TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025045909
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023153958
出願日
2023-09-20
発明の名称
ロボットシステム、ロボットシステムの制御方法、移動架台、移動架台の制御方法、物品の製造方法、プログラム、記録媒体
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
19/00 20060101AFI20250326BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】移動を行った場合にあって作業開始までの時間短縮を図ること。
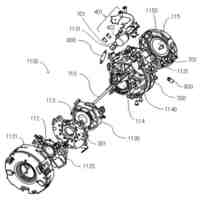
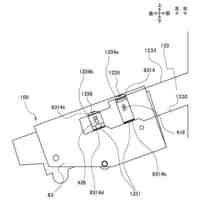
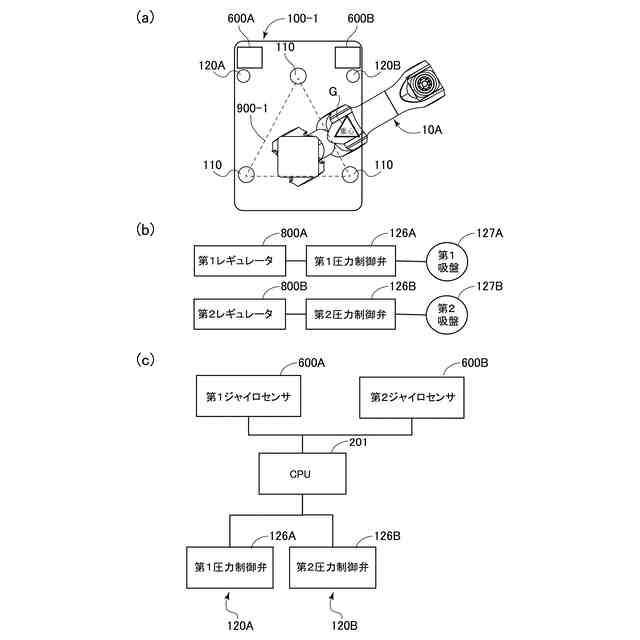
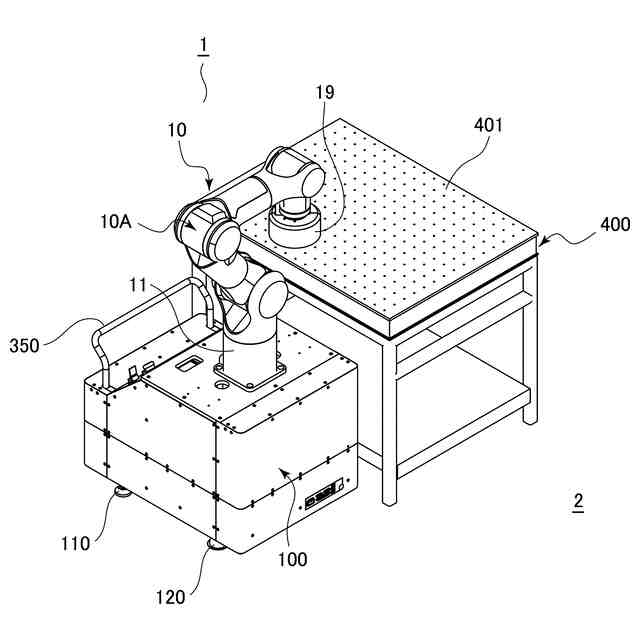
【解決手段】ロボットシステムは、ロボット(10A)を備える。また、ロボットシステムは、床または地面に接地可能な複数の脚(110,120)と、ロボット(10A)が設置される設置部と、を有し、床または地面に対して移動可能な移動架台(100)と、を備える。複数の脚(110,120)のうちの少なくとも1つは、ロボット(10A)の状態に応じて複数の脚(110,120)と床または地面との間における固定保持力を変化させる保持力変更部を有する。
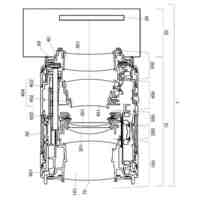
【選択図】図10
特許請求の範囲
【請求項1】
ロボットと、
床または地面に接地可能な複数の脚と、前記ロボットが設置される設置部と、を有し、床または地面に対して移動可能な移動架台と、を備え、
前記複数の脚のうちの少なくとも1つは、前記ロボットの状態に応じて前記複数の脚と床または地面との間における固定保持力を変化させる保持力変更部を有する、
ことを特徴とするロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記移動架台は、前記複数の脚を支持するフレーム部を有し、
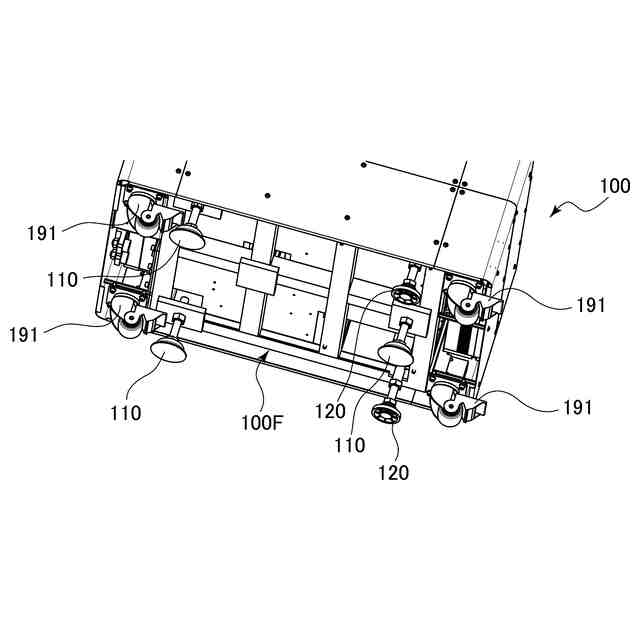
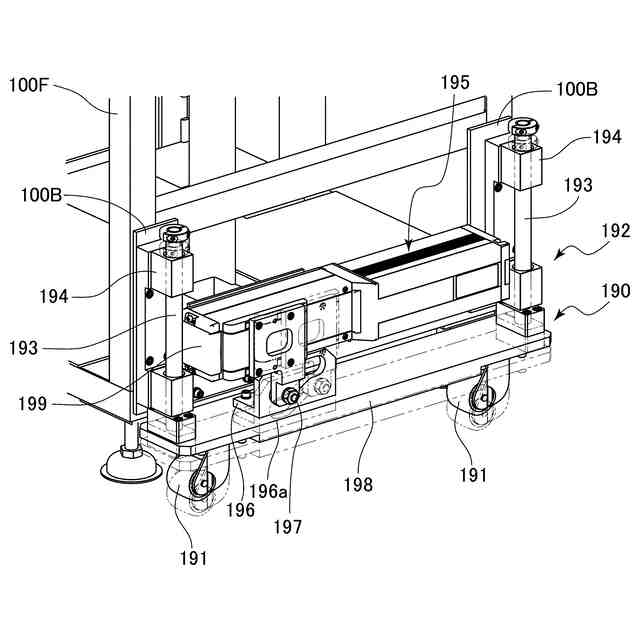
前記複数の脚は、前記フレーム部に対して上下方向の長さが不変な固定脚と、前記フレーム部に対して前記上下方向の長さが可変な可動脚と、を含む、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項3】
前記保持力変更部は、前記可動脚に設けられた、
ことを特徴とする請求項2に記載のロボットシステム。
【請求項4】
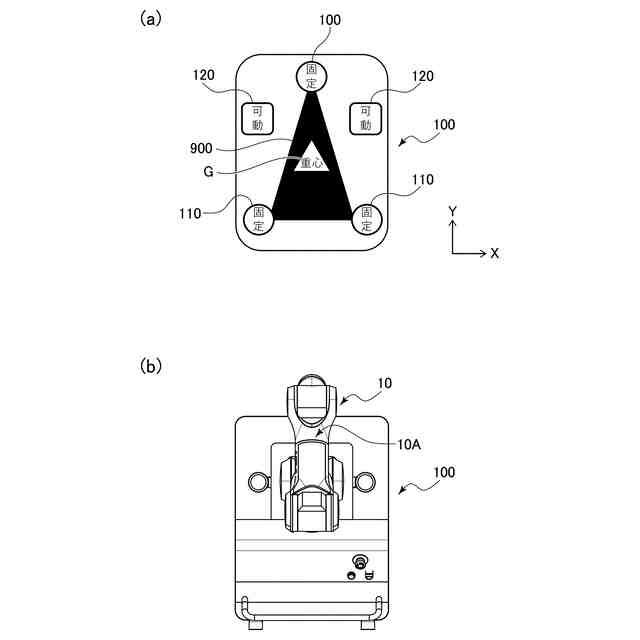
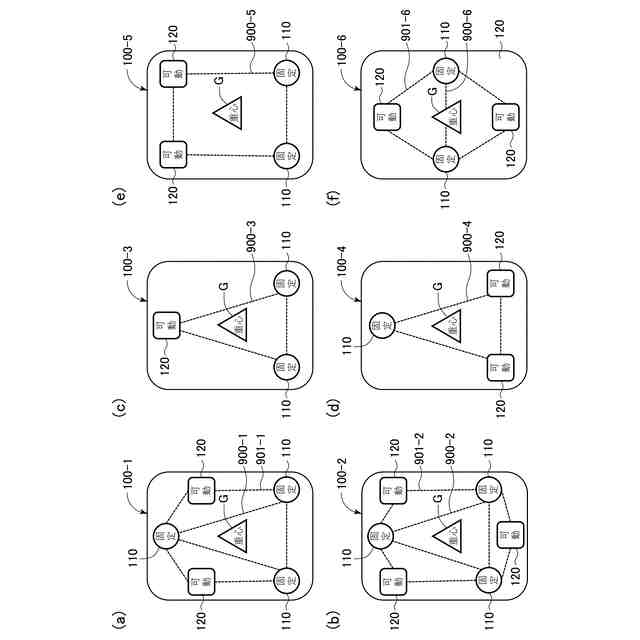
前記複数の脚は、前記固定脚を3以上含み、かつ前記可動脚を2以上含み、
前記上下方向からみて、3以上の前記固定脚を頂点として線で結んだ図形の内側に前記設置部が配置され、
2以上の前記可動脚は、前記図形の外側に配置された、
ことを特徴とする請求項3に記載のロボットシステム。
【請求項5】
前記保持力変更部における前記固定保持力の大きさを制御する制御部を備える、
ことを特徴とする請求項1に記載のロボットシステム。
【請求項6】
前記保持力変更部は、エアにより床または地面に対する吸着力を変更することで前記固定保持力の大きさを変更するエア吸着部である、
ことを特徴とする請求項5に記載のロボットシステム。
【請求項7】
前記保持力変更部は、磁力により床または地面に対する吸着力を変更することで前記固定保持力の大きさを変更する磁力吸着部である、
ことを特徴とする請求項5に記載のロボットシステム。
【請求項8】
前記保持力変更部は、剛性を変更することで前記固定保持力の大きさを変更するエアシリンダである、
ことを特徴とする請求項5に記載のロボットシステム。
【請求項9】
前記ロボットの位置及び姿勢に応じて変化する前記移動架台の状態変化を検知する検知部を備え、
前記制御部は、前記検知部による検知結果に応じて前記保持力変更部における前記固定保持力の大きさを制御する、
ことを特徴とする請求項6に記載のロボットシステム。
【請求項10】
前記検知部は、前記ロボットの位置及び姿勢に応じて変化する前記移動架台における重心位置を検知し、
前記制御部は、前記検知部により検知される前記重心位置の変化に応じて前記保持力変更部における前記固定保持力の大きさを制御する、
ことを特徴とする請求項9に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステム、ロボットシステムの制御方法、移動架台、移動架台の制御方法、物品の製造方法、プログラム、記録媒体に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば少量生産を行う工場等では、生産を行うロボット装置を床に設置してしまうと、製造ラインで複数のロボット装置が必要となり、かつそれらのロボット装置の稼働時間が短いものになるという問題がある。そのため、ロボット装置を移動可能にして、各所で作業を行うことで稼働時間を増やし、かつロボット装置の台数を減じて、コストダウンを図ることが望まれる。しかしながら、ロボット装置を移動する場合は、移動した先でロボット装置を安定させないと、高精度の作業が実行できないという問題がある。そこで、移動可能なロボット装置にあって、ロボット装置を搭載した架台を安定させるための構造が種々提案されている(特許文献1,2,3参照)。
【0003】
即ち、上記特許文献1では、ロボット本体を搭載した架台に、キャスタを備えた伸縮可能なアジャスタアームを有するものが提案されている。また、上記特許文献2では、床に固定された作業机にクランプを用いて架台を固定するものが提案されている。また、上記特許文献3では、床に差し込み孔を設けて置き、その差し込み孔に位置決めピンを差し込むことで架台を固定するものが提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-91213号公報
特開2013-166197号公報
特開2020-82233号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1のようにアジャスタを手動で調整して架台を固定するものは、その固定に時間がかかり、ロボット装置の設置に時間がかかるという問題がある。また、特許文献2のように作業机に対してクランプで手動により架台を固定するものも、その固定に時間がかかり、ロボット装置の設置に時間がかかるという問題がある。また、特許文献3のように差し込み孔にピンを差し込んで架台を固定するものも、架台と差し込み孔との高精度な位置合わせに時間がかかり、ロボット装置の設置に時間がかかるという問題がある。そして、これらの特許文献1~3のものでは、架台を床に対して強固に固定しようとしているが、ロボット本体を床に固定するほどに強固には固定できず、ロボットアームの動作で架台に振動が発生してしまう。そのため、ロボット装置により高精度な作業を行うためには、設置してから作業の教示等にも時間をかける必要が生じてしまうという問題がある。
【0006】
そこで本発明は、移動を行った場合にあって作業開始までの時間短縮を図ることが可能なロボットシステム、ロボットシステムの制御方法、移動架台、移動架台の制御方法、物品の製造方法、プログラム、記録媒体を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様は、ロボットと、床または地面に接地可能な複数の脚と、前記ロボットが設置される設置部と、を有し、床または地面に対して移動可能な移動架台と、を備え、前記複数の脚のうちの少なくとも1つは、前記ロボットの状態に応じて前記複数の脚と床または地面との間における固定保持力を変化させる保持力変更部を有する、ことを特徴とするロボットシステムである。
【0008】
本発明の一態様は、ロボットと、床または地面に接地可能な複数の脚と、前記ロボットが設置される設置部と、を有し、床または地面に対して移動可能な移動架台と、制御部と、を備え、前記複数の脚のうちの少なくとも1つは、前記複数の脚と床または地面との間における固定保持力を変化させる保持力変更部を有する、ロボットシステムの制御方法において、前記制御部が、前記ロボットの状態に応じて前記保持力変更部における前記固定保持力の大きさを制御する保持力変更工程を備えた、ことを特徴とするロボットシステムの制御方法である。
【0009】
本発明の一態様は、ロボットが設置され、かつ床または地面に対して移動可能な移動架台であって、床または地面に接地可能な複数の脚を備え、前記複数の脚のうちの少なくとも1つは、前記ロボットの状態に応じて前記複数の脚と床または地面との間における固定保持力を変化させる保持力変更部を有する、ことを特徴とする移動架台である。
【0010】
本発明の一態様は、床または地面に接地可能な複数の脚と、ロボットが設置される設置部と、を備え、床または地面に対して移動可能であり、前記複数の脚のうちの少なくとも1つは前記複数の脚と床または地面との間における固定保持力を変化させる保持力変更部を有し、制御部によって制御される移動架台の制御方法において、前記制御部が、前記ロボットの状態に応じて前記保持力変更部における前記固定保持力の大きさを制御する保持力変更工程を備えた、ことを特徴とする移動架台の制御方法である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
光学機器
3日前
キヤノン株式会社
光学機器
3日前
キヤノン株式会社
光学機器
4日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
通信装置
3日前
キヤノン株式会社
情報処理装置
2日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
光電変換装置
3日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
電子部品および機器
3日前
キヤノン株式会社
制御装置および制御方法
2日前
キヤノン株式会社
TDC装置および測距装置
2日前
キヤノン株式会社
ズームレンズ及び撮像装置
3日前
キヤノン株式会社
ズームレンズおよび撮像装置
2日前
キヤノン株式会社
画像読取装置、画像形成装置
2日前
キヤノン株式会社
情報提供システム、及び方法
3日前
キヤノン株式会社
細胞剥離装置及び細胞剥離方法
2日前
キヤノン株式会社
検査装置、検査装置の制御方法
4日前
キヤノン株式会社
画像形成装置及びカートリッジ
2日前
キヤノン株式会社
シート給送装置及び画像形成装置
2日前
キヤノン株式会社
撮像装置、及び撮像装置の設定方法
2日前
キヤノン株式会社
情報処理装置、制御方法、プログラム
2日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
3日前
キヤノン株式会社
システム、制御方法、およびプログラム
2日前
キヤノン株式会社
決定方法、情報処理装置及びプログラム
2日前
キヤノン株式会社
情報処理装置、制御方法及びプログラム
2日前
キヤノン株式会社
レンズ鏡筒、交換レンズ、及び撮像装置
3日前
キヤノン株式会社
印刷装置、その制御方法及びプログラム
2日前
キヤノン株式会社
管理システム、管理方法およびプログラム
2日前
キヤノン株式会社
レンズ駆動機構、レンズ装置及び撮像装置
3日前
キヤノン株式会社
管理システム、管理方法およびプログラム
2日前
キヤノン株式会社
システム、情報処理装置及びその制御方法
2日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ