TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025047364
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023155818
出願日
2023-09-21
発明の名称
防衛システム
出願人
三菱ロジスネクスト株式会社
代理人
弁理士法人みのり特許事務所
主分類
G05D
1/43 20240101AFI20250326BHJP(制御;調整)
要約
【課題】工場または倉庫等の作業領域に侵入した侵入者を撮影することが可能な防衛システムを提供する。
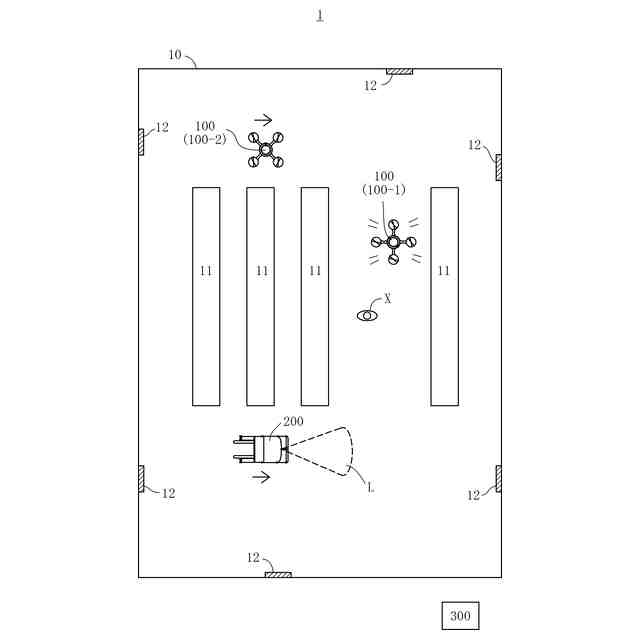
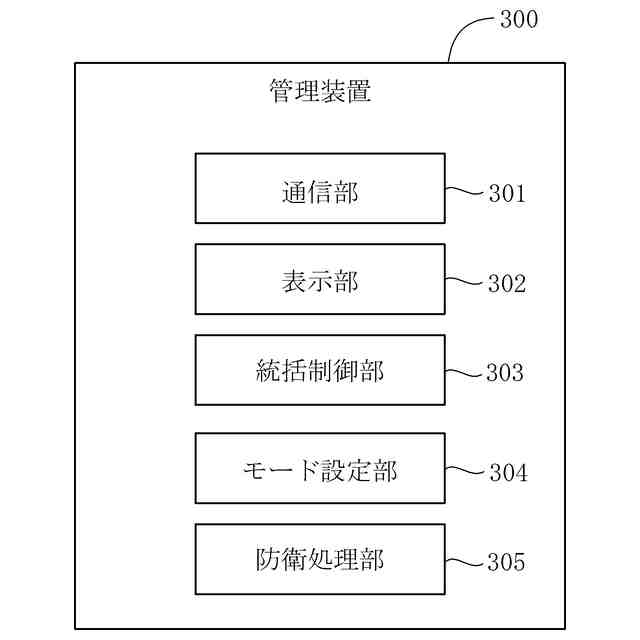
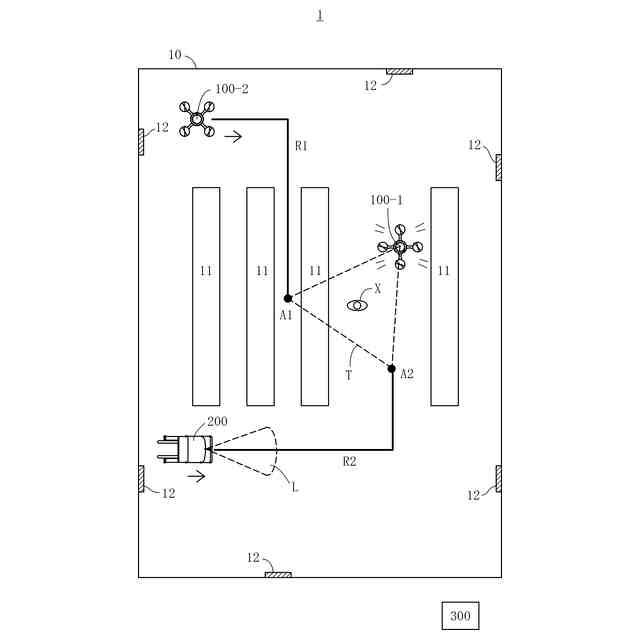
【解決手段】第1無人飛行体100-1および第2無人飛行体100-2と、移動体200と、管理装置300とを備える防衛システム1であって、第1無人飛行体100-1は、作業領域10に侵入した侵入者Xを検知するための検知部を備え、第2無人飛行体100-2は、侵入者Xを撮影するための撮影部を備え、移動体200は、侵入者Xの視界を遮るための幻惑光Lを出力する照明部を備え、管理装置300は、第1無人飛行体100-1が侵入者Xを検知した場合、第2無人飛行体100-2が侵入者Xを撮影するまでの間、移動体200に幻惑光Lを出力させることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
所定の作業領域において空中停止可能な第1無人飛行体および第2無人飛行体と、
前記作業領域において移動する移動体と、
前記第1無人飛行体、前記第2無人飛行体および前記移動体を制御する管理装置と、
を備える防衛システムであって、
前記第1無人飛行体は、
前記作業領域に侵入した侵入者を検知するための検知部を備え、
前記第2無人飛行体は、
前記侵入者を撮影するための撮影部を備え、
前記移動体は、
前記侵入者の視界を遮るための幻惑光を出力する照明部を備え、
前記管理装置は、
前記第1無人飛行体の前記検知部が前記侵入者を検知した場合、前記第2無人飛行体の前記撮影部が前記侵入者を撮影するまでの間、前記移動体の前記照明部に前記幻惑光を出力させる
ことを特徴とする防衛システム。
続きを表示(約 1,100 文字)
【請求項2】
前記移動体の前記照明部は、
前記幻惑光として、所定の周期で点灯と消灯とを繰り返す点滅光を出力し、
前記管理装置は、
前記点灯および前記消灯の少なくとも一方のタイミングで、前記第2無人飛行体の前記撮影部に前記侵入者を撮影させる
ことを特徴とする請求項1に記載の防衛システム。
【請求項3】
前記管理装置は、
前記第1無人飛行体の前記検知部が前記侵入者を検知した場合、
前記第2無人飛行体が前記侵入者に近づくための第1移動経路と、前記移動体が前記侵入者に近づくための第2移動経路とを決定し、
前記第1移動経路の終着点と前記侵入者との間には、前記第2無人飛行体よりも大きな障害物が存在する
ことを特徴とする請求項1に記載の防衛システム。
【請求項4】
前記管理装置は、
前記作業領域を平面視した場合、前記第1無人飛行体、前記第1移動経路の終着点および前記第2移動経路の終着点を頂点とする三角形の領域に、前記侵入者が存在するという条件を満たすように、前記第1移動経路および前記第2移動経路を決定する
ことを特徴とする請求項3に記載の防衛システム。
【請求項5】
前記管理装置は、
前記第2無人飛行体の前記撮影部が前記侵入者を撮影した後も、前記移動体の前記照明部に前記幻惑光を出力させる
ことを特徴とする請求項1に記載の防衛システム。
【請求項6】
前記移動体は、フォークを備えるフォークリフトであり、
前記管理装置は、
前記フォークリフトの前記照明部に前記幻惑光を出力させるとともに、所定のタイミングで前記フォークの昇降動作を行わせる
ことを特徴とする請求項1に記載の防衛システム。
【請求項7】
前記移動体は、空中停止可能な第3無人飛行体である
ことを特徴とする請求項1に記載の防衛システム。
【請求項8】
所定の作業領域において空中停止可能な無人飛行体と、
前記作業領域において移動する移動体と、
前記無人飛行体および前記移動体を制御する管理装置と、
を備える防衛システムであって、
前記無人飛行体は、
前記作業領域に侵入した侵入者を撮影するための撮影部を備え、
前記移動体は、
前記侵入者の視界を遮るための幻惑光を出力する照明部を備え、
前記管理装置は、
前記無人飛行体が前記侵入者に向かって飛行している間および前記無人飛行体の前記撮影部が前記侵入者を撮影している間、前記移動体の前記照明部に前記幻惑光を出力させる
ことを特徴とする防衛システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人飛行体を用いた防衛システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、工場または倉庫等の作業領域において、ドローンと称する無人飛行体が用いられている。例えば、特許文献1には、オペレータが操作する有人搬送車と、空中停止可能な一台の無人飛行体と、無人飛行体を制御する管理装置と、を備える誘導システムが記載されている。
【0003】
特許文献1に記載の誘導システムにおいて、無人飛行体は、路面に対して誘導画像を投影するプロジェクタを備えている。誘導画像は、例えば、特定した方向を指し示す矢印が表示されており、有人搬送車の前方の路面に投影される。これにより、有人搬送車を操作中のオペレータは、誘導画像を確認することで、荷役位置に誘導される。
【0004】
また近年では、有人搬送車の替わりに無人搬送車を用いて無人化することで、労働負荷を低減することができる無人搬送システムの普及が進んでいる。しかしながら、工場または倉庫等の作業領域において無人化したシステムを採用する場合、当該作業領域に無断で侵入した人物(以下、侵入者という。)によって、作業領域の棚等に保管されている荷物が盗まれたり壊されたりするおそれがある。この点、侵入者を撮影することができれば、侵入者の特定につながり、ひいては侵入の抑止効果が期待でき、荷物を防衛することができる。
【先行技術文献】
【特許文献】
【0005】
特開2020-52629号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は上記事情に鑑みてなされたものであって、その課題とするところは、工場または倉庫等の作業領域に侵入した侵入者を撮影することが可能な防衛システムを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の一実施形態に係る防衛システムは、
所定の作業領域において空中停止可能な第1無人飛行体および第2無人飛行体と、
前記作業領域において移動する移動体と、
前記第1無人飛行体、前記第2無人飛行体および前記移動体を制御する管理装置と、
を備える防衛システムであって、
前記第1無人飛行体は、
前記作業領域に侵入した侵入者を検知するための検知部を備え、
前記第2無人飛行体は、
前記侵入者を撮影するための撮影部を備え、
前記移動体は、
前記侵入者の視界を遮るための幻惑光を出力する照明部を備え、
前記管理装置は、
前記第1無人飛行体の前記検知部が前記侵入者を検知した場合、前記第2無人飛行体の前記撮影部が前記侵入者を撮影するまでの間、前記移動体の前記照明部に前記幻惑光を出力させることを特徴とする。
【0008】
この構成では、第2無人飛行体の撮影部が侵入者を撮影するまでの間、移動体の照明部が侵入者の視界を遮るための幻惑光(可視光)を出力することにより、侵入者に第2無人飛行体の存在を気付かせにくくするので、第2無人飛行体が侵入者を撮影することが可能となる。
【0009】
前記防衛システムにおいて、
前記移動体の前記照明部は、
前記幻惑光として、所定の周期で点灯と消灯とを繰り返す点滅光を出力し、
前記管理装置は、
前記点灯および前記消灯の少なくとも一方のタイミングで、前記第2無人飛行体の前記撮影部に前記侵入者を撮影させるよう構成できる。
【0010】
前記防衛システムにおいて、
前記管理装置は、
前記第1無人飛行体の前記検知部が前記侵入者を検知した場合、
前記第2無人飛行体が前記侵入者に近づくための第1移動経路と、前記移動体が前記侵入者に近づくための第2移動経路とを決定し、
前記第1移動経路の終着点と前記侵入者との間には、前記第2無人飛行体よりも大きな障害物が存在することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
17日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
20日前
スター精密株式会社
工作機械
1か月前
ローム株式会社
半導体集積回路
25日前
株式会社ダイフク
搬送車
20日前
エイブリック株式会社
ボルテージレギュレータ
17日前
トヨタ自動車株式会社
工作機械の制御装置
19日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社やまびこ
走行制御装置
5日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
株式会社ダイフク
物品搬送設備
18日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
株式会社ダイヘン
搬送車
17日前
チームラボ株式会社
走行システム及び走行路
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
半導体装置
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
株式会社デンソー
診断装置
3日前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
井関農機株式会社
作業車両
13日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































