TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025044054
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023151741
出願日
2023-09-19
発明の名称
ロボットおよびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250325BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】振動の検出精度を高めることができるロボットおよびロボットシステムを提供すること。
【解決手段】設置面に設置される基台と、基台に対し第1回動軸回りに回動可能に基台に接続される第1アームと、第1アームに対し第1回動軸と平行な第2回動軸回りに回動可能に前記第1アームに接続される第2アームと、第2アームに対し第1回動軸と平行な第3回動軸回りに回動可能でかつ第3回動軸の軸方向に沿って移動可能に第2アームに接続され、第1アーム側に端部を有するシャフトと、基台に設けられた振動検出部と、を備え、第2アームからシャフトの端部までのシャフトの長さは、第2アームと第1アームとの間の第3回動軸の軸方向に沿った距離よりも短いことを特徴とするロボット。
【選択図】図3
特許請求の範囲
【請求項1】
設置面に設置される基台と、
前記基台に対し第1回動軸回りに回動可能に前記基台に接続される第1アームと、
前記第1アームに対し前記第1回動軸と平行な第2回動軸回りに回動可能に前記第1アームに接続される第2アームと、
前記第2アームに対し前記第1回動軸と平行な第3回動軸回りに回動可能でかつ前記第3回動軸の軸方向に沿って移動可能に前記第2アームに接続され、前記第1アーム側に端部を有するシャフトと、
前記基台に設けられた振動検出部と、を備え、
前記第2アームから前記シャフトの前記端部までの前記シャフトの長さは、前記第2アームと前記第1アームとの間の前記第3回動軸の軸方向に沿った距離よりも短いことを特徴とするロボット。
続きを表示(約 1,000 文字)
【請求項2】
前記基台は、前記設置面に固定されるフランジ部を有し、
前記振動検出部は、前記フランジ部に設けられている請求項1に記載のロボット。
【請求項3】
前記基台は、前記第1アーム側に開放する凹部を有し、
前記振動検出部は、前記凹部内に設置されている請求項1に記載のロボット。
【請求項4】
前記基台内に配置され、前記振動検出部を支持する振動増幅部材を備える請求項1に記載のロボット。
【請求項5】
前記基台に設けられ、前記第1アームを回動駆動する第1駆動源を備え、
前記振動増幅部材は、前記第1駆動源よりも高い位置で前記振動検出部を支持する請求項4に記載のロボット。
【請求項6】
前記基台に設けられ、前記第1アームを回動駆動する第1駆動源を備え、
前記第1駆動源と前記振動検出部とは、前記第1回動軸方向から見たとき、ずれて配置されている請求項1ないし5のいずれか1項に記載のロボット。
【請求項7】
前記基台と前記第1アームとを接続する接続部を備え、
前記接続部と前記振動検出部とは、前記第1回動軸方向から見たとき、ずれて配置されている請求項1ないし5のいずれか1項に記載のロボット。
【請求項8】
設置面に設置される基台と、
前記基台に対し第1回動軸回りに回動可能に前記基台に接続される第1アームと、
前記第1アームに対し前記第1回動軸と平行な第2回動軸回りに回動可能に前記第1アームに接続される第2アームと、
前記第2アームに対し前記第1回動軸と平行な第3回動軸回りに回動可能でかつ前記第3回動軸の軸方向に沿って移動可能に前記第2アームに接続され、前記第1アーム側に端部を有するシャフトと、
前記基台に設けられた振動検出部と、
前記振動検出部の検出値に基づいて前記第1アーム、前記第2アームおよび前記シャフトのうちの少なくとも1つの駆動を制御する制御部と、を備え、
前記第2アームから前記シャフトの前記端部までの前記シャフトの長さは、前記第2アームと前記第1アームとの間の前記第3回動軸の軸方向に沿った距離よりも短いことを特徴とするロボットシステム。
【請求項9】
前記制御部は、前記振動検出部の検出値に基づいて前記第1アーム、前記第2アームおよび前記シャフトのうちの少なくとも1つに対して制振制御を行う請求項8に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットおよびロボットシステムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
産業用ロボットの一つとして、例えば、特許文献1に記載されたような天井面に吊り下げられて設置される天吊り型スカラーロボットが知られている。
【0003】
特許文献1に記載の天吊り型スカラーロボットは、天井に固定されるベース(基台)と、ベースに連結され、水平面内で回動可能とされた第1アームと、第1アームに連結され、水平面内で回動可能とされた第2アームと、第2アームの先端に設けられ、ワーク(部品)の搬送等を行うためのツールが取り付けられる作動軸とを有している。また、第2アームには、作動軸を駆動するためのモーターや減速機が固定されている。第1アームと、第2アームとでロボットアームが構成される。
【0004】
このような天吊り型スカラーロボットにおいては、ロボットアームの先端部に振動検出器としての加速度センサーが設置され、この加速度センサーが検出した検出値に基づいて、ロボットの振動を抑制する制振制御が行われることがある。
【先行技術文献】
【特許文献】
【0005】
WO2012/029174号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の天吊り型スカラーロボットでは、架台の天井に設置されて用いられるため、ロボットの振動や、架台の振動等を正確に検出するには、適正な箇所に振動検出器を設置する必要があるが、従来では振動検出器の設置位置に関し、十分な工夫がなされていなかったため、振動の検出精度が不十分であった。
【課題を解決するための手段】
【0007】
本発明のロボットは、設置面に設置される基台と、
前記基台に対し第1回動軸回りに回動可能に、前記基台に接続される第1アームと、
前記第1アームに対し前記第1回動軸と平行な第2回動軸回りに回動可能に、前記第1アームに接続される第2アームと、
前記第2アームに対し前記第1回動軸と平行な第3回動軸回りに回動可能でかつ前記第3回動軸の軸方向に沿って移動可能に、前記第2アームに接続され、前記第1アーム側に端部を有するシャフトと、
前記基台に設けられた振動検出部と、を備え、
前記第2アームから前記シャフトの前記端部までの前記シャフトの長さは、前記第2アームと前記第1アームとの間の前記第3回動軸の軸方向に沿った距離よりも短い。
【0008】
本発明のロボットシステムは、設置面に設置される基台と、
前記基台に対し第1回動軸回りに回動可能に、前記基台に接続される第1アームと、
前記第1アームに対し前記第1回動軸と平行な第2回動軸回りに回動可能に、前記第1アームに接続される第2アームと、
前記第2アームに対し前記第1回動軸と平行な第3回動軸回りに回動可能でかつ前記第3回動軸の軸方向に沿って移動可能に、前記第2アームに接続され前記第1アーム側に端部を有するシャフトと、
前記基台に設けられた振動検出部と、
前記振動検出部の検出値に基づいて前記第1アーム、前記第2アームおよび前記シャフトのうちの少なくとも1つの駆動を制御する制御部と、を備え、
前記第2アームから前記シャフトの前記端部までの前記シャフトの長さは、前記第2アームと前記第1アームとの間の前記第3回動軸の軸方向に沿った距離よりも短い。
【図面の簡単な説明】
【0009】
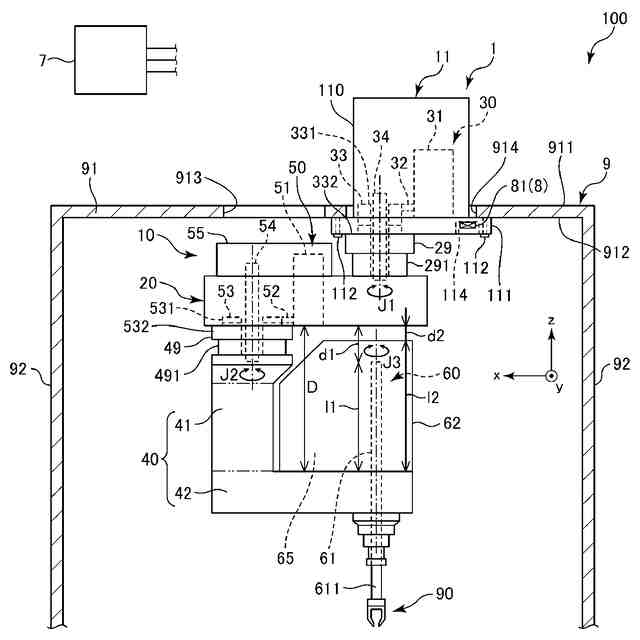
図1は、本発明のロボットおよびロボットシステムの第1実施形態の側面図である。
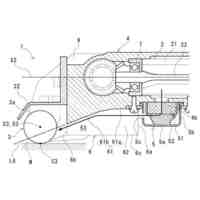
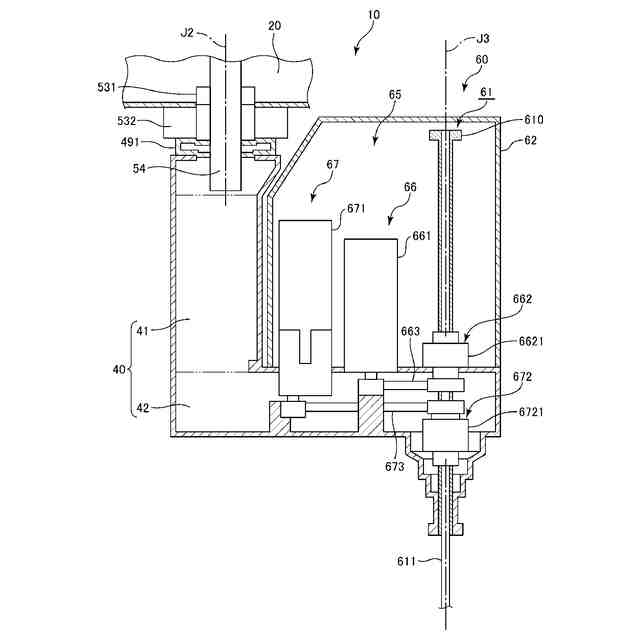
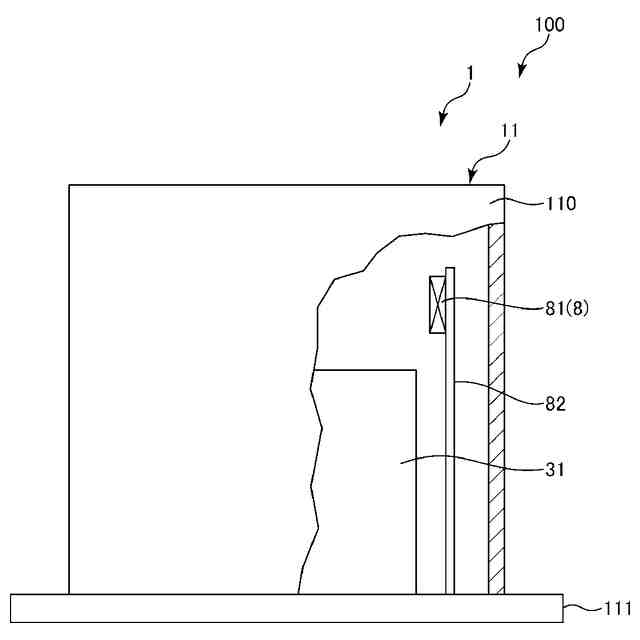
図2は、図1に示すロボットの部分拡大断面図である。
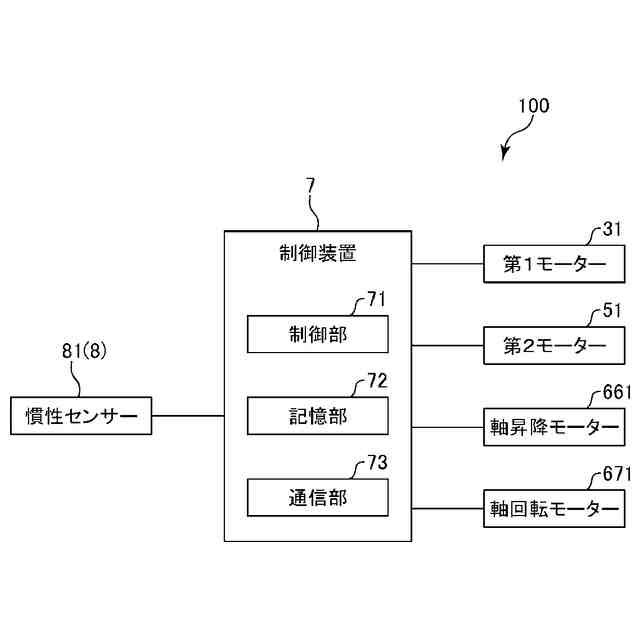
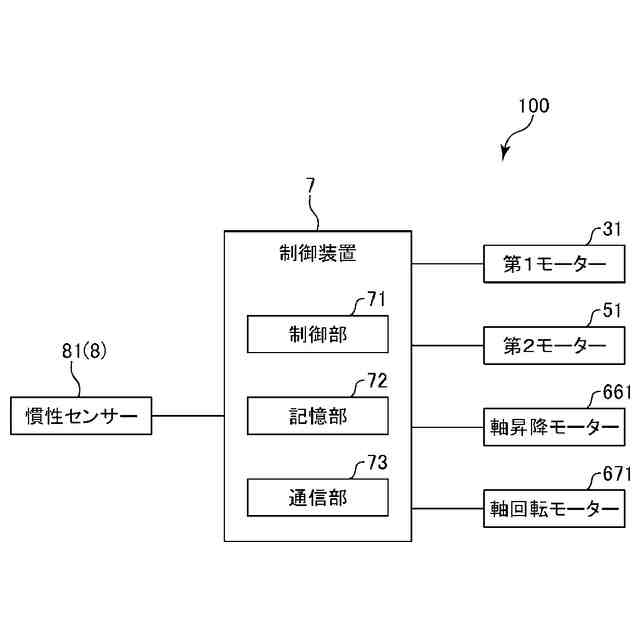
図3は、図1に示すロボットシステムのブロック図である。
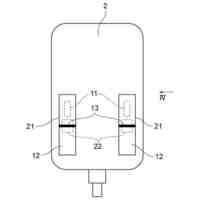
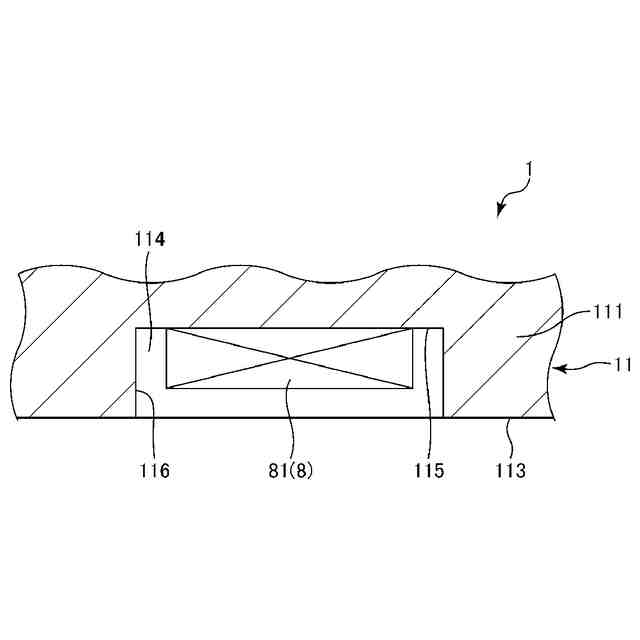
図4は、図1に示す基台および振動検出部の拡大断面図である。
図5は、本発明のロボットおよびロボットシステムの第2実施形態が備える基台および振動検出部の部分断面図である。
【発明を実施するための形態】
【0010】
以下、本発明のロボットおよびロボットシステムを添付図面に示す好適な実施形態に基づいて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ハンド
25日前
株式会社アイセイ
搬送装置
1か月前
株式会社不二越
ロボット
17日前
個人
けがき用治具
19日前
個人
深孔スリーブ駆動ロッド構造
9日前
株式会社不二越
ロボット操作装置
16日前
川崎重工業株式会社
ロボット
17日前
個人
バール
9日前
川崎重工業株式会社
ロボットシステム
25日前
株式会社黒澤鉄工製作所
けがき用治具
19日前
株式会社デンソー
操縦桿
17日前
工機ホールディングス株式会社
作業機
4日前
梅馨堂合同会社
人協働ロボットシステム
11日前
株式会社不二越
基板搬送用ロボット
26日前
ARMA株式会社
UI付エンドエフェクタ
12日前
株式会社デンソーウェーブ
ロボット制御システム
2日前
株式会社マキタ
作業機
16日前
若井ホールディングス株式会社
レンチ構造とその製造方法
19日前
学校法人法政大学
装着型アシスト装置
6日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
1か月前
三菱電機株式会社
トルク締め個所検出システム
9日前
高丸工業株式会社
ロボット操作システムの動作方法
9日前
株式会社不二越
ロボットの教示システム及び教示方法
3日前
シブヤパッケージングシステム株式会社
物品移載装置
17日前
中国電力株式会社
電動ドライバー
3日前
オムロン株式会社
モバイルロボット
3日前
株式会社デンソー
作業装置および作業プログラム
17日前
オムロン株式会社
モバイルロボット
3日前
株式会社デンソー
解体装置および解体プログラム
17日前
株式会社不二越
通信端末装置及びロボット制御システム
1か月前
株式会社ベッセル工業
インパクト工具
17日前
JUKI株式会社
ハンドリング装置
11日前
不二空機株式会社
エアツール及びエアツールの使用方法
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ