TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042948
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150167
出願日
2023-09-15
発明の名称
把持装置、把持システムおよび把持装置の制御方法
出願人
国立大学法人九州工業大学
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20250321BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
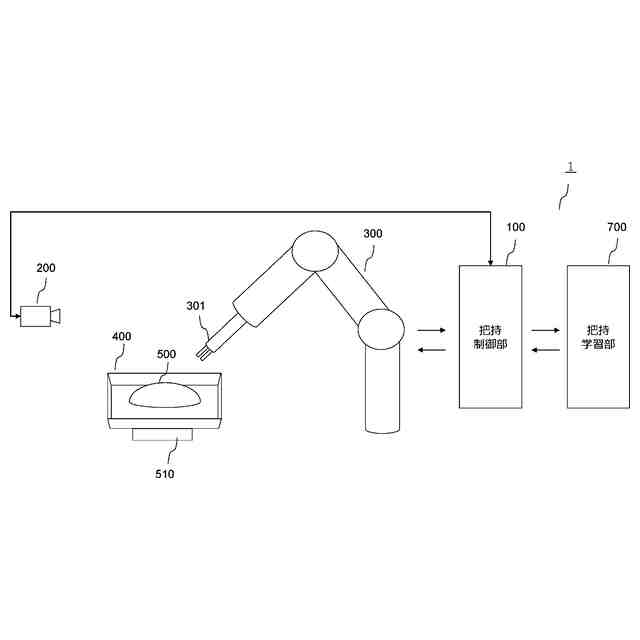
【課題】ロボット等を使用して食品を把持する装置において、麺などの紐状物体に対しても所定量を安定して把持することができる把持装置を提供する。
【解決手段】把持装置は、紐状物体である対象物を認識する対象物認識部と、複数の爪を備え、制御信号に基づき前記対象物を把持する把持部と、前記把持部の動作を学習し、学習パラメータを生成する把持学習部と、前記学習パラメータに基づき、前記制御信号を出力する制御部とを備え、前記制御部は、前記把持部に対し、前記対象物認識部で認識された対象物を第1の場所で把持し、前記第1の場所とは異なる第2の場所に載置する制御信号を出力する。
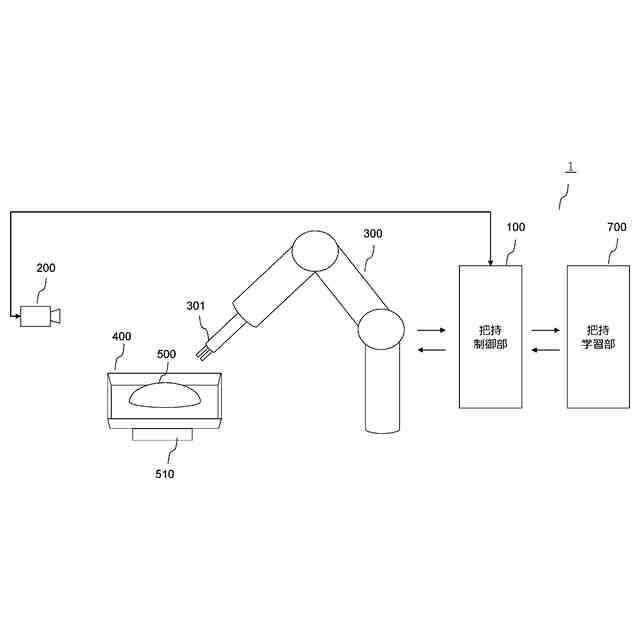
【選択図】図1
特許請求の範囲
【請求項1】
紐状物体である対象物を認識する対象物認識部と、
複数の爪を備え、制御信号に基づき前記対象物を把持する把持部と、
前記把持部の動作を学習し、学習パラメータを生成する把持学習部と、
前記学習パラメータに基づき、前記制御信号を出力する制御部と、を備え、
前記制御部は、前記把持部に対し、前記対象物認識部で認識された前記対象物を第1の場所で把持し、前記第1の場所とは異なる第2の場所に載置する前記制御信号を出力する
把持装置。
続きを表示(約 1,400 文字)
【請求項2】
前記対象物を撮像するカメラと、
前記カメラで撮像された画像から、所定の領域を抽出する画像抽出部と、
前記画像抽出部で抽出された画像から、前記把持部で把持された前記対象物の重量を予測する重量予測部と、
前記対象物が把持される前後の重量を計測し、この計測された値に基づき前記把持部で把持された前記対象物の重量を算出する重量算出部と、をさらに備え、
前記把持学習部は、前記重量予測部の出力と前記重量算出部の出力とに基づき学習を行って前記学習パラメータを生成する請求項1に記載の把持装置。
【請求項3】
前記把持学習部は、深層強化学習により学習を行う請求項2に記載の把持装置。
【請求項4】
前記紐状物体は、麺である、請求項1から請求項3のいずれかに記載の把持装置。
【請求項5】
前記制御部は、前記把持部に対し、前記爪の先端を前記対象物の上側表面から所定距離の範囲内で動作させる第2の制御信号をさらに出力する請求項1に記載の把持装置。
【請求項6】
前記制御部は、前記第1の場所に載置されている対象物の表面形状に応じて前記把持部を上下方向に移動させる第3の制御信号をさらに出力する請求項5に記載の把持装置。
【請求項7】
前記制御部は、前記爪を開閉させる第4の制御信号さらに出力し、前記第4の制御信号に基づき前記爪を開状態から閉状態に動作させ、前記第3の制御信号に基づき、前記把持部を上方向に移動させる請求項6記載の把持装置。
【請求項8】
前記所定距離は、3mmである請求項5に記載の把持装置。
【請求項9】
紐状物体である対象物を認識する対象物認識部と、
複数の爪を備え、制御信号に基づき前記対象物を把持する把持部と、
前記把持部の動作を学習し、学習パラメータを生成する把持学習部と、
前記学習パラメータに基づき、前記制御信号を出力する制御部と、を備え、
前記制御部は、前記把持部に対し、前記対象物認識部で認識された前記対象物を第1の場所で把持し、前記第1の場所とは異なる第2の場所に載置する前記制御信号を出力する把持装置と、
前記把持部の3Dモデルを生成するシミュレータと、
画像を表示する画像表示装置と、を備え、
前記画像表示装置は、カメラを備え、前記カメラで撮影された画像に、前記シミュレータにより生成された前記把持部の3Dモデルを合成して表示する、把持システム。
【請求項10】
紐状物体である対象物を把持する把持装置を制御する方法であって、
前記対象物を撮像し、
前記撮像された対象物の画像から、前記把持された対象物の重量を予測し、
前記対象物が把持される前後の重量を計測することにより、前記把持された対象物の重量を算出し、
前記予測された対象物の重量と、前記算出された対象物の重量とに基づき学習を行って学習パラメータを生成し、
前記学習パラメータに基づき、前記把持装置が前記対象物を第1の場所で把持し、前記第1の場所とは異なる第2の場所に載置する制御を行う、把持装置の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持装置、把持システムおよび把持装置の制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1には、麺状、粒状、薄板状、マカロニ状等の食品が盛られた状態から、その一部を掴み取って分配する分配装置が記載されている。具体的には、多指ハンドを任意の制御条件で制御し、盛られた食品から一部の食品を掴み取る動作を学習させる。そしてこの学習結果に基づき、盛られた食品から一部の食品を掴み取って分配するように制御する分配装置である。
【先行技術文献】
【特許文献】
【0003】
特許7044366号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
盛られた食品を掴み取って分配する場合、ある程度の精度を保ちながら、ばらつきなく安定的に所定量を取り分ける必要がある。しかし、例えば麺状の食品等を扱う場合には、麺を掴み取る際、稀に麺が絡まってしまうこともあり、安定的に所定量を取り分けることが困難な場合もある。
【0005】
そこで本発明は、麺などの紐状物体のような対象物であっても、所定量を把持して別の場所に載置することができる把持装置、把持システム、把持装置の制御方法及び制御プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の把持装置は、紐状物体である対象物を認識する対象物認識部と、複数の爪を備え、制御信号に基づき対象物を把持する把持部と、把持部の動作を学習し、学習パラメータを生成する把持学習部と、学習パラメータに基づき、制御信号を出力する制御部とを備え、制御部は、把持部に対し、対象物認識部で認識された対象物を第1の場所で把持し、前記第1の場所とは異なる第2の場所に載置する制御信号を出力する。
【0007】
本発明の把持システムは、把持装置とシミュレータと画像表示装置とを備える。把持装置は、紐状物体である対象物を認識する対象物認識部と、複数の爪を備え、制御信号に基づき前記対象物を把持する把持部と、把持部の動作を学習し、学習パラメータを生成する把持学習部と、学習パラメータに基づき、制御信号を出力する制御部とを備え、制御部は、把持部に対し、対象物認識部で認識された対象物を第1の場所で把持し、第1の場所とは異なる第2の場所に載置する制御信号を出力する。シミュレータは、把持部の3Dモデルを生成する。画像表示装置は、カメラを備え、カメラで撮影された画像に、シミュレータにより生成された把持部の3Dモデルを合成して表示する。
【0008】
本発明の把持装置の制御方法は、紐状物体である対象物を把持する把持装置を制御する方法であって、対象物を撮像し、撮像された対象物の画像から、把持された対象物の重量を予測し、対象物が把持される前後の重量を計測することにより、前記把持された対象物の重量を算出し、予測された対象物の重量と、算出された対象物の重量とに基づき学習を行って学習パラメータを生成し、学習パラメータに基づき、把持装置が対象物を第1の場所で把持し、第1の場所とは異なる第2の場所に載置する制御を行う。
【発明の効果】
【0009】
本発明によれば、紐状物体のような対象物であっても所定量を安定して把持し、別の場所に載置することができる。
【図面の簡単な説明】
【0010】
把持装置の構成を示す概略図
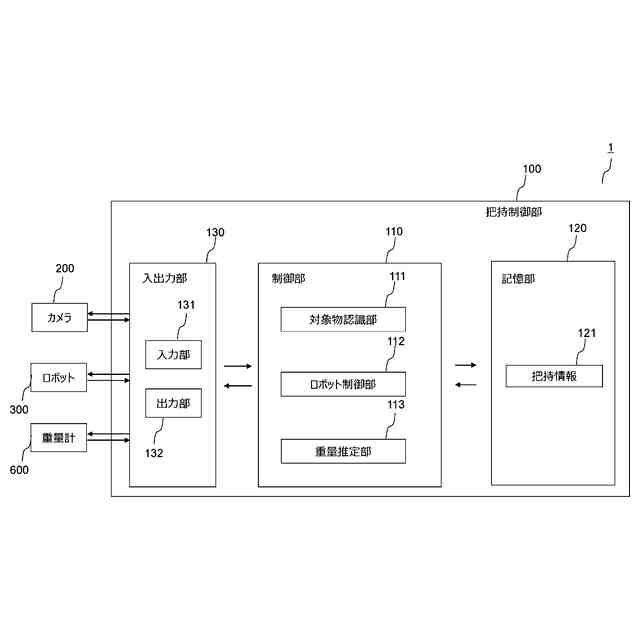
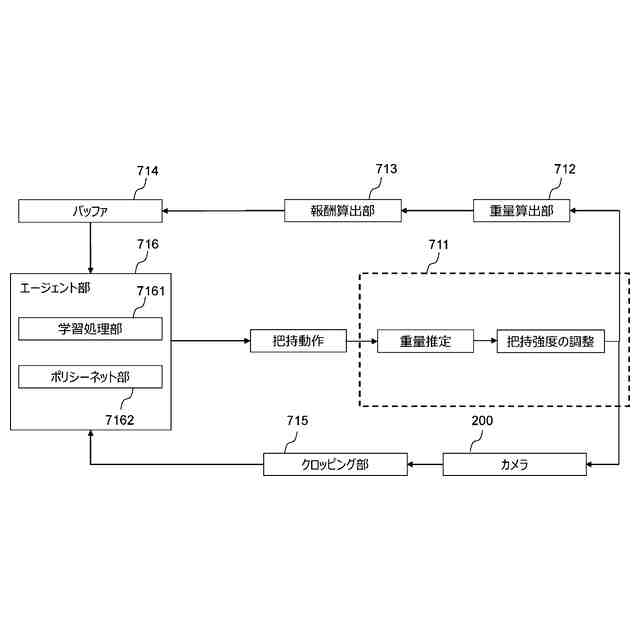
把持制御部の構成を示す図
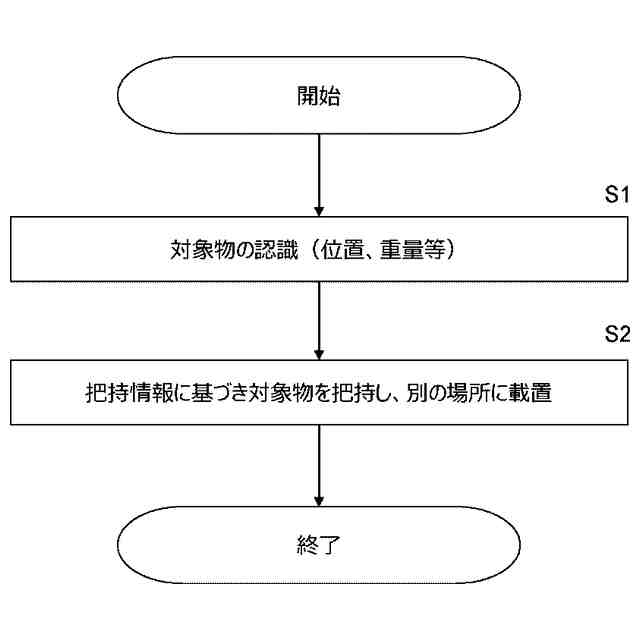
把持制御部の動作を示すフロー図
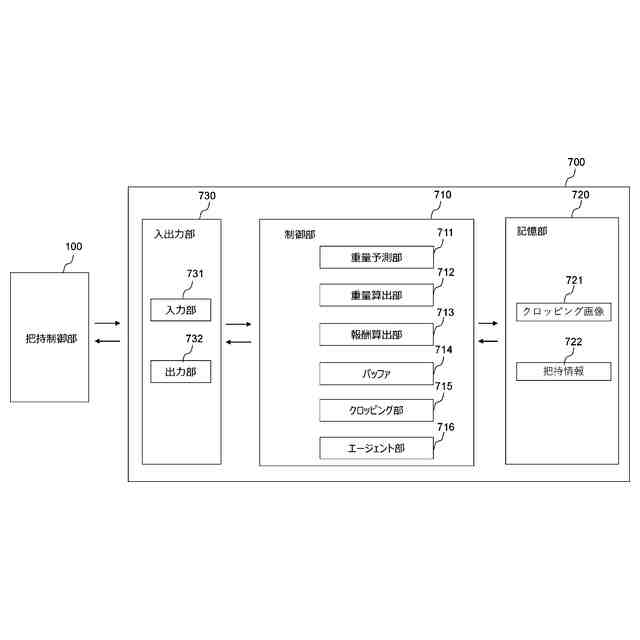
把持学習部のブロック図
把持学習部における学習の流れを説明する図
クロッピング処理を説明する図
ポリシーネットの動作を説明するフロー図
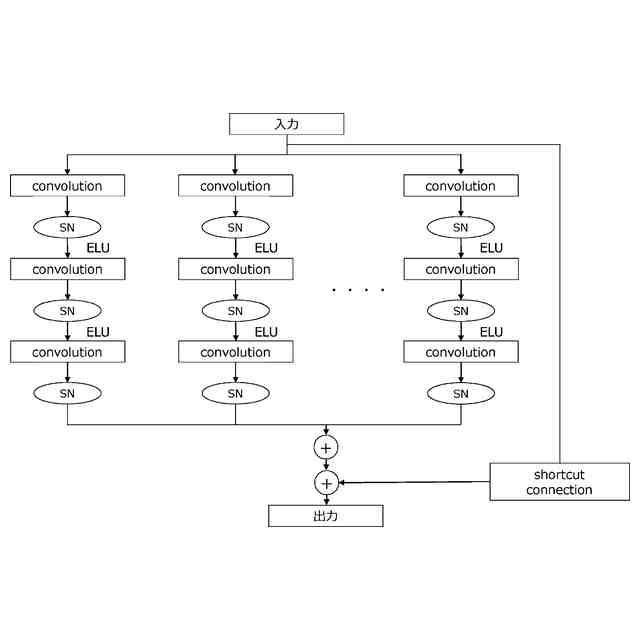
残差学習ブロックの一例を示す図
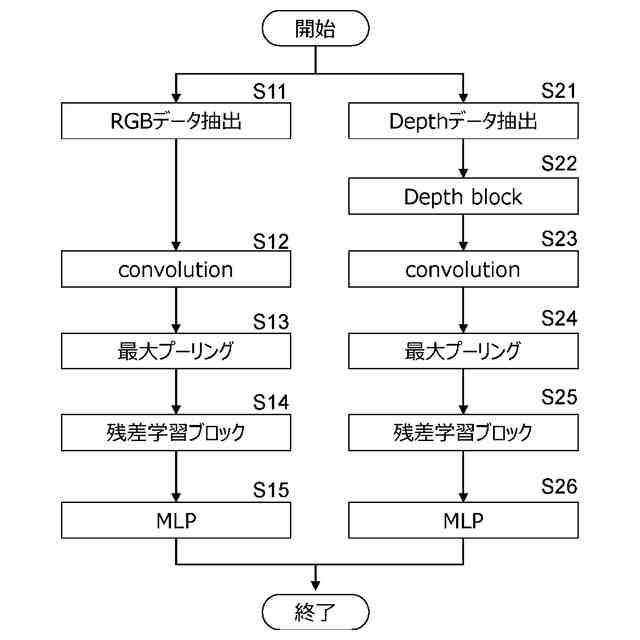
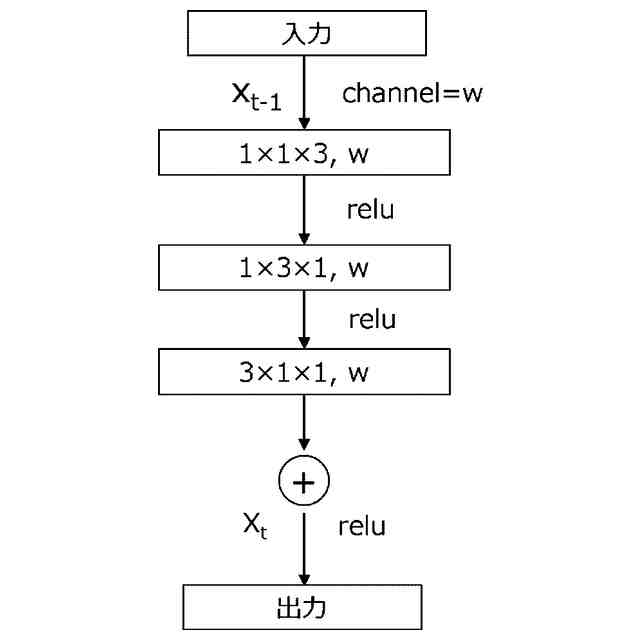
デプスブロック処理の一例を示す図
把持学習部における把持情報生成のフロー図
学習後の把持の様子を説明する図
学習後の把持動作による把持の重量と頻度を示す図
把持部が紐状物体を把持する例を示す図
把持部が固形物を把持する例を示す図
把持部が低反発の物体を把持する例を示す図
柔らかい物体を把持する際に用いる爪の拡大図
把持部が低反発の物体を把持する際の動作の様子を示す図
把持装置においてARを利用した場合の模式図
ARを利用した把持システムの構成を示す図
ARを利用した把持システムの動作フローを示す図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
27日前
株式会社クレスコ
補助吸着具
20日前
株式会社不二越
ロボット
12日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
27日前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
1か月前
川崎重工業株式会社
制動システム
12日前
住友重機械工業株式会社
ロボット
6日前
株式会社アイエイアイ
グリッパー
1日前
株式会社イノウ
給油口キャップ用開閉具
13日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
株式会社不二越
垂直多関節ロボット
13日前
芝浦機械株式会社
双腕ロボット
5日前
アイホン株式会社
ネジ締めカウントシステム
14日前
トヨタ自動車株式会社
荷姿影響緩和方法
2日前
パナソニック株式会社
工具
13日前
パナソニック株式会社
工具
13日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
住友重機械工業株式会社
ロボット及びカバー
6日前
アピュアン株式会社
エアー式衝撃工具
1か月前
学校法人法政大学
装着型アシスト装置
1か月前
三菱電機株式会社
トルク締め個所検出システム
1か月前
株式会社マキタ
打ち込み工具
14日前
住友重機械工業株式会社
アクチュエータ支持部材
5日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
6日前
株式会社マキタ
インパクト工具
28日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
株式会社マキタ
インパクト工具
28日前
中国電力株式会社
電動ドライバー
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
SB C&S株式会社
治具セット
27日前
オムロン株式会社
モバイルロボット
1か月前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
1か月前
JUKI株式会社
ハンドリング装置
1か月前
オムロン株式会社
モバイルロボット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ