TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025031249
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023137345
出願日
2023-08-25
発明の名称
制御システムおよび制御方法
出願人
日本精工株式会社
代理人
個人
,
個人
主分類
G05B
11/36 20060101AFI20250228BHJP(制御;調整)
要約
【課題】通信遅延に変動が生じる場合にも制御の安定や精度向上を図る。
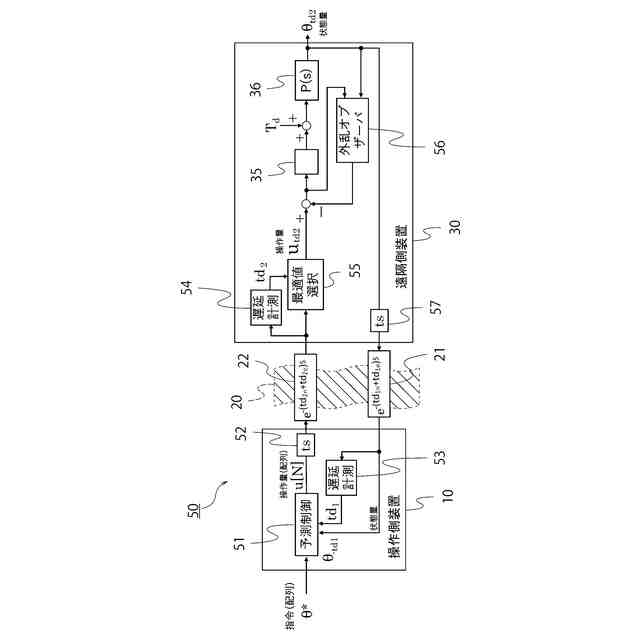
【解決手段】制御システムは、通信網を介して制御対象側へと制御指令値を送信して制御を行い、当該制御指令値として、送信時刻よりも未来の複数時点それぞれについて予測された制御指令値を含んだ集合を用いる予測制御部と、上記通信網の上記制御対象側で上記制御指令値の到達遅延を計測する指令遅延計測部と、上記指令遅延計測部によって計測された上記到達遅延に相当する時点の上記制御指令値を上記集合から選択する指令選択部と、を備える。
【選択図】 図4
特許請求の範囲
【請求項1】
通信網を介して制御対象側へと制御指令値を送信して制御を行い、当該制御指令値として、送信時刻よりも未来の複数時点それぞれについて予測された制御指令値を含んだ集合を用いる予測制御部と、
前記通信網の前記制御対象側で前記制御指令値の到達遅延を計測する指令遅延計測部と、
前記指令遅延計測部によって計測された前記到達遅延に相当する時点の前記制御指令値を前記集合から選択する指令選択部と、
を備える制御システム。
続きを表示(約 900 文字)
【請求項2】
前記予測制御部は、前記制御対象における制御結果が前記通信網経由で反映されてフィードバック制御を行い、
前記通信網の前記予測制御部側で前記制御結果の到達遅延を計測する結果遅延計測部と、
前記結果遅延計測部によって計測された到達遅延分の、前記制御対象における制御状態の変化を、前記制御結果および前記制御指令値から推定して前記予測制御部のフィードバック制御に反映させる状態推測部と、
を更に備える請求項1に記載の制御システム。
【請求項3】
前記指令遅延計測部は、前記制御指令値に付与されたタイムスタンプと受信時刻との比較で到達遅延を計測する請求項1に記載の制御システム。
【請求項4】
前記結果遅延計測部は、前記制御結果に付与されたタイムスタンプと受信時刻との比較で到達遅延を計測する請求項2に記載の制御システム。
【請求項5】
前記通信網の前記制御対象側に設けられ、当該制御対象に対する外乱と当該制御対象のパラメータ誤差とを補償する外乱オブザーバを更に備える請求項1に記載の制御システム。
【請求項6】
前記通信網の前記制御対象側に設けられ、前記制御指令値に前記制御対象を追従させる追従制御部を更に備える請求項1に記載の制御システム。
【請求項7】
前記指令選択部は、前記制御指令値の集合が受信できなかった場合、過去に受信済みの集合から制御指令値を選択する請求項1に記載の制御システム。
【請求項8】
前記予測制御部は、前記制御対象の制御目標に対する制御状態の偏差を減らすように前記制御指令値を決める請求項1に記載の制御システム。
【請求項9】
前記制御目標として、位置、角度、力およびトルクの少なくとも1つが用いられる請求項8に記載の制御システム。
【請求項10】
前記制御指令値として、トルク、力、電流および電圧の少なくとも1つを示す指令値が用いられる請求項1に記載の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システムおよび制御方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、次世代移動通信システムの技術開発はモバイル用途に加えて産業用途に拡大しつつある。次世代移動通信システムは超高速大容量、多数同時接続、超高信頼低遅延の3つの特徴が提唱されているが、IoT(Internet of Things)端末の遠隔モーションコントロールを実現するためには低遅延が特に重要となる。
【0003】
低遅延が実現された場合であっても、通信遅延は一定ではなく常時変動するため、通信遅延の変動に対応する技術が求められる。
例えば特許文献1には、スミス予測器で通信遅延を補償する制御システムが提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-9740号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
通信事業社は変動を含めた通信遅延量を予測する技術を持っているため、特許文献1のスミス予測器に、予測された通信遅延を適用することができる。しかしながら、一般企業などの場合には、通信遅延変動を含めた正確な通信遅延の予測ができない。
このため、特許文献1の技術では、通信遅延の変動によって制御の不安定化を生じる虞や、遅延変動と外乱などの重畳によって定常偏差を生じる虞がある。なお、特許文献1の技術はフィードバック制御の技術であるが、通信遅延の変動に伴う不安定化や定常偏差はフィードフォワード制御の場合にも生じ虞がある。
【0006】
そこで、本発明は、通信遅延に変動が生じる場合にも制御の安定や精度向上を図ることを課題とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の1つの態様に係る制御システムは、通信網を介して制御対象側へと制御指令値を送信して制御を行い、当該制御指令値として、送信時刻よりも未来の複数時点それぞれについて予測された制御指令値を含んだ集合を用いる予測制御部と、上記通信網の上記制御対象側で上記制御指令値の到達遅延を計測する指令遅延計測部と、上記指令遅延計測部によって計測された上記到達遅延に相当する時点の上記制御指令値を上記集合から選択する指令選択部と、を備える。
【0008】
このような制御システムによれば、計測された到達遅延に応じた制御指令値によって制御対象が制御されるため、遅延に変動が生じた場合であっても適切な制御指令値による制御が実現し、制御の安定や精度向上が図られる。
上記制御システムにおいて、上記予測制御部は、上記制御対象における制御結果が上記通信網経由で反映されてフィードバック制御を行い、上記通信網の上記予測制御部側に設けられ、上記制御結果の到達遅延を計測する結果遅延計測部と、上記結果遅延計測部によって計測された到達遅延分の、上記制御対象における制御状態の変化を、上記制御結果および上記制御指令値から推定して上記予測制御部のフィードバック制御に反映させる状態推測部と、を更に備えることが望ましい。
【0009】
このような制御システムによれば、制御結果の到達遅延が計測されることにより制御状態の推測精度が向上するので、未来時点の制御指令値の算出精度も向上する。
また、上記制御システムにおいて、上記指令遅延計測部は、上記制御指令値に付与されたタイムスタンプと受信時刻との比較で到達遅延を計測することが望ましい。タイムスタンプの利用によって正確かつ容易な遅延計測が可能となる。
【0010】
また、上記制御システムにおいて、上記結果遅延計測部も、上記制御結果に付与されたタイムスタンプと受信時刻との比較で到達遅延を計測することが望ましい。
また、上記制御システムにおいて、上記通信網の上記制御対象側に設けられ、当該制御対象に対する外乱と当該制御対象のパラメータ誤差とを補償する外乱オブザーバを更に備えることが望ましい。外乱オブザーバによって外乱などが抑制され、未来時点の制御指令値の算出精度が向上する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
ボールねじ装置
12日前
日本精工株式会社
ハブユニット軸受の外輪の製造方法
5日前
日本精工株式会社
転がり軸受用冠形保持器、及び転がり軸受
5日前
日本精工株式会社
転がり軸受の荷重推定装置、荷重推定方法、およびプログラム
5日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
5日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
5日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、及び車両の製造方法
12日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、および車両の製造方法
12日前
エイブリック株式会社
基準電圧回路
19日前
株式会社クボタ
作業車
22日前
株式会社ダイフク
搬送車
22日前
ローム株式会社
半導体集積回路
27日前
エイブリック株式会社
ボルテージレギュレータ
19日前
トヨタ自動車株式会社
工作機械の制御装置
21日前
トヨタ自動車株式会社
工作機械の制御装置
20日前
株式会社やまびこ
走行制御装置
7日前
株式会社ダイフク
物品搬送設備
20日前
株式会社タブチ
減圧弁
1日前
株式会社ダイヘン
搬送車
19日前
株式会社ダイヘン
搬送車
19日前
株式会社ダイヘン
搬送車
19日前
株式会社ダイヘン
搬送車
19日前
井関農機株式会社
作業車両
15日前
株式会社デンソー
診断装置
5日前
ミツミ電機株式会社
多方向入力装置
25日前
ミツミ電機株式会社
多方向入力装置
25日前
FCLコンポーネント株式会社
電源回路および検出装置
1日前
ローム株式会社
バイアス回路
21日前
ミツミ電機株式会社
多方向入力装置
25日前
ミツミ電機株式会社
多方向入力装置
25日前
ミツミ電機株式会社
多方向入力装置
25日前
オルガノ株式会社
運転管理方法及び運転管理装置
22日前
株式会社マキタ
作業ロボット
7日前
ダイハツ工業株式会社
無人搬送車の制御方法
20日前
ローム株式会社
レギュレータ回路
26日前
ローム株式会社
電源起動監視回路
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ