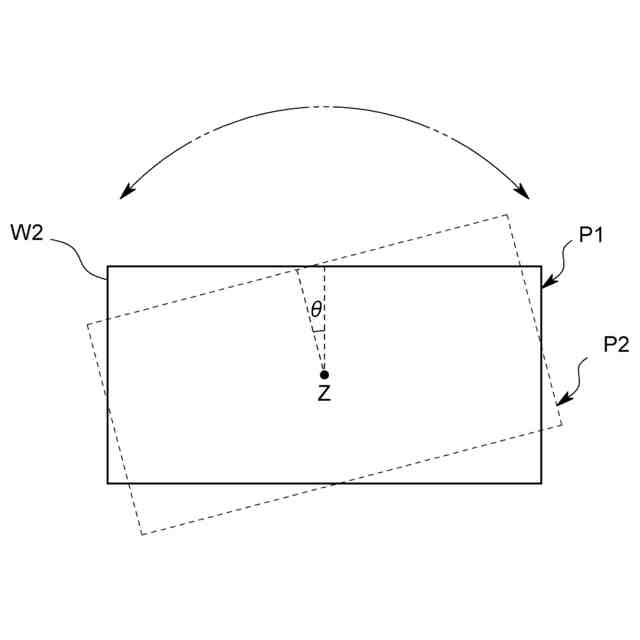
前記中間姿勢は、前記目標姿勢に対し、前記中間位置と前記目標位置を結ぶ直線周りの位相角のみがずれるように設定されている請求項2乃至4のいずれかに記載の搬送システム。
【請求項8】
前記制御装置は、前記アクチュエータによって、前記対象物の所定の位置を所定の方向から把持させる把持箇所制御部をさらに備えている請求項2乃至4のいずれかに記載の搬送システム。
【請求項9】
対象物を搬送するアクチュエータを制御して、前記対象物を予め定めた目標位置に目標姿勢となるように搬送させる制御装置に用いられるプログラムが記憶されたプログラム記憶媒体であって、
前記アクチュエータをシーケンス制御して前記対象物を前記目標位置および目標姿勢(以下、これらを総称するときは目標位置姿勢という。)となるように搬送した場合に生じる実際の位置および姿勢(以下、これらを総称するときは実位置姿勢という。)との間の誤差と、その目標位置姿勢との関係を示す誤差情報を予め記憶している誤差情報記憶部と、
前記誤差情報に基づいて前記目標位置姿勢を補正する目標位置姿勢補正部と、としての機能を前記制御装置に発揮させる前記プログラムが記憶されたプログラム記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送システム及びプログラム記憶媒体に関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
アクチュエータを用いて部品を製品本体に組み付ける場合、例えば予め配置図から計算して目標位置姿勢を設定し、部品をこの目標位置姿勢になるように搬送して製品本体に組み付ける。
【0003】
しかし、実際には、目標位置姿勢になるように搬送したつもりの部品がその目標位置姿勢からずれていることがある。この誤差は、配置図から読み取れないキャリブレーション精度などの複数の要因が考えられるが、特に部品が重い場合に生じ易いことから、アクチュエータの剛性不足が大きな要因と考えられる。
【0004】
この誤差を補正できる搬送システムとして、特許文献1には、アクチュエータが把持したワークを撮影できるカメラを設け、搬送中、このカメラで撮影して得た画像データに基づきリアルタイムでワークの位置をフィードバック的に補正するものが開示されている。
【0005】
しかしながら、特許文献1に係る搬送システムでは、例えば、孔内に対象物を差し込むなど、カメラでの撮像ができない状況で用いることはできない。また、搬送中、常に画像データを処理し続ける必要があるため、高い能力の画像処理装置が必要となるし、その能力が足りない場合は、その演算時間が搬送速度のボトルネックとなる場合もある。
【先行技術文献】
【特許文献】
【0006】
特開2007-782号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上述した課題を解決すべくなされたものであって、演算処理の複雑化を抑制しながら、対象物を目標位置姿勢に迅速かつ高精度で搬送できるようにすべく図ったものである。
【課題を解決するための手段】
【0008】
すなわち、本発明に係る搬送システムは、対象物を搬送するアクチュエータと、該アクチュエータを制御して、前記対象物を予め定めた目標位置に目標姿勢となるように搬送させる制御装置とを備え、前記制御装置は、前記アクチュエータをシーケンス制御して前記対象物を前記目標位置および目標姿勢(以下、これらを総称するときは目標位置姿勢という。)となるように搬送した場合に生じる実際の位置および姿勢(以下、これらを総称するときは実位置姿勢という。)との間の誤差と、その目標位置姿勢との関係を示す誤差情報を予め記憶している誤差情報記憶部と、前記誤差情報に基づいて前記目標位置姿勢を補正する目標位置姿勢補正部とを備えていることを特徴とするものである。
【0009】
本発明によれば、アクチュエータによる搬送誤差を予め組み込んで、対象物を目標位置姿勢に搬送するので、例えばカメラで撮影できない状況でも用いることができる。また、演算処理の複雑化を抑制できるので、対象物を目標位置姿勢に迅速かつ高精度で搬送できる。
【0010】
誤差情報は、前提条件が増えるほど作成の手間が増える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
1か月前
川崎重工業株式会社
ハンド
17日前
株式会社アイセイ
搬送装置
23日前
個人
けがき用治具
11日前
国立大学法人金沢大学
ロボット
29日前
株式会社不二越
ロボット
9日前
株式会社マキタ
電動工具
1か月前
株式会社不二越
ロボット操作装置
8日前
個人
深孔スリーブ駆動ロッド構造
1日前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボット
9日前
川崎重工業株式会社
ロボットシステム
17日前
株式会社黒澤鉄工製作所
けがき用治具
11日前
株式会社デンソー
操縦桿
9日前
日本信号株式会社
作業機制御システム
1か月前
個人
バール
1日前
梅馨堂合同会社
人協働ロボットシステム
3日前
株式会社京阪エンジニアリング
脱着装置
1か月前
株式会社マキタ
集塵アタッチメント
1か月前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
アピュアン株式会社
衝撃工具
24日前
株式会社スター精機
ワーク搬送装置
1か月前
株式会社不二越
基板搬送用ロボット
18日前
ARMA株式会社
UI付エンドエフェクタ
4日前
株式会社コスメック
把持装置
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
原利興工業有限公司
工具用スリーブ
29日前
株式会社不二越
ロボットビジョンシステム
1か月前
株式会社マキタ
電動工具
23日前
若井ホールディングス株式会社
レンチ構造とその製造方法
11日前
株式会社マキタ
作業機
29日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
23日前
株式会社マキタ
作業機
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ