TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025051104
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023160028
出願日
2023-09-25
発明の名称
情報処理装置、制御方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/00 20240101AFI20250328BHJP(制御;調整)
要約
【課題】同一時刻に同一物体を観測していない場合においてもセンサー間の同期ずれを検知可能とすることである。
【解決手段】情報処理装置は、移動体に配置された複数のセンサーからなるセンサー群の各センサーのセンサー特性、並びに前記各センサーのセンサー間の相対位置及び相対姿勢情報を取得するセンサーパラメータ取得手段と、前記各センサーによって複数の時刻で取得された観測情報群を取得する観測情報取得手段と、計測点情報として、前記複数の時刻における前記各センサーの速度と位置の組、及び角速度と姿勢の組の少なくとも一方を取得する計測点情報取得手段と、前記センサー特性、前記センサー間の相対位置及び姿勢、前記観測情報群、前記計測点情報に基づいて、前記各センサーの前記複数の時刻での相対関係を算出する観測時刻補正量算出手段と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動体に配置された複数のセンサーからなるセンサー群の各センサーのセンサー特性、並びに前記各センサーのセンサー間の相対位置及び相対姿勢情報を取得するセンサーパラメータ取得手段と、
前記各センサーによって複数の時刻で取得された観測情報群を取得する観測情報取得手段と、
計測点情報として、前記複数の時刻における前記各センサーの速度と位置の組、及び角速度と姿勢の組の少なくとも一方を取得する計測点情報取得手段と、
前記センサー特性、前記センサー間の相対位置及び姿勢、前記観測情報群、前記計測点情報に基づいて、前記各センサーの前記複数の時刻での相対関係を算出する観測時刻補正量算出手段と、
を備えることを特徴とする情報処理装置。
続きを表示(約 1,400 文字)
【請求項2】
前記観測時刻補正量算出手段は、前記観測情報群において、前記センサー群のうちの複数のセンサーによってそれぞれ1つ以上の時刻で観測されている共通の特徴を1つ以上検出し、前記検出した共通の特徴の観測情報の位置の整合性がより高くなるセンサーの前記複数の時刻での相対関係を算出する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記共通の特徴は三次元位置情報を持つ環境中の特徴点であり、
前記観測時刻補正量算出手段は、前記特徴点の前記三次元位置情報を前記観測情報群における前記各センサーの前記観測情報上に投影した位置と、前記観測情報群において観測している前記特徴点の位置との誤差が小さい場合に前記観測情報の整合性が高いと評価することを特徴とする請求項2に記載の情報処理装置。
【請求項4】
前記観測情報群は、各々画像を含み、前記共通の特徴は、環境中の物体の同一の点を捉えた各画像上の特徴点である
ことを特徴とする請求項2に記載の情報処理装置。
【請求項5】
前記共通の特徴は、環境中に設置され前記センサー群の各センサーにより相互に区別して検出することが可能な1つ以上のマーカーである
ことを特徴とする請求項2に記載の情報処理装置。
【請求項6】
前記観測時刻補正量算出手段は、前記計測点情報及び前記各センサーの前記複数の時刻での相対関係の候補を設定し、前記設定した候補に基づいて前記観測情報群を取得した際の前記各センサーの位置、及び姿勢の少なくとも一方の補正値を算出し、前記算出した補正値に基づいて前記観測情報の整合性を評価する
ことを特徴とする請求項2に記載の情報処理装置。
【請求項7】
移動体に配置された複数のセンサーからなるセンサー群の各センサーのセンサー特性、並びに前記各センサーのセンサー間の相対位置及び相対姿勢情報を取得するセンサーパラメータ取得工程と、
前記各センサーによって複数の時刻で取得された観測情報群を取得する観測情報取得工程と、
計測点情報として、前記複数の時刻における前記各センサーの速度と位置の組、及び角速度と姿勢の組の少なくとも一方を取得する計測点情報取得工程と、
前記センサー特性、前記センサー間の相対位置及び姿勢、前記観測情報群、前記計測点情報に基づいて、前記各センサーの前記複数の時刻での相対関係を算出する観測時刻補正量算出工程と、
を備えることを特徴とする制御方法。
【請求項8】
コンピュータを、
移動体に配置された複数のセンサーからなるセンサー群の各センサーのセンサー特性、並びに前記各センサーのセンサー間の相対位置及び相対姿勢情報を取得するセンサーパラメータ取得手段、
前記各センサーによって複数の時刻で取得された観測情報群を取得する観測情報取得手段、
計測点情報として、前記複数の時刻における前記各センサーの速度と位置の組、及び角速度と姿勢の組の少なくとも一方を取得する計測点情報取得手段、及び
前記センサー特性、前記センサー間の相対位置及び姿勢、前記観測情報群、前記計測点情報に基づいて、前記各センサーの前記複数の時刻での相対関係を算出する観測時刻補正量算出手段、
として機能させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、制御方法及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
工場や物流倉庫における無人搬送車(AGV)の制御や、VR等で使用されるHMDの位置姿勢推定に使用する技術として、LiDARやカメラをセンサーとして使用したSLAM技術が知られている。AGVは、Automated Guided Vehicleの略称である。VRは、Virtual Realityの略称である。HMDは、Head Mounted Displayの略称である。LiDARは、Laser Imaging Detection and Rangingの略称である。SLAMは、Simultaneous Localization and Mappingの略称である。
【0003】
また、複数のセンサーを同時に使用して周囲環境の観測範囲を拡大し、位置姿勢推定の精度を向上させる手法も知られている。これらの手法では、複数のセンサーを精度高く同期させることが位置姿勢推定の精度向上のために重要である。例えば特許文献1では、複数カメラによりほぼ同時に撮影された画像から重複視野内の同一物体を検出し、その検出位置からカメラ間の同期ずれを検知し、検知した場合に同期処理を実行する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-205498号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された方法は、複数カメラの視野が重複していることを前提とし、同一時刻に同一物体を撮影しなければカメラ間の同期ずれを検知できず、従って同期処理も実行できない問題があった。
【0006】
本発明は、同一時刻に同一物体を観測していない場合においてもセンサー間の同期ずれを検知可能とすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の一実施形態の情報処理装置は、移動体に配置された複数のセンサーからなるセンサー群の各センサーのセンサー特性、並びに前記各センサーのセンサー間の相対位置及び相対姿勢情報を取得するセンサーパラメータ取得手段と、前記各センサーによって複数の時刻で取得された観測情報群を取得する観測情報取得手段と、計測点情報として、前記複数の時刻における前記各センサーの速度と位置の組、及び角速度と姿勢の組の少なくとも一方を取得する計測点情報取得手段と、前記センサー特性、前記センサー間の相対位置及び姿勢、前記観測情報群、前記計測点情報に基づいて、前記各センサーの前記複数の時刻での相対関係を算出する観測時刻補正量算出手段と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、同一時刻に同一物体を観測していない場合においてもセンサー間の同期ずれを検知することができる。
【図面の簡単な説明】
【0009】
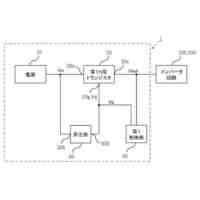
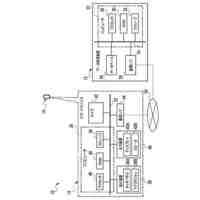
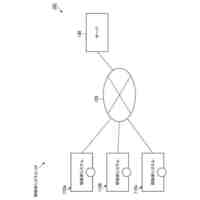
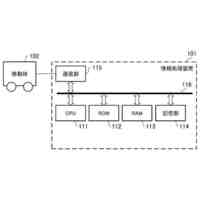
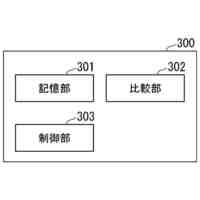
本発明の第1の実施形態に係る情報処理装置の構成を示すブロック図である。
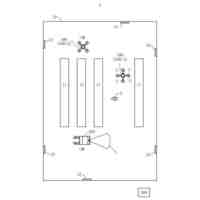
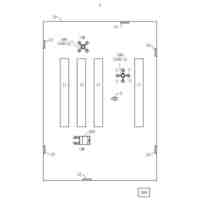
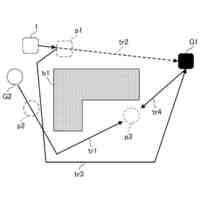
本発明の第1の実施形態に係る情報処理装置の利用シーンを説明する図である。
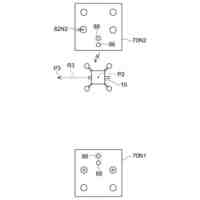
本発明の第1の実施形態における同期ずれの影響を示す図である。
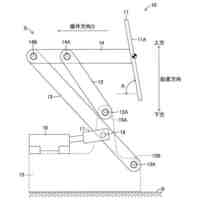
本発明の第1の実施形態における同期ずれの補正方法を示す図である。
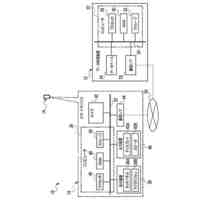
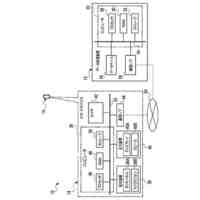
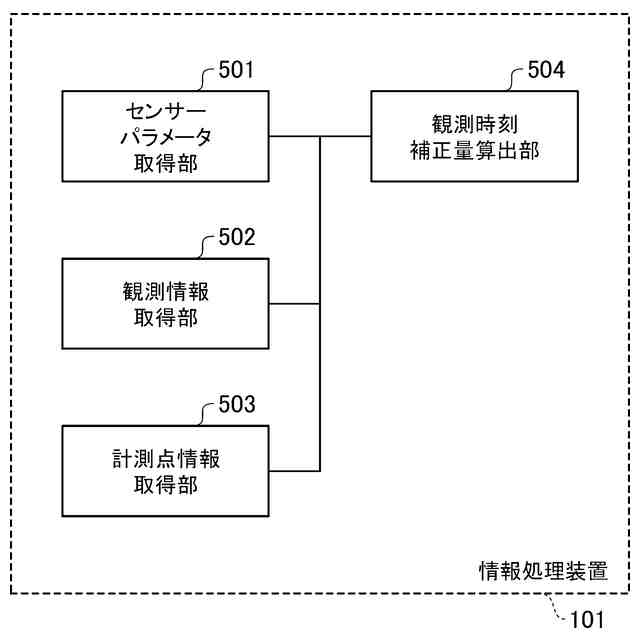
本発明の第1の実施形態に係る情報処理装置の機能的構成を示すブロック図である。
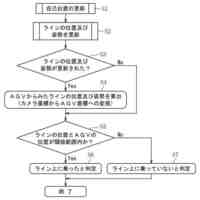
本発明の第1の実施形態に係る情報処理方法の流れを示すフローチャート図である。
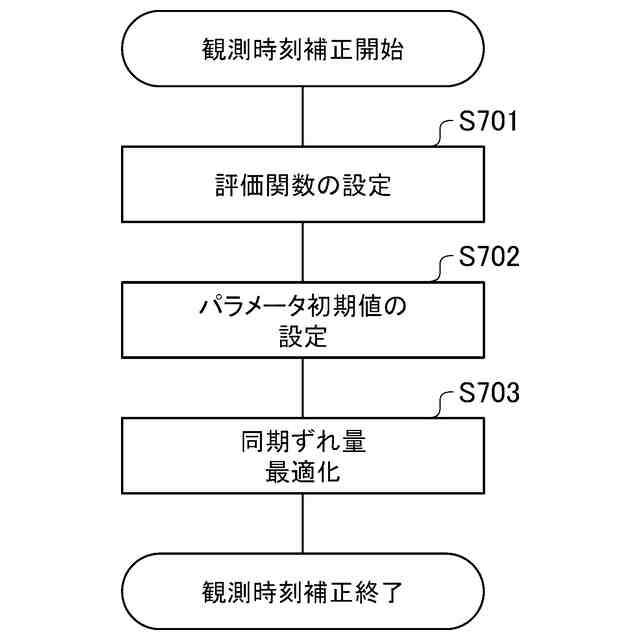
本発明の第1の実施形態における観測時刻補正処理の流れの詳細を示すフローチャート図である。
本発明の第2の実施形態における同期ずれの影響を示す図である。
本発明の第2の実施形態における同期ずれの補正方法を示す図である。
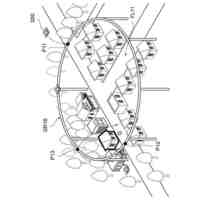
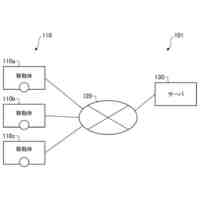
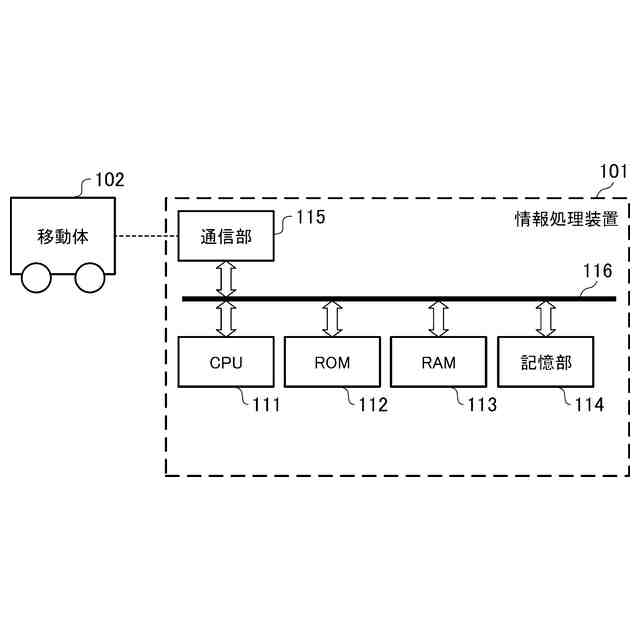
本発明の第3の実施形態に係る移動体システムの構成を示す図である。
本発明の第3の実施形態に係る情報処理装置の機能的構成を示すブロック図である。
本発明の第3の実施形態に係る情報処理方法の流れを示すフローチャート図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態を、図面を参照して詳細に説明する。尚、以下の実施の形態は本発明の特許請求の範囲を限定するものではなく、また以下の実施の形態で説明されている特徴の組み合わせの全てが本発明を構成する上で必須のものとは限らない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
3日前
株式会社ダイフク
搬送車
3日前
ローム株式会社
半導体集積回路
8日前
トヨタ自動車株式会社
工作機械の制御装置
1日前
トヨタ自動車株式会社
工作機械の制御装置
2日前
株式会社ダイフク
物品搬送設備
1日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ローム株式会社
バイアス回路
2日前
オルガノ株式会社
運転管理方法及び運転管理装置
3日前
ダイハツ工業株式会社
無人搬送車の制御方法
1日前
ローム株式会社
電源起動監視回路
1日前
ローム株式会社
レギュレータ回路
7日前
新電元工業株式会社
レギュレータ回路及びインバータ回路
6日前
ソフトバンクグループ株式会社
システム
7日前
ソフトバンクグループ株式会社
システム
3日前
ソフトバンクグループ株式会社
システム
7日前
ソフトバンクグループ株式会社
システム
7日前
三菱ロジスネクスト株式会社
防衛システム
7日前
トヨタ自動車株式会社
車両用ペダル装置
7日前
三菱ロジスネクスト株式会社
防衛システム
7日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
1日前
三共木工株式会社
遠隔操作システム、遠隔操作装置、及び遠隔操作対象
6日前
有限会社村上不動産鑑定士事務所
無人航空機管理システム
6日前
キヤノン株式会社
情報処理装置、制御方法及びプログラム
6日前
株式会社日立製作所
状態検知装置
2日前
ローム株式会社
半導体装置、電源装置、および車両
6日前
ローム株式会社
制御装置、コントローラおよび電子制御装置
8日前
日本電気株式会社
電力変換器、処理システム、処理方法、およびプログラム
1日前
キヤノン株式会社
情報処理方法、情報処理システムおよびプログラム
1日前
本田技研工業株式会社
制御システム、制御方法、およびプログラム
2日前
株式会社東芝
半導体装置
6日前
キヤノン株式会社
移動体、移動体の制御方法、及びコンピュータプログラム
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ