TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025031010
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136938
出願日
2023-08-25
発明の名称
自律走行装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250228BHJP(制御;調整)
要約
【課題】自律走行を高い信頼性をもって維持することができる自律走行装置を提供する。
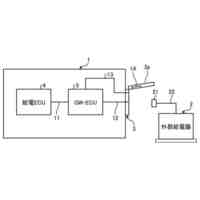
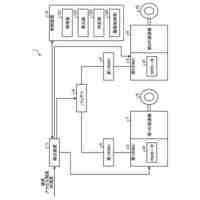
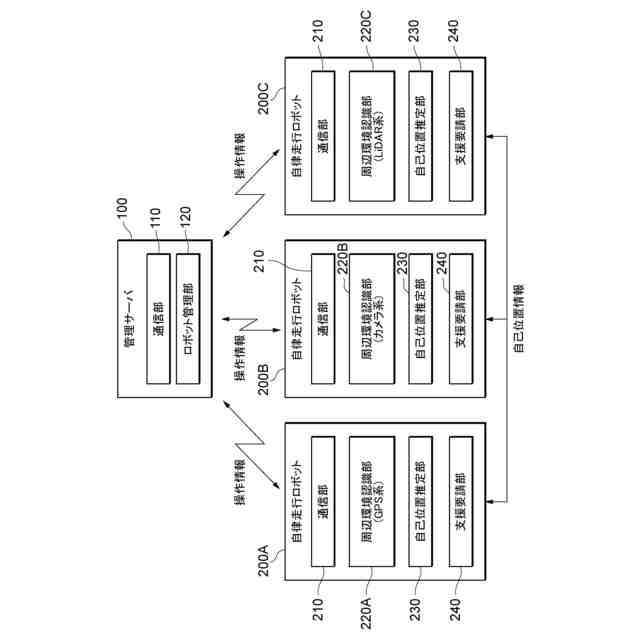
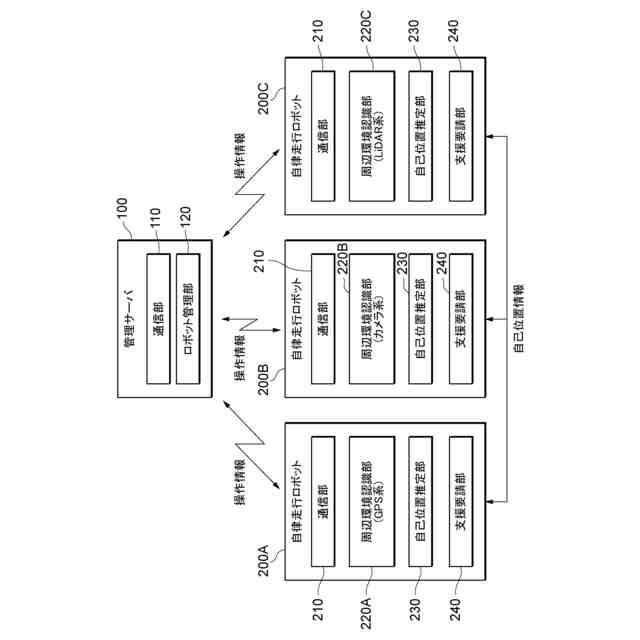
【解決手段】周辺環境を認識する周辺環境認識部220A,220B,220Cと、周辺環境認識部により認識された周辺環境に基づいて、自己位置を推定する自己位置推定部230と、自己位置推定部が自己位置を喪失した場合、過去の自らの自己位置の喪失時に支援実績のある他の自律走行装置200A,200B,200Cを特定し、特定した他の自律走行ロボットに対し自己位置に関する情報、および、他の自律走行ロボットにより認識された他の自律走行ロボットに対する自らの相対位置に関する情報を要求する支援要請部240と、を備え、自己位置推定部は、他の自律走行ロボットの自己位置に関する情報、および、他の自律走行ロボットにより認識された他の自律走行ロボットに対する自らの相対位置に関する情報に基づいて、自らの自己位置に関する情報を補完する。
【選択図】図1
特許請求の範囲
【請求項1】
自律走行装置であって、
周辺環境を認識する周辺環境認識部と、
前記周辺環境認識部により認識された周辺環境に基づいて、自己位置を推定する自己位置推定部と、
前記自己位置推定部が自己位置を喪失した場合、過去の自らの自己位置の喪失時に支援実績のある他の自律走行装置、または、自らとは異なる周辺環境を認識するための構成を有する他の自律走行装置を特定し、前記特定した他の自律走行装置に対し、前記他の自律走行装置の自己位置に関する情報、および、前記他の自律走行装置により認識された前記他の自律走行装置に対する自らの相対位置に関する情報を要求する支援要請部と、
を備え、
前記自己位置推定部は、前記他の自律走行装置の自己位置に関する情報、および、前記他の自律走行装置により認識された前記他の自律走行装置に対する自らの相対位置に関する情報に基づいて、自らの自己位置に関する情報を補完する、
自律走行装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、センサにより計測された障害物の位置と、予め作成された地図上の障害物の位置とを照合することで、自己位置を推定しつつ自律走行を行う自律走行装置が広く知られている。例えば、特許文献1に記載の自律走行装置は、他の自律走行ロボットとの間で互いの自己位置に関する情報を共有することで、自己位置に関する情報の信頼度を向上させるようにしている。
【先行技術文献】
【特許文献】
【0003】
特開2023-53536号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に記載の自律走行装置においては、通信環境の変化等に起因して自己位置を認識できなくなった場合、他の自律走行装置から自己位置に関する情報を取得して補完する必要がある。しかしながら、他の自律走行装置を含めて一斉に自己位置を認識できなくなった場合には、自律走行ロボットの自律走行を維持することが困難となり、その改善が求められていた。
【0005】
本発明は、このような事情に鑑みてなされたものであり、自律走行を高い信頼性をもって維持することができる自律走行装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決する自律走行装置は、周辺環境を認識する周辺環境認識部と、周辺環境認識部により認識された周辺環境に基づいて、自己位置を推定する自己位置推定部と、自己位置推定部が自己位置を喪失した場合、過去の自己位置の喪失時に支援実績のある他の自律走行装置、または、自らとは異なる周辺環境を認識するための構成を有する他の自律走行装置を特定し、特定した他の自律走行装置に対し、他の自律走行装置の自己位置に関する情報、および、他の自律走行装置により認識された他の自律走行装置に対する自らの相対位置に関する情報を要求する支援要請部と、を備え、自己位置推定部は、他の自律走行装置の自己位置に関する情報、および、他の自律走行装置により認識された他の自律走行装置に対する自らの相対位置に関する情報に基づいて、自らの自己位置に関する情報を補完する。
【発明の効果】
【0007】
本発明によれば、自律走行を高い信頼性をもって維持することができる。
【図面の簡単な説明】
【0008】
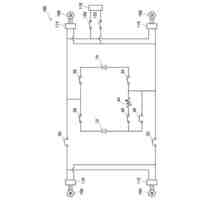
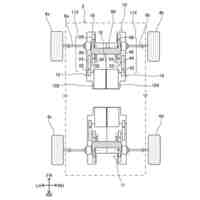
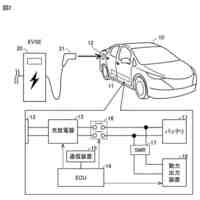
本実施形態に係る自律走行ロボットの周辺構成を示す模式図である。
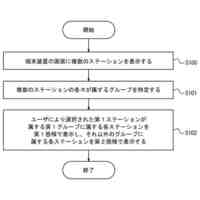
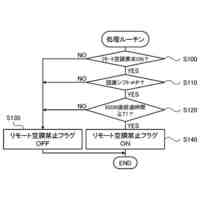
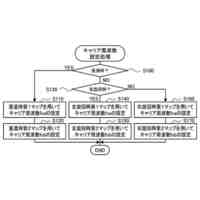
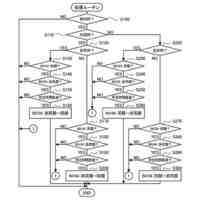
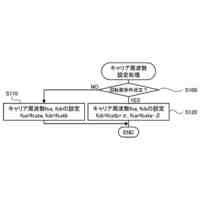
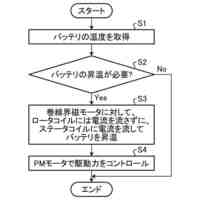
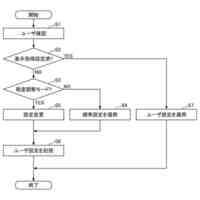
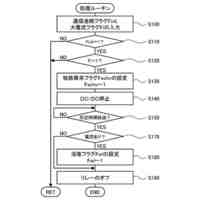
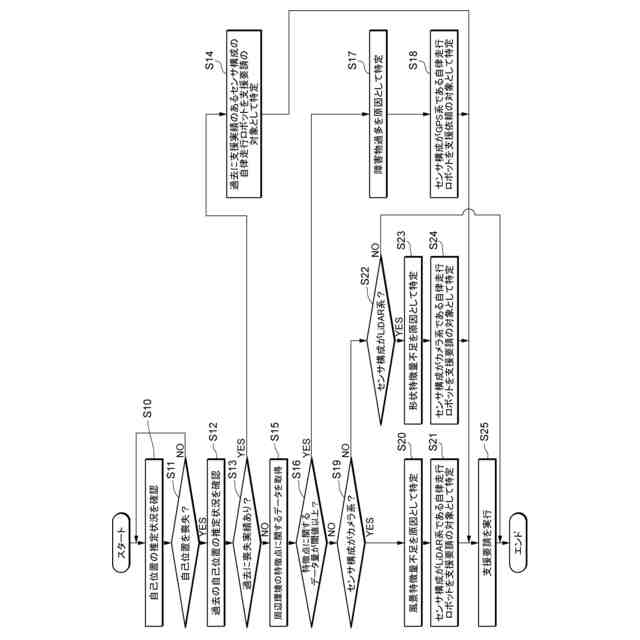
本実施形態に係る自律走行ロボットにより実行される自律走行処理の一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、自律走行装置の一実施形態について、図面を参照して、説明する。
【0010】
図1に示すように、自律走行システムは、例えば、管理サーバ100と、複数(本実施形態では3つ)の自律走行ロボット200A,200B,200Cとを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
1日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
組電池
4日前
トヨタ自動車株式会社
自動車
8日前
トヨタ自動車株式会社
ロータ
15日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
充電器
9日前
トヨタ自動車株式会社
電源装置
今日
トヨタ自動車株式会社
充電装置
今日
トヨタ自動車株式会社
駆動装置
15日前
トヨタ自動車株式会社
二次電池
15日前
トヨタ自動車株式会社
判定装置
10日前
トヨタ自動車株式会社
配車装置
今日
トヨタ自動車株式会社
接合方法
16日前
トヨタ自動車株式会社
蓄電装置
18日前
トヨタ自動車株式会社
蓄電装置
18日前
トヨタ自動車株式会社
二次電池
15日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
表示装置
今日
トヨタ自動車株式会社
駆動装置
15日前
トヨタ自動車株式会社
蓄電セル
16日前
トヨタ自動車株式会社
触媒装置
今日
トヨタ自動車株式会社
電動車両
9日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
電動車両
15日前
トヨタ自動車株式会社
制御装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ