TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044639
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023152338
出願日
2023-09-20
発明の名称
遠隔操作制御装置、操作制御システム、遠隔操作制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20250326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】扱える対象物と作業の種類を拡大することができる遠隔操作制御装置、操作制御システム、遠隔操作制御方法、およびプログラムを提供することを目的とする。
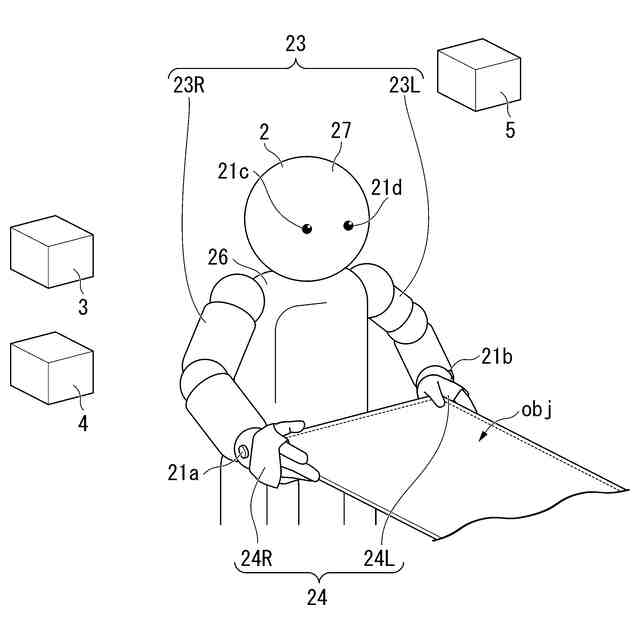
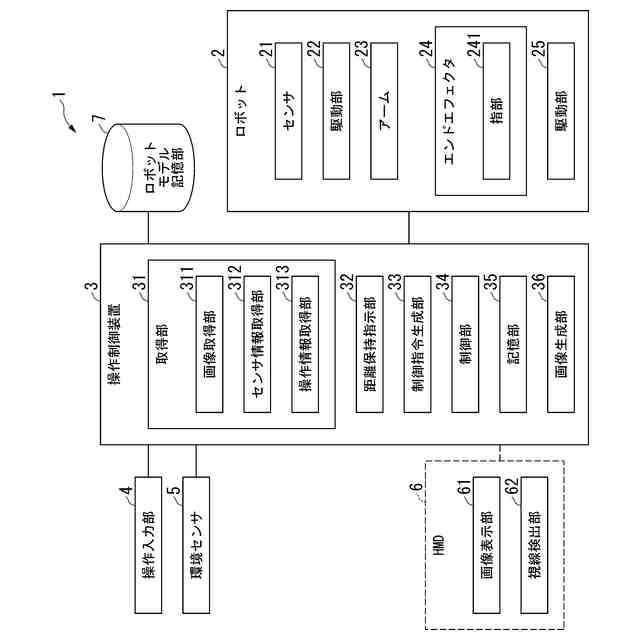
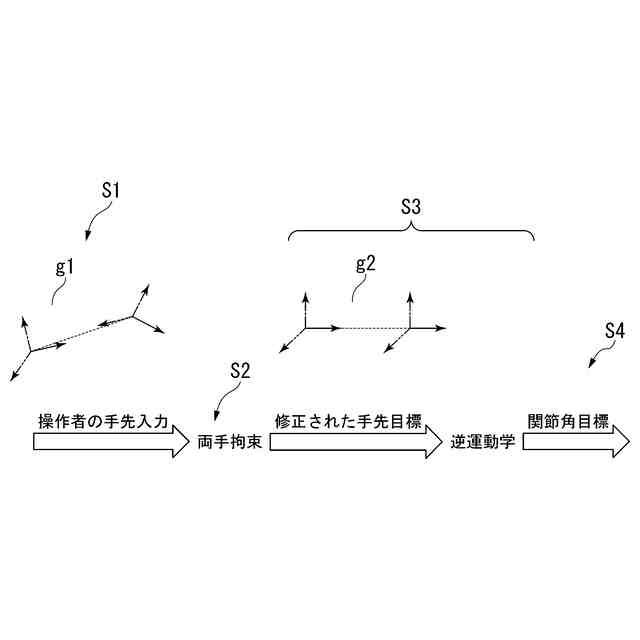
【解決手段】遠隔操作制御装置は、エンドエフェクタ間の距離を一定に保つ指示を出す距離保持指示部と、距離保持指示部からの指示があった動作に対し、操作者の動作指示を、エンドエフェクタ間の相対関係を保持するようにエンドエフェクタの目標位置を修正し、修正されたエンドエフェクタの目標に対応した幾何拘束に、ロボットによって操作される操作対象物に対して任意の力を加える仮想バネを加えた制約表現から、アームの制御指令を算出する制御指令生成部と、を備える。
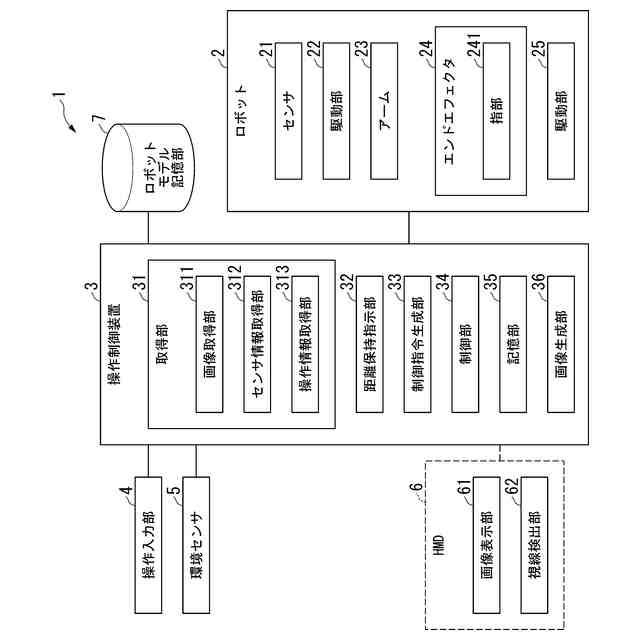
【選択図】図2
特許請求の範囲
【請求項1】
操作者の動きを認識し、複数のアームと、前記アームに接続される操作対象物を操作するエンドエフェクタを有するロボットに前記操作者の動きを伝えて前記ロボットによって操作対象物を操作する遠隔操作において、
前記エンドエフェクタ間の距離を一定に保つ指示を出す距離保持指示部と、
前記距離保持指示部からの指示があった動作に対し、
前記操作者の動作指示を、前記エンドエフェクタ間の相対関係を保持するように前記エンドエフェクタの目標位置を修正し、
修正された前記エンドエフェクタの目標に対応した幾何拘束に、前記ロボットによって操作される操作対象物に対して任意の力を加える仮想バネを加えた制約表現から、前記アームの制御指令を算出する制御指令生成部と、
を備える遠隔操作制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記アームの制御指令は、前記アームの関節角目標であり、
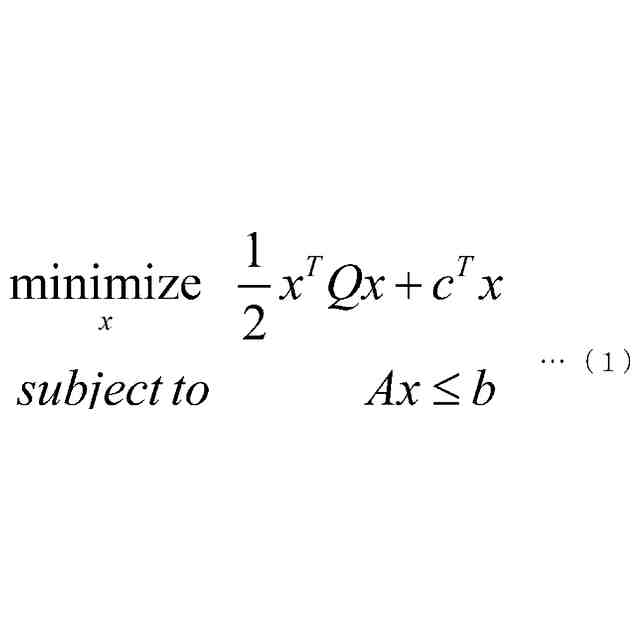
前記関節角目標を算出する際には、修正された前記エンドエフェクタの目標に対応した幾何拘束に前記ロボットによって操作される対象物に対して任意の力を加える前記仮想バネを加えた制約条件下において逆運動学を解く、
請求項1に記載の遠隔操作制御装置。
【請求項3】
前記仮想バネの力は、目標相対位置をΔx増減させることでf=k(バネ係数)Δxに対応する力fである、
請求項1に記載の遠隔操作制御装置。
【請求項4】
前記仮想バネの力は、3次元空間における位置と姿勢の6自由度それぞれについて独立で制御可能である、
請求項1に記載の遠隔操作制御装置。
【請求項5】
前記制御指令生成部は、
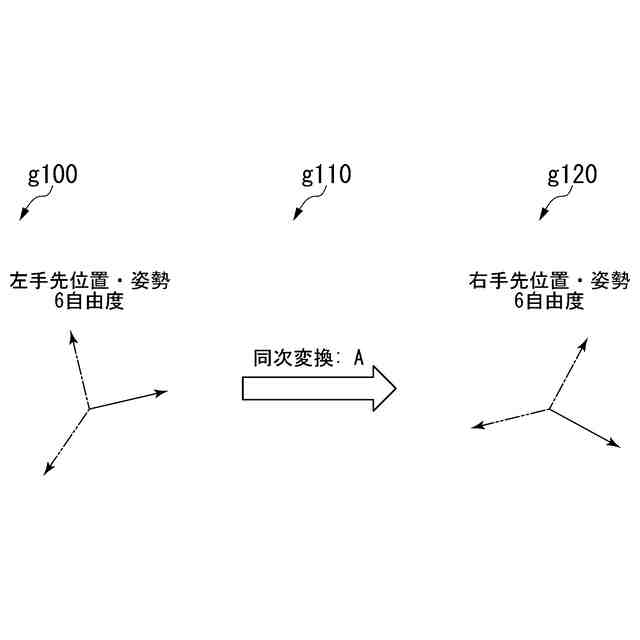
前記複数のアームのうちの第1のアームに接続される第1のエンドエフェクタから見た、前記複数のアームのうちの前記第1のアーム以外の第2のアームに接続される第2のエンドエフェクタの相対関係を示す座標変換が一定になるように保持することで、前記エンドエフェクタ間の相対関係を保持する、
請求項1に記載の遠隔操作制御装置。
【請求項6】
前記制御指令生成部は、
前記動作指示、作業環境に設置されている撮影装置が撮影した画像のうちの少なくとも1つを用いて、前記操作者の操作意図を推定し、推定した前記操作意図に基づいて前記エンドエフェクタ間の相対関係を一定に保つ指示を出す、
請求項1に記載の遠隔操作制御装置。
【請求項7】
複数のアームと、前記アームそれぞれに接続されるエンドエフェクタを備えるロボットと、前記ロボットの動作を制御する操作制御装置と、を備え、
前記操作制御装置は、
前記エンドエフェクタ間の距離を一定に保つ指示を出す距離保持指示部と、
前記距離保持指示部からの指示があった動作に対し、
操作者の動作指示を、前記エンドエフェクタ間の相対関係を保持するように前記エンドエフェクタの目標位置を修正し、
修正された前記エンドエフェクタの目標に対応した幾何拘束に、前記ロボットによって操作される操作対象物に対して任意の力を加える仮想バネを加えた制約表現から、前記アームの制御指令を算出する制御指令生成部と、
を備える操作制御システム。
【請求項8】
複数のアームと、前記アームそれぞれに接続されるエンドエフェクタを備えるロボットの動作を制御する操作制御装置における遠隔操作制御方法であって、
前記エンドエフェクタ間の距離を一定に保つ指示を出し、
前記指示があった動作に対し、
操作者の動作指示を、前記エンドエフェクタ間の相対関係を保持するように前記エンドエフェクタの目標位置を修正し、
修正された前記エンドエフェクタの目標に対応した幾何拘束に、前記ロボットによって操作される操作対象物に対して任意の力を加える仮想バネを加えた制約表現から、前記アームの制御指令を算出する、
遠隔操作制御方法。
【請求項9】
複数のアームと、前記アームそれぞれに接続されるエンドエフェクタを備えるロボットの動作を制御する操作制御装置のコンピュータに、
前記エンドエフェクタ間の距離を一定に保つ指示を出させ、
前記指示があった動作に対し、
操作者の動作指示を、前記エンドエフェクタ間の相対関係を保持するように前記エンドエフェクタの目標位置を修正させ、
修正された前記エンドエフェクタの目標に対応した幾何拘束に、前記ロボットによって操作される操作対象物に対して任意の力を加える仮想バネを加えた制約表現から、前記アームの制御指令を算出させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作制御装置、操作制御システム、遠隔操作制御方法、およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
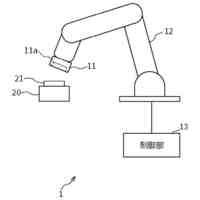
操作対象物に対して作業を行うロボットを、遠隔操作する技術が開発されている(例えば特許文献1参照)。このような作業のタスクは、ロボットの把持部で、操作対象物を掴ませる。なお、一般的な遠隔操縦ロボットでは、操作者が多自由度アームの手先位置を直接指令する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/21226号
【発明の概要】
【発明が解決しようとする課題】
【0004】
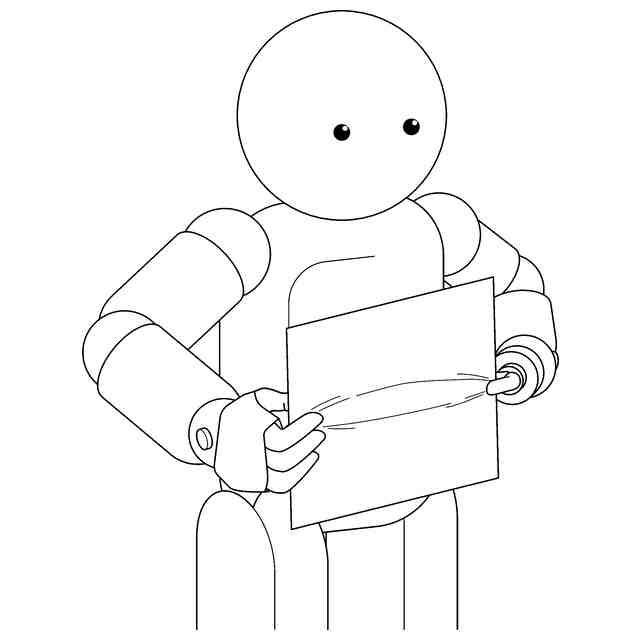
しかしながら、従来技術では、複数の多自由度アームを備えた遠隔操縦ロボットに不十分であった。例えば,双腕作業においては、対象物に加えて両手間の相対的な関係を保持することが重要である。従来技術では、これによる操作者への負担増加が避けられなかった。また、対象物によっては、両手関係の保持がタスクの遂行や出来栄えに影響する。このため、従来技術では、操作者の技量への依存が高まるという課題があった。このため、遠隔操作で作業可能な作業の種類や作業対象が限られてしまうという課題があった。
【0005】
本発明は、上記の問題点に鑑みてなされたものであって、扱える対象物と作業の種類を拡大することができる遠隔操作制御装置、操作制御システム、遠隔操作制御方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
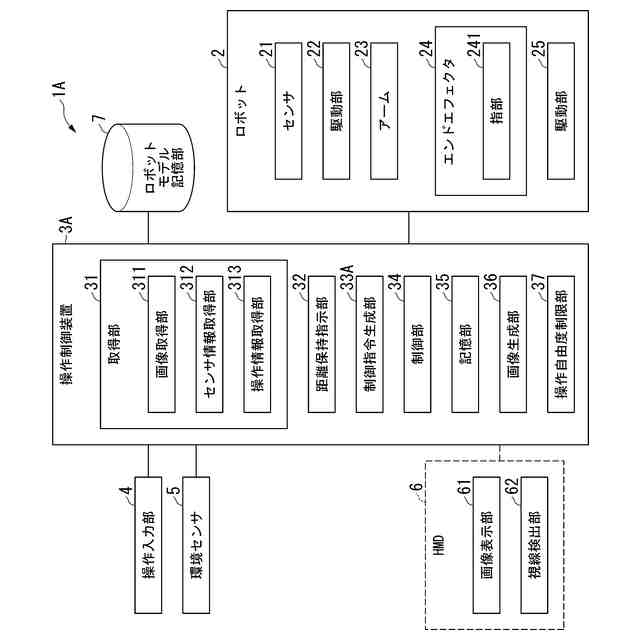
(1)上記目的を達成するため、本発明の一態様に係る遠隔操作制御装置は、操作者の動きを認識し、複数のアームと、前記アームに接続される操作対象物を操作するエンドエフェクタを有するロボットに前記操作者の動きを伝えて前記ロボットによって操作対象物を操作する遠隔操作において、前記エンドエフェクタ間の距離を一定に保つ指示を出す距離保持指示部と、前記距離保持指示部からの指示があった動作に対し、前記操作者の動作指示を、前記エンドエフェクタ間の相対関係を保持するように前記エンドエフェクタの目標位置を修正し、修正された前記エンドエフェクタの目標に対応した幾何拘束に、前記ロボットによって操作される操作対象物に対して任意の力を加える仮想バネを加えた制約表現から、前記アームの制御指令を算出する制御指令生成部と、を備える遠隔操作制御装置である。
【0007】
(2)また、上記(1)に記載の一態様に係る遠隔操作制御装置において、前記アームの制御指令は、前記アームの関節角目標であり、前記関節角目標を算出する際には、修正された前記エンドエフェクタの目標に対応した幾何拘束に前記ロボットによって操作される対象物に対して任意の力を加える前記仮想バネを加えた制約条件下において逆運動学を解くようにしてもよい。
【0008】
(3)また、上記(1)または(2)に記載の一態様に係る遠隔操作制御装置において、前記仮想バネの力は、目標相対位置をΔx増減させることでf=k(バネ係数)Δxに対応する力fであるようにしてもよい。
【0009】
(4)また、上記(1)から(3)のうちのいずれか1つに記載の一態様に係る遠隔操作制御装置において、前記仮想バネの力は、3次元空間における位置と姿勢の6自由度それぞれについて独立で制御可能であるようにしてもよい。
【0010】
(5)また、上記(1)から(4)のうちのいずれか1つに記載の一態様に係る遠隔操作制御装置において、前記制御指令生成部は、前記複数のアームのうちの第1のアームに接続される第1のエンドエフェクタから見た、前記複数のアームのうちの前記第1のアーム以外の第2のアームに接続される第2のエンドエフェクタの相対関係を示す座標変換が一定になるように保持することで、前記エンドエフェクタ間の相対関係を保持するようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
1か月前
川崎重工業株式会社
ハンド
15日前
株式会社アイセイ
搬送装置
21日前
個人
けがき用治具
9日前
国立大学法人金沢大学
ロボット
27日前
株式会社不二越
ロボット
7日前
株式会社マキタ
電動工具
1か月前
株式会社不二越
ロボット操作装置
6日前
川崎重工業株式会社
ロボット
7日前
株式会社ケー・エフ・シー
締結構造
1か月前
株式会社黒澤鉄工製作所
けがき用治具
9日前
日本信号株式会社
作業機制御システム
1か月前
株式会社デンソー
操縦桿
7日前
川崎重工業株式会社
ロボットシステム
15日前
株式会社京阪エンジニアリング
脱着装置
1か月前
梅馨堂合同会社
人協働ロボットシステム
1日前
株式会社不二越
基板搬送用ロボット
16日前
ARMA株式会社
UI付エンドエフェクタ
2日前
株式会社マキタ
集塵アタッチメント
1か月前
株式会社スター精機
ワーク搬送装置
1か月前
アピュアン株式会社
衝撃工具
22日前
トヨタ自動車株式会社
把持装置、把持方法
1か月前
株式会社コスメック
把持装置
28日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
国立大学法人 東京大学
ロボットアーム
28日前
株式会社不二越
ロボットビジョンシステム
1か月前
原利興工業有限公司
工具用スリーブ
27日前
株式会社マキタ
電動工具
21日前
株式会社マキタ
電動工具
21日前
株式会社マキタ
作業機
27日前
株式会社マキタ
電動工具
21日前
株式会社マキタ
作業機
27日前
株式会社マキタ
作業機
27日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ