TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025045528
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023153488
出願日
2023-09-20
発明の名称
工具システム、工具、処理方法及びプログラム
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人北斗特許事務所
主分類
B25F
5/00 20060101AFI20250326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】利便性の向上を図る。
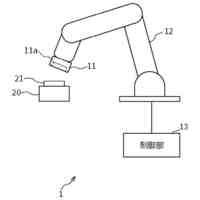
【解決手段】工具システム100は、動力源からの動力により動作する駆動部11及び撮像部14を有する可搬型の工具1と、撮像制御部154と、判定部155と、画像処理部156と、を備える。撮像制御部154は、撮像部14を制御して、基準位置と撮像部14の被写体との距離に関する距離情報を含む距離画像を生成させる。判定部155は、距離画像に含まれる距離情報に基づいて、距離画像のうち基準位置と被写体との距離が所定条件を満たす領域を特定領域と判定する。画像処理部156は、距離画像から特定領域とは異なる領域を除外した処理画像を生成する。
【選択図】図1
特許請求の範囲
【請求項1】
動力源からの動力により動作する駆動部及び撮像部を有する可搬型の工具と、
前記撮像部を制御して、基準位置と前記撮像部の被写体との距離に関する距離情報を含む画像を生成させる撮像制御部と、
前記距離情報に基づいて、前記画像のうち前記基準位置と前記被写体との前記距離が所定条件を満たす領域を特定領域と判定する判定部と、
前記画像から前記特定領域とは異なる領域を除外した処理画像を生成する画像処理部と、を備える、
工具システム。
続きを表示(約 1,100 文字)
【請求項2】
動力源からの動力により動作する駆動部及び撮像部を有する可搬型の工具と、
前記撮像部を制御して、基準位置と前記撮像部の被写体との距離に関する距離情報を含む画像を生成させる撮像制御部と、
前記距離情報に基づいて、前記画像のうち前記基準位置と前記被写体との前記距離が所定条件を満たす領域を基準特定領域と判定する第1判定部と、
前記撮像部が更に撮像し、前記画像と異なる比較画像と、前記画像とを比較し、前記比較画像のうち前記基準特定領域に対応する領域を対応特定領域と判定する第2判定部と、
前記比較画像から前記対応特定領域とは異なる領域を除外した処理画像を生成する画像処理部と、を備える、
工具システム。
【請求項3】
前記工具は、締結部材を被締結部材に締結する作業に用いられ、
前記被写体は、前記被締結部材を含み、
前記所定条件は、前記基準位置と前記被締結部材との基準距離を下回るという条件である、
請求項1又は2に記載の工具システム。
【請求項4】
前記被写体は、前記工具に取り付けられる先端工具を含み、
前記先端工具は、棒状の本体部と、前記本体部の先端に機械的に接続され、前記締結部材と接触する作業部と、を有し、
前記所定条件は、前記基準距離である第1基準距離を下回り、かつ、前記基準位置と前記本体部の前記先端との第2基準距離を上回るという条件である、
請求項3に記載の工具システム。
【請求項5】
予め入力される前記本体部の長さに基づいて、前記第2基準距離を設定する設定部を更に備える、
請求項4に記載の工具システム。
【請求項6】
前記画像を入力として、前記本体部の長さを出力するように機械学習された学習済みモデルによって出力された前記本体部の長さに基づいて、前記第2基準距離を設定する設定部を更に備える、
請求項4に記載の工具システム。
【請求項7】
前記画像処理部は、前記処理画像から、外部から指示された領域を除外する、
請求項1又は2に記載の工具システム。
【請求項8】
前記画像処理部は、前記処理画像から、前記基準位置と前記被写体との前記距離が異常値となる領域を除外する、
請求項1又は2に記載の工具システム。
【請求項9】
前記撮像部は、ステレオカメラを含む、
請求項1又は2に記載の工具システム。
【請求項10】
請求項1又は2に記載の工具システムが備える、
工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は一般に工具システム、工具、処理方法及びプログラムに関し、より詳細には、可搬型の工具を備える工具システム、工具、処理方法及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来より、画像から対象物以外の背景を除外することにより、対象物の形状を取得する形状取得方法が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-60032号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているような形状取得方法においては、対象物が写っていない画像と対象物が写っている画像との差分をとることで対象物が写っている画像から背景を除外するため、対象物が写っていない画像と対象物が写っている画像とを別々に用意する必要があった。これにより、利便性が低下するという問題があった。
【0005】
本開示は上記事由に鑑みてなされ、利便性の向上を図ることができる工具システム、工具、処理方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
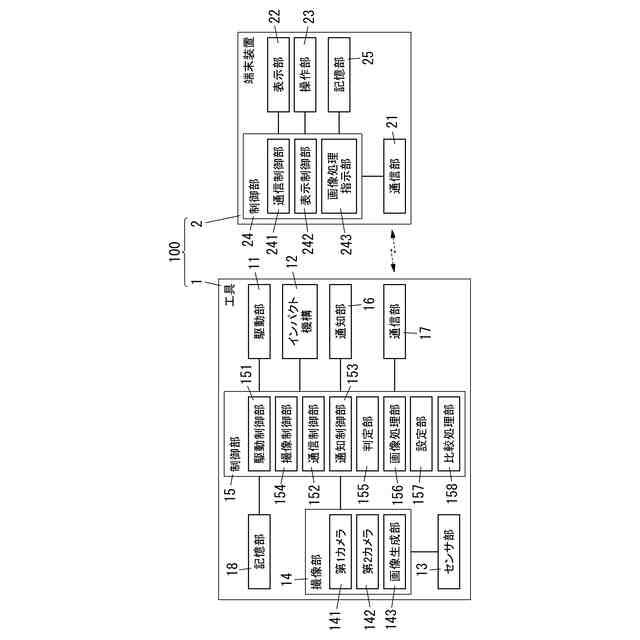
本開示の一態様に係る工具システムは、動力源からの動力により動作する駆動部及び撮像部を有する可搬型の工具と、撮像制御部と、判定部と、画像処理部と、を備える。前記撮像制御部は、前記撮像部を制御して、基準位置と前記撮像部の被写体との距離に関する距離情報を含む画像を生成させる。前記判定部は、前記距離情報に基づいて、前記画像のうち前記基準位置と前記被写体との前記距離が所定条件を満たす領域を特定領域と判定する。前記画像処理部は、前記画像から前記特定領域とは異なる領域を除外した処理画像を生成する。
【0007】
本開示の一態様に係る工具システムは、動力源からの動力により動作する駆動部及び撮像部を有する可搬型の工具と、撮像制御部と、第1判定部と、第2判定部と、画像処理部と、を備える。前記撮像制御部は、前記撮像部を制御して、基準位置と前記撮像部の被写体との距離に関する距離情報を含む画像を生成させる。前記第1判定部は、前記距離情報に基づいて、前記画像のうち前記基準位置と前記被写体との前記距離が所定条件を満たす領域を基準特定領域と判定する。前記第2判定部は、前記撮像部が更に撮像し、前記画像と異なる比較画像と、前記画像とを比較し、前記比較画像のうち前記基準特定領域に対応する領域を対応特定領域と判定する。前記画像処理部は、前記比較画像から前記対応特定領域とは異なる領域を除外した処理画像を生成する。
【0008】
本開示の一態様に係る工具は、前記工具システムが備える工具である。
【0009】
本開示の一態様に係る処理方法は、撮像制御ステップと、判定ステップと、画像処理ステップと、を含む。前記撮像制御ステップでは、動力源からの動力により動作する駆動部を有する可搬型の工具に搭載される撮像部を制御して、基準位置と前記撮像部の被写体との距離に関する距離情報を含む画像を生成させる。前記判定ステップでは、前記距離情報に基づいて、前記画像のうち前記基準位置と前記被写体との前記距離が所定条件を満たす領域を特定領域と判定する。前記画像処理ステップでは、前記画像から前記特定領域とは異なる領域を除外した処理画像を生成する。
【0010】
本開示の一態様に係る処理方法は、撮像制御ステップと、第1判定ステップと、第2判定ステップと、画像処理ステップと、を含む。前記撮像制御ステップでは、動力源からの動力により動作する駆動部を有する可搬型の工具に搭載される撮像部を制御して、基準位置と前記撮像部の被写体との距離に関する距離情報を含む画像を生成させる。前記第1判定ステップでは、前記距離情報に基づいて、前記画像のうち前記基準位置と前記被写体との前記距離が所定条件を満たす領域を基準特定領域と判定する。前記第2判定ステップでは、前記撮像部が更に撮像し、前記画像と異なる比較画像と、前記画像とを比較し、前記比較画像のうち前記基準特定領域に対応する領域を対応特定領域と判定する。前記画像処理ステップでは、前記比較画像から前記対応特定領域とは異なる領域を除外した処理画像を生成する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
22日前
株式会社アイセイ
搬送装置
28日前
株式会社不二越
ロボット
14日前
国立大学法人金沢大学
ロボット
1か月前
個人
けがき用治具
16日前
株式会社不二越
ロボット操作装置
13日前
個人
深孔スリーブ駆動ロッド構造
6日前
株式会社ケー・エフ・シー
締結構造
1か月前
川崎重工業株式会社
ロボット
14日前
株式会社デンソー
操縦桿
14日前
川崎重工業株式会社
ロボットシステム
22日前
工機ホールディングス株式会社
作業機
1日前
株式会社黒澤鉄工製作所
けがき用治具
16日前
個人
バール
6日前
梅馨堂合同会社
人協働ロボットシステム
8日前
アピュアン株式会社
衝撃工具
29日前
株式会社不二越
基板搬送用ロボット
23日前
ARMA株式会社
UI付エンドエフェクタ
9日前
株式会社コスメック
把持装置
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
若井ホールディングス株式会社
レンチ構造とその製造方法
16日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
学校法人法政大学
装着型アシスト装置
3日前
株式会社マキタ
作業機
13日前
三菱電機株式会社
トルク締め個所検出システム
6日前
株式会社マキタ
打ち込み工具
28日前
高丸工業株式会社
ロボット操作システムの動作方法
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ