TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043975
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023151608
出願日
2023-09-19
発明の名称
ロボットシステム、制御方法、物品の製造方法、プログラム、及び記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
9/10 20060101AFI20250325BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
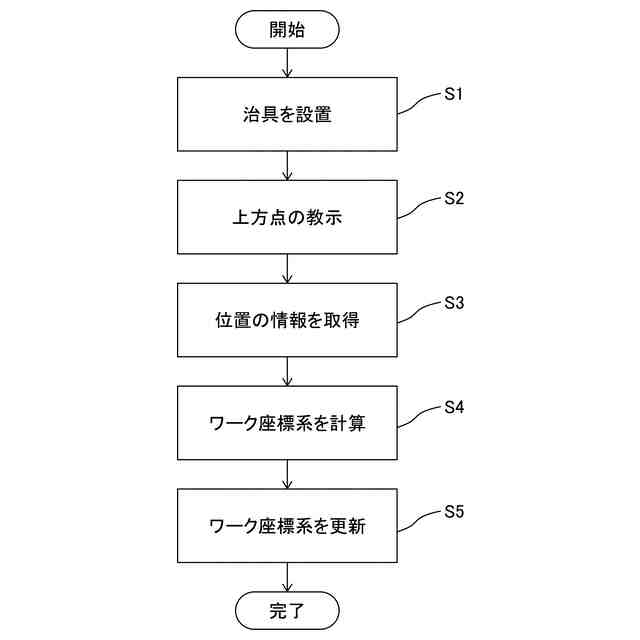
【課題】ロボットと作業台との相対的な位置関係の情報の取得に有利な技術を提供する。
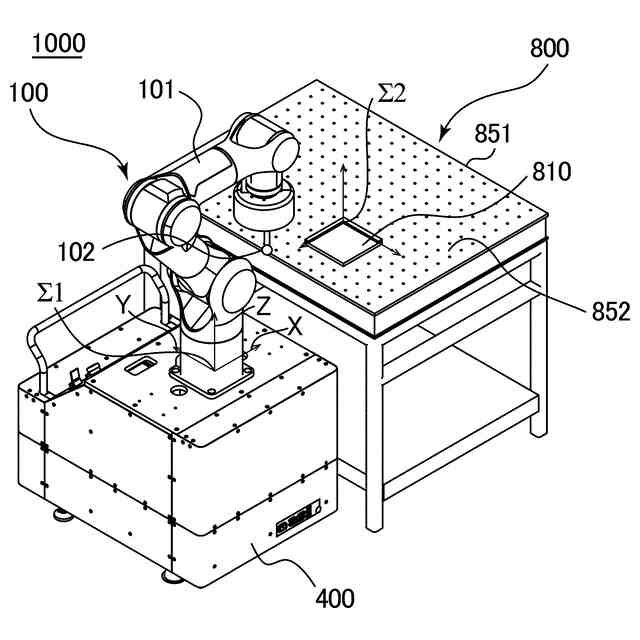
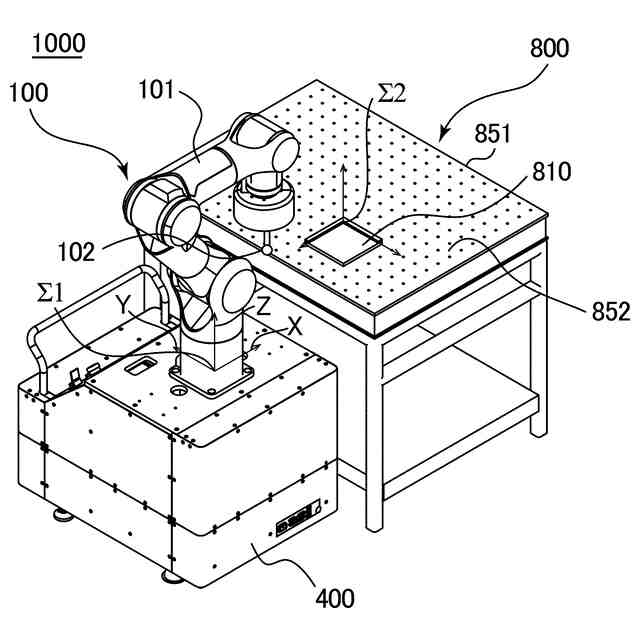
【解決手段】ロボットシステムは、ロボットと、前記ロボットが作業する作業台と、前記ロボットと前記作業台との相対的な位置関係の情報に基づいて前記ロボットを制御する制御部と、を備え、前記制御部は、前記ロボットの所定部分を前記作業台に接触させた状態で前記所定部分を第1位置から第2位置を経由して第3位置まで移動させた場合の移動経路上の位置の情報を取得し、前記移動経路上の位置の情報に基づいて、前記位置関係の情報を取得する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットと、
前記ロボットが作業する作業台と、
前記ロボットと前記作業台との相対的な位置関係の情報に基づいて前記ロボットを制御する制御部と、を備え、
前記制御部は、
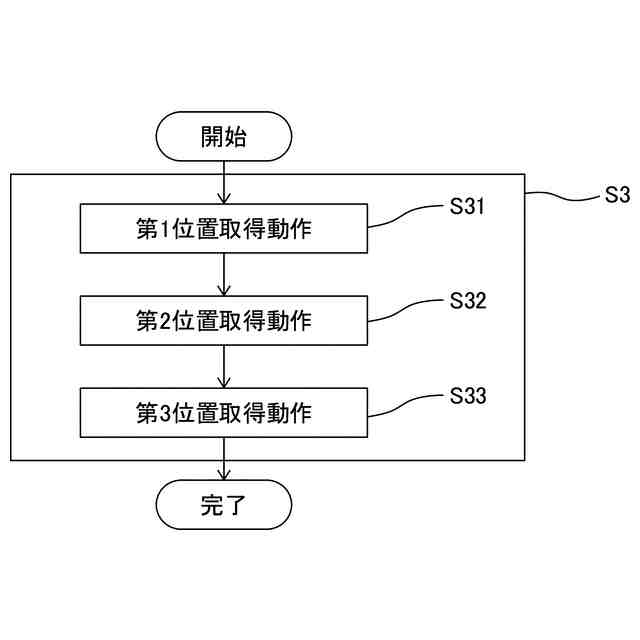
前記ロボットの所定部分を前記作業台に接触させた状態で前記所定部分を第1位置から第2位置を経由して第3位置まで移動させた場合の移動経路上の位置の情報を取得し、
前記移動経路上の位置の情報に基づいて、前記位置関係の情報を取得する、
ことを特徴とするロボットシステム。
続きを表示(約 990 文字)
【請求項2】
前記移動経路上の位置の情報は、前記第1位置の情報、前記第2位置の情報、及び前記第3位置の情報を含む、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項3】
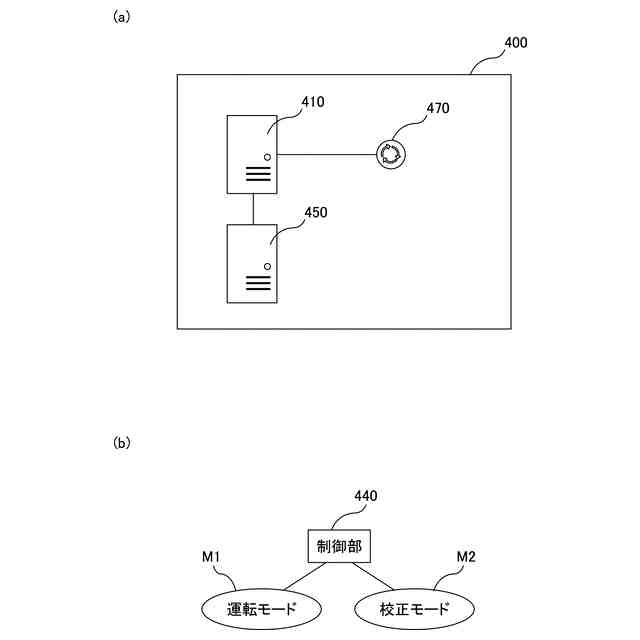
前記制御部は、第1モードにおいて、前記位置関係の情報に基づいて前記ロボットを制御し、第2モードにおいて、前記位置関係の情報を取得する、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項4】
前記作業台に対して移動可能な移動架台を更に備え、
前記ロボットは、前記移動架台に配置されている、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項5】
前記所定部分は、プローブである、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項6】
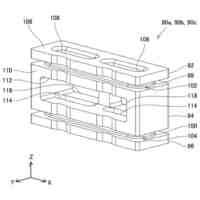
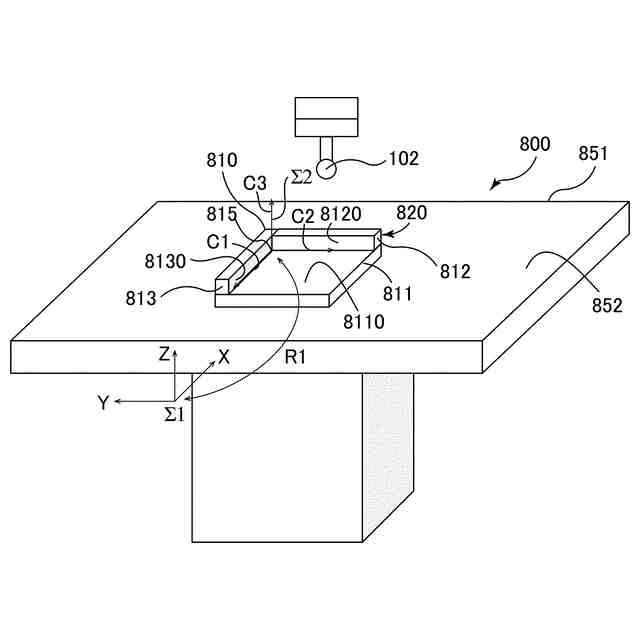
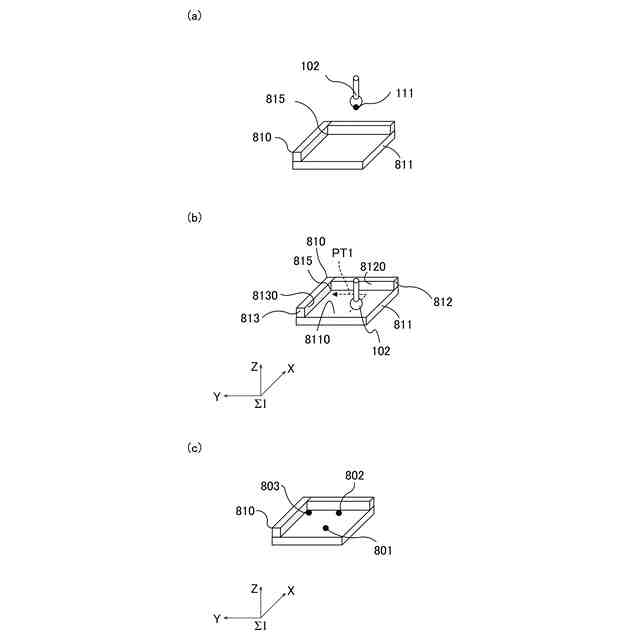
前記作業台は、平面と、前記所定部分が接触可能であり、前記所定部分を前記第3位置に案内する形状の接触部と、を有する、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項7】
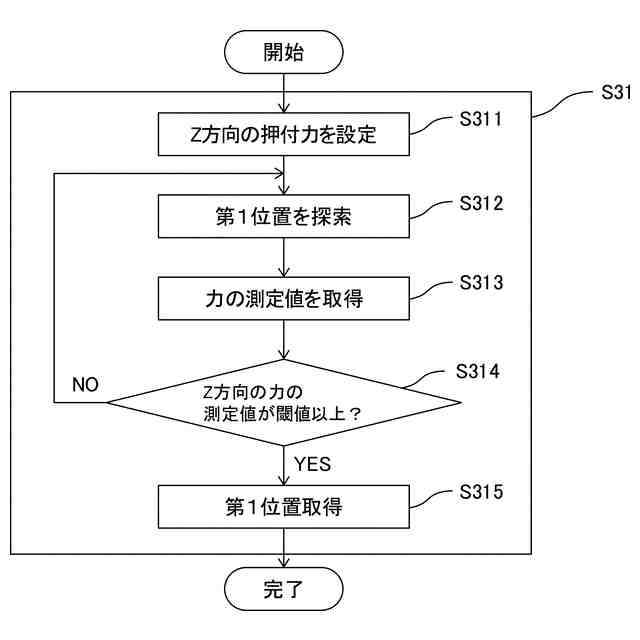
前記制御部は、前記所定部分を前記平面に接触させて、前記第1位置の情報を取得する、
ことを特徴とする請求項6に記載のロボットシステム。
【請求項8】
前記所定部分を前記平面に接触させた後、前記所定部分を前記第1位置から第1方向に移動させ、
前記所定部分を前記接触部に接触させることに成功した場合、前記第2位置の情報を取得する、
ことを特徴とする請求項6に記載のロボットシステム。
【請求項9】
前記制御部は、前記所定部分を前記接触部に接触させることに失敗した場合、前記所定部分を前記第1位置から前記第1方向とは異なる方向に移動させる、
ことを特徴とする請求項8に記載のロボットシステム。
【請求項10】
前記制御部は、前記所定部分を前記接触部に接触させた後、前記所定部分を前記第2位置から前記接触部に倣って第2方向に移動させ、
前記所定部分を前記第3位置に位置決めすることに成功した場合、前記第3位置の情報を取得する、
ことを特徴とする請求項8に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットの技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
工場等の作業現場のレイアウトを変更するのに柔軟に対応するために、ロボット及び/又は作業台を移動可能とすることが考えられている。ロボット及び/又は作業台を移動させると、ロボットと作業台との相対的な位置が変更される。そのため、ロボットと作業台との相対的な位置関係の情報を取得する必要がある。
【0003】
従来、ロボットと作業台との相対的な位置関係の情報を取得する方法として、3点計測法が用いられている。3点計測法は、ロボットアームの先端に取り付けられたツールを、ロボットアームを動作させることにより移動させて、3つの位置の情報を取得し、3つの位置の情報からロボットと作業台との相対的な位置関係を計算する方法である。
【0004】
特許文献1は、校正治具の3つの穴にツールを嵌合させて取得した3つの位置の情報を取得する方法を開示している。特許文献2は、作業台の3箇所のそれぞれにL字型のブロックを配置し、各ブロックにツールを接触させて3つの位置の情報を取得する方法を開示している。
【先行技術文献】
【特許文献】
【0005】
特開2010-284750号公報
特開2015-33747号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来の方法では、位置の情報を取得するために、ツールを校正治具やL字型のブロックのそれぞれに精度よく位置決めして接触させる必要があり、作業に時間がかかっていた。
【0007】
本開示は、ロボットと作業台との相対的な位置関係の情報の取得に有利な技術を提供することにある。
【課題を解決するための手段】
【0008】
本開示の第1態様は、ロボットと、前記ロボットが作業する作業台と、前記ロボットと前記作業台との相対的な位置関係の情報に基づいて前記ロボットを制御する制御部と、を備え、前記制御部は、前記ロボットの所定部分を前記作業台に接触させた状態で前記所定部分を第1位置から第2位置を経由して第3位置まで移動させた場合の移動経路上の位置の情報を取得し、前記移動経路上の位置の情報に基づいて、前記位置関係の情報を取得する、ことを特徴とするロボットシステムである。
【0009】
本開示の第2態様は、ロボットと作業台との相対的な位置関係の情報に基づいて前記ロボットを制御する制御部の制御方法であって、前記ロボットの所定部分を前記作業台に接触させた状態で前記所定部分を第1位置から第2位置を経由して第3位置まで移動させた場合の移動経路上の位置の情報を取得し、前記移動経路上の位置の情報に基づいて、前記位置関係の情報を取得する、ことを特徴とする制御方法である。
【発明の効果】
【0010】
本開示によれば、ロボットと作業台との相対的な位置関係の情報の取得に有利な技術が提供される。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
22日前
株式会社アイセイ
搬送装置
28日前
株式会社不二越
ロボット
14日前
個人
けがき用治具
16日前
国立大学法人金沢大学
ロボット
1か月前
個人
深孔スリーブ駆動ロッド構造
6日前
株式会社不二越
ロボット操作装置
13日前
川崎重工業株式会社
ロボット
14日前
川崎重工業株式会社
ロボットシステム
22日前
工機ホールディングス株式会社
作業機
1日前
株式会社黒澤鉄工製作所
けがき用治具
16日前
個人
バール
6日前
株式会社デンソー
操縦桿
14日前
梅馨堂合同会社
人協働ロボットシステム
8日前
株式会社不二越
基板搬送用ロボット
23日前
アピュアン株式会社
衝撃工具
29日前
ARMA株式会社
UI付エンドエフェクタ
9日前
株式会社コスメック
把持装置
1か月前
国立大学法人 東京大学
ロボットアーム
1か月前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社マキタ
作業機
13日前
株式会社マキタ
電動工具
28日前
学校法人法政大学
装着型アシスト装置
3日前
株式会社マキタ
電動工具
28日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
28日前
株式会社マキタ
電動工具
28日前
若井ホールディングス株式会社
レンチ構造とその製造方法
16日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
28日前
三菱電機株式会社
トルク締め個所検出システム
6日前
株式会社マキタ
打ち込み工具
28日前
高丸工業株式会社
ロボット操作システムの動作方法
6日前
セイコーエプソン株式会社
ロボットシステム
1か月前
シブヤパッケージングシステム株式会社
物品移載装置
14日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ