TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025067572
公報種別
公開特許公報(A)
公開日
2025-04-24
出願番号
2023177661
出願日
2023-10-13
発明の名称
転がり軸受の荷重推定装置、荷重推定方法、およびプログラム
出願人
日本精工株式会社
代理人
弁理士法人栄光事務所
主分類
G01M
13/045 20190101AFI20250417BHJP(測定;試験)
要約
【課題】より精度の高い転がり軸受の荷重推定方法を提供する。
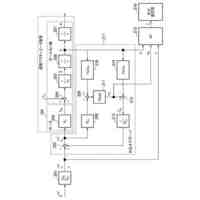
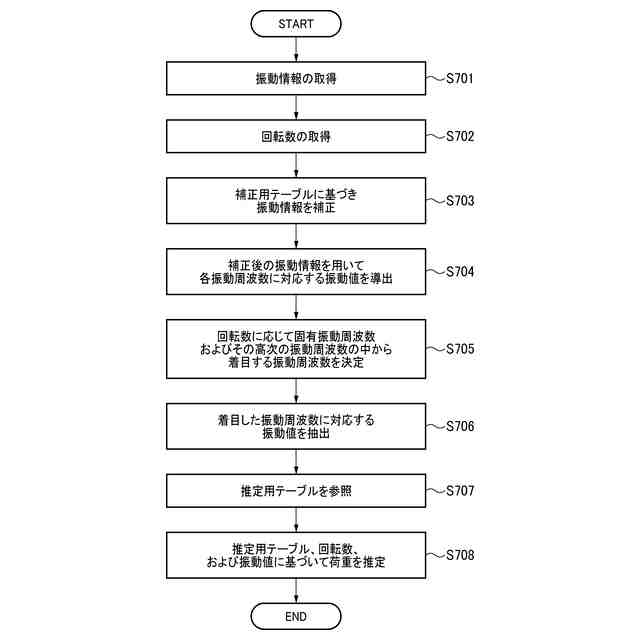
【解決手段】転がり軸受の荷重推定装置は、回転中の前記転がり軸受の振動情報を測定する振動センサと、回転中の前記転がり軸受の回転情報を測定する回転速度センサと、振動情報、回転情報、および補正値の対応関係が規定された、あるいは回転情報および補正値の対応関係が規定された第1のテーブルを用いて、補正値を導出し、当該導出した補正値により前記振動センサにて測定した振動情報を補正する補正手段と、前記補正手段にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出手段と、前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転情報の対応関係が規定された第2のテーブルを用いて、前記回転速度センサにて測定した回転速度と前記導出手段にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定手段と、を有する。
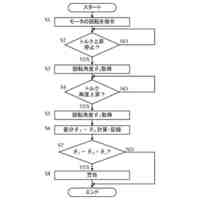
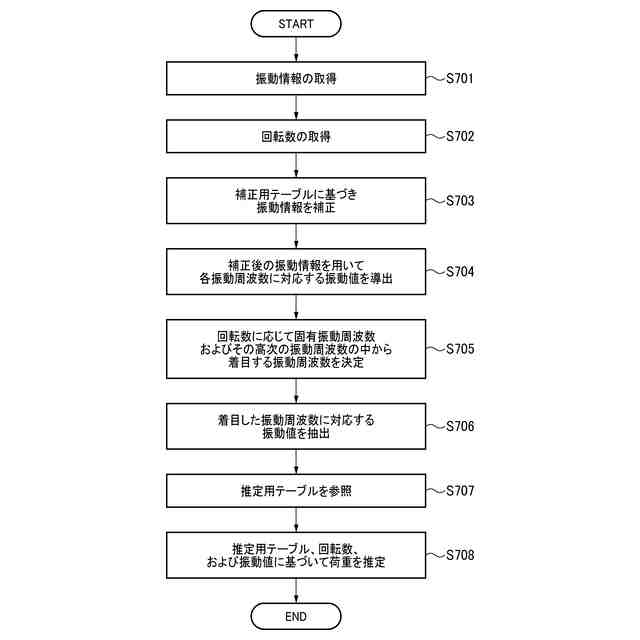
【選択図】図7
特許請求の範囲
【請求項1】
転がり軸受の荷重推定装置であって、
回転中の前記転がり軸受の振動情報を測定する振動センサと、
回転中の前記転がり軸受の回転情報を測定する回転速度センサと、
振動情報、回転情報、および補正値の対応関係が規定された、あるいは回転情報および補正値の対応関係が規定された第1のテーブルを用いて、補正値を導出し、当該導出した補正値により前記振動センサにて測定した振動情報を補正する補正手段と、
前記補正手段にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出手段と、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転情報の対応関係が規定された第2のテーブルを用いて、前記回転速度センサにて測定した回転速度と前記導出手段にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定手段と、
を有することを特徴とする荷重推定装置。
続きを表示(約 2,500 文字)
【請求項2】
前記導出手段は、前記補正手段にて補正された振動情報に対し、回転数変動による周波数の変動を抑制するためのリサンプリングによる次数比分析を用いて前記所定の振動周波数の振動値を導出する、請求項1に記載の荷重推定装置。
【請求項3】
転がり軸受の荷重推定装置であって、
回転中の前記転がり軸受の振動情報を測定する振動センサと、
回転中の前記転がり軸受の回転速度を測定する回転速度センサと、
少なくとも回転情報を入力とし、振動情報に対する補正値を出力として学習処理が行われることにより生成された学習済みモデルに対し、少なくとも前記回転速度センサにて測定した回転速度を入力することにより、補正値を導出し、当該導出した補正値により前記振動センサにて測定した振動情報を補正する補正手段と、
前記補正手段にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出手段と、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転速度の対応関係が規定されたテーブルを用いて、前記回転速度センサにて測定した回転速度と前記導出手段にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定手段と、
を有することを特徴とする荷重推定装置。
【請求項4】
前記導出手段は、前記補正手段にて補正された振動情報に対し、回転数変動による周波数の変動を抑制するためのリサンプリングによる次数比分析を用いて前記所定の振動周波数の振動値を導出する、請求項3に記載の荷重推定装置。
【請求項5】
前記転がり軸受は、風力発電装置の主軸を支持する転がり軸受であることを特徴とする請求項1から4のいずれか一項に記載の荷重推定装置。
【請求項6】
転がり軸受の荷重推定方法であって、
回転中の前記転がり軸受の振動情報を取得する第1の取得工程と、
回転中の前記転がり軸受の回転情報を取得する第2の取得工程と、
振動情報、回転情報、および補正値の対応関係が規定された、あるいは回転情報および補正値の対応関係が規定された第1のテーブルを用いて、補正値を導出し、当該導出した補正値により前記第1の取得工程にて取得した振動情報を補正する補正工程と、
前記補正工程にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出工程と、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転情報の対応関係が規定された第2のテーブルを用いて、前記第2の取得工程にて取得した回転速度と前記導出工程にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定工程と、
を有することを特徴とする荷重推定方法。
【請求項7】
転がり軸受の荷重推定方法であって、
回転中の前記転がり軸受の振動情報を取得する第1の取得工程と、
回転中の前記転がり軸受の回転速度を取得する第2の取得工程と、
少なくとも回転情報を入力とし、振動情報に対する補正値を出力として学習処理が行われることにより生成された学習済みモデルに対し、少なくとも前記第2の取得工程にて取得した回転速度を入力することにより、補正値を導出し、当該導出した補正値により前記第1の取得工程にて取得した振動情報を補正する補正工程と、
前記補正工程にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出工程と、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転速度の対応関係が規定されたテーブルを用いて、前記第2の取得工程にて取得した回転速度と前記導出工程にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定工程と、
を有することを特徴とする荷重推定方法。
【請求項8】
コンピュータに、
回転中の転がり軸受の振動情報を取得する第1の取得工程、
回転中の前記転がり軸受の回転情報を取得する第2の取得工程、
振動情報、回転情報、および補正値の対応関係が規定された、あるいは回転情報、および補正値の対応関係が規定された第1のテーブルを用いて、補正値を導出し、当該導出した補正値により前記第1の取得工程にて取得した振動情報を補正する補正工程、
前記補正工程にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出工程、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転情報の対応関係が規定された第2のテーブルを用いて、前記第2の取得工程にて取得した回転速度と前記導出工程にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定工程、
を実行させるためのプログラム。
【請求項9】
コンピュータに、
回転中の転がり軸受の振動情報を取得する第1の取得工程、
回転中の前記転がり軸受の回転速度を取得する第2の取得工程、
少なくとも回転情報を入力とし、振動情報に対する補正値を出力として学習処理が行われることにより生成された学習済みモデルに対し、少なくとも前記第2の取得工程にて取得した回転速度を入力することにより、補正値を導出し、当該導出した補正値により前記第1の取得工程にて取得した振動情報を補正する補正工程、
前記補正工程にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出工程、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転速度の対応関係が規定されたテーブルを用いて、前記第2の取得工程にて取得した回転速度と前記導出工程にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定工程、
を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、転がり軸受の荷重推定装置、荷重推定方法、およびプログラムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
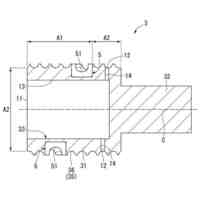
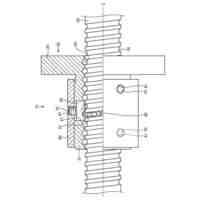
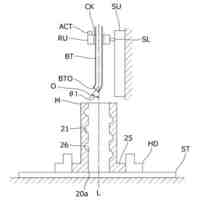
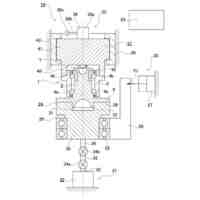
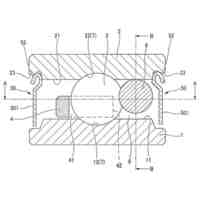
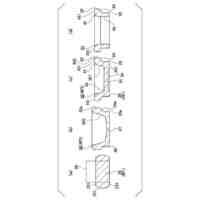
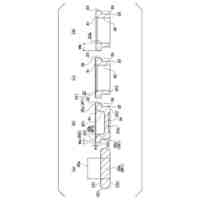
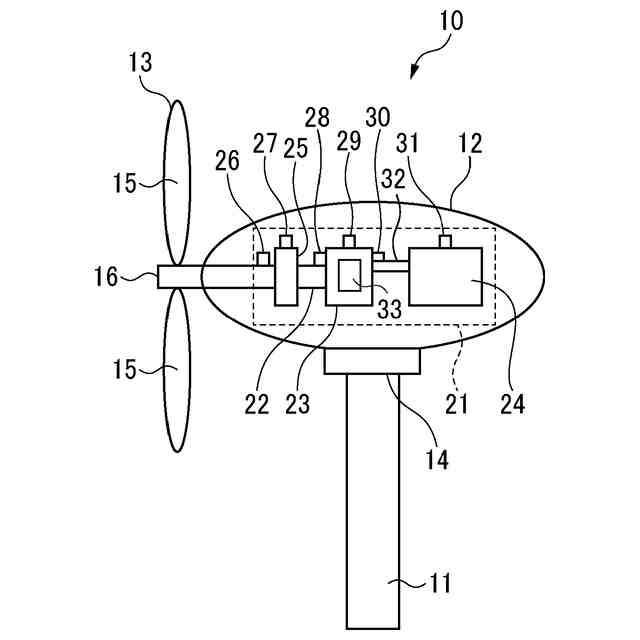
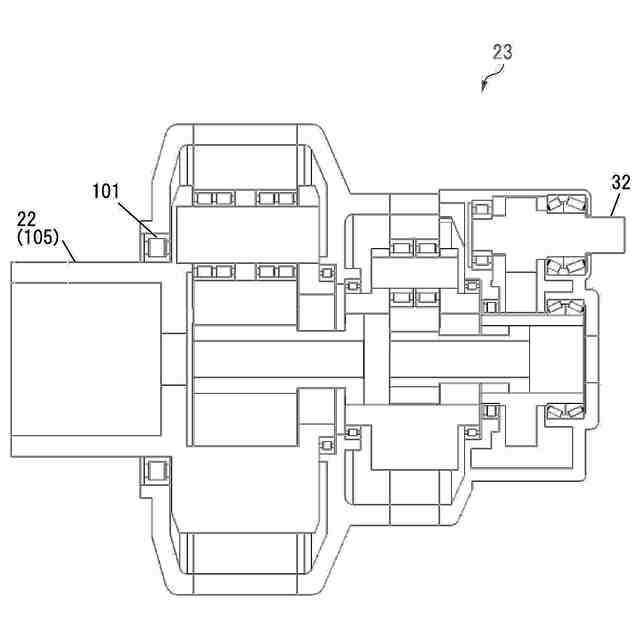
従来、風車などの機械装置では、その内部に設けられる転がり軸受などの回転部品に対する荷重に合わせた制御を行うことが求められる。例えば、転がり軸受において、荷重が小さくなりすぎると自転滑りや公転滑りが発生してスミアリングが発生したり、その一方で、荷重が大きくなりすぎると早期はくりや異常発熱が発生したりするなどの不具合が生じる恐れがある。このような不具合は、装置の誤作動や短寿命化の原因となりうる。そのため、転がり軸受に対して負荷されている荷重を測定するための方法が求められている。例えば、図8は機械装置に用いられる増速機の断面構成の例を示し、その内部には、主軸22を支持する転がり軸受101が備えられている。主軸22に負荷される荷重は、それを支持する転がり軸受101にも負荷される。
【0003】
例えば、特許文献1では、風力発電装置の主軸軸受において軌道輪のひずみ又は外輪と内輪の相対変位に基づいて、荷重を測定する方法が開示されている。また、特許文献2では、転がり軸受の回転動作時において発生する振動を測定し、測定した振動から得られる周波数に基づいて荷重を演算する方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2010-159710号公報
特開平11-002239号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
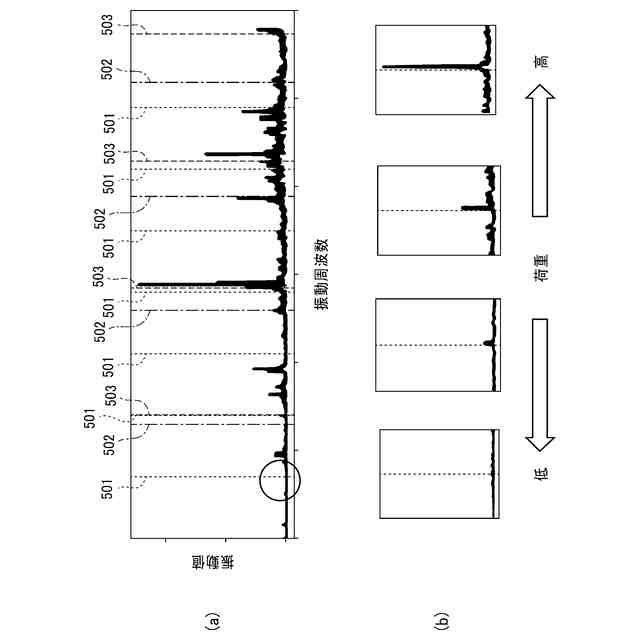
しかしながら、特許文献1の技術のようなひずみゲージ、または変位センサを用いる方法はそれらの取り付けは困難であり高コストとなる。特許文献2の技術では回転速度が変化する用途には十分ではない可能性がある。つまり、従来の手法では、風などの外的な要因により瞬間的に回転速度が変動し得る環境下においては、回転動作中の荷重を測定することは困難であった。より具体的には、回転数が変化した場合、同じ荷重でも振動値が変動してしまう。そのため、回転数の変化を考慮せずに、変動した振動値に対してFFT(Fast Fourier Transform)などによる診断処理を行うと誤差が生じ、荷重の推定精度も低下してしまう。
【0006】
上記課題を鑑み、本発明は、より精度の高い転がり軸受の荷重推定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本発明は以下の構成を有する。すなわち、転がり軸受の荷重推定装置であって、
回転中の前記転がり軸受の振動情報を測定する振動センサと、
回転中の前記転がり軸受の回転情報を測定する回転速度センサと、
振動情報、回転情報、および補正値の対応関係が規定された、あるいは回転情報および補正値の対応関係が規定された第1のテーブルを用いて、補正値を導出し、当該導出した補正値により前記振動センサにて測定した振動情報を補正する補正手段と、
前記補正手段にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出手段と、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転情報の対応関係が規定された第2のテーブルを用いて、前記回転速度センサにて測定した回転速度と前記導出手段にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定手段と、
を有する。
【0008】
また、本発明の別の形態は以下の構成を有する。すなわち、転がり軸受の荷重推定装置であって、
回転中の前記転がり軸受の振動情報を測定する振動センサと、
回転中の前記転がり軸受の回転速度を測定する回転速度センサと、
少なくとも回転情報を入力とし、振動情報に対する補正値を出力として学習処理が行われることにより生成された学習済みモデルに対し、少なくとも前記回転速度センサにて測定した回転速度を入力することにより、補正値を導出し、当該導出した補正値により前記振動センサにて測定した振動情報を補正する補正手段と、
前記補正手段にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出手段と、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転速度の対応関係が規定されたテーブルを用いて、前記回転速度センサにて測定した回転速度と前記導出手段にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定手段と、
を有する。
【0009】
また、本発明の別の形態は以下の構成を有する。すなわち、転がり軸受の荷重推定方法であって、
回転中の前記転がり軸受の振動情報を取得する第1の取得工程と、
回転中の前記転がり軸受の回転情報を取得する第2の取得工程と、
振動情報、回転情報、および補正値の対応関係が規定された、あるいは回転情報および補正値の対応関係が規定された第1のテーブルを用いて、補正値を導出し、当該導出した補正値により前記第1の取得工程にて取得した振動情報を補正する補正工程と、
前記補正工程にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出工程と、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転情報の対応関係が規定された第2のテーブルを用いて、前記第2の取得工程にて取得した回転速度と前記導出工程にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定工程と、
を有する。
【0010】
また、本発明の別の形態は以下の構成を有する。すなわち、転がり軸受の荷重推定方法であって、
回転中の前記転がり軸受の振動情報を取得する第1の取得工程と、
回転中の前記転がり軸受の回転速度を取得する第2の取得工程と、
少なくとも回転情報を入力とし、振動情報に対する補正値を出力として学習処理が行われることにより生成された学習済みモデルに対し、少なくとも前記第2の取得工程にて取得した回転速度を入力することにより、補正値を導出し、当該導出した補正値により前記第1の取得工程にて取得した振動情報を補正する補正工程と、
前記補正工程にて補正された振動情報を用いて所定の振動周波数の振動値を導出する導出工程と、
前記転がり軸受に対する荷重、前記所定の振動周波数の振動値、および回転速度の対応関係が規定されたテーブルを用いて、前記第2の取得工程にて取得した回転速度と前記導出工程にて導出した振動値に対応する、前記転がり軸受に対して負荷されている荷重を推定する推定工程と、
を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
ボールねじ
1か月前
日本精工株式会社
リニアガイド
1か月前
日本精工株式会社
信号出力回路
12日前
日本精工株式会社
ボールねじ装置
10日前
日本精工株式会社
こま式ボールねじ
1か月前
日本精工株式会社
ハブユニット軸受
10日前
日本精工株式会社
磁歪式トルクセンサ
24日前
日本精工株式会社
センサ付ハブユニット軸受
23日前
日本精工株式会社
ボールねじのナットの加工装置
1か月前
日本精工株式会社
ハブユニット軸受の予圧測定方法
20日前
日本精工株式会社
玉軸受用冠型保持器、及び玉軸受
23日前
日本精工株式会社
ハブユニット軸受の外輪の製造方法
3日前
日本精工株式会社
転がり軸受用冠形保持器、及び転がり軸受
3日前
日本精工株式会社
異常診断装置、異常診断方法およびプログラム
17日前
日本精工株式会社
アクチュエータ装置の制御装置、および制御方法
17日前
日本精工株式会社
ハブユニット軸受の予圧測定方法及び予圧測定装置
1か月前
日本精工株式会社
玉軸受、及び、玉軸受におけるグリースの塗布方法
23日前
日本精工株式会社
転がり軸受の荷重推定装置、荷重推定方法、およびプログラム
3日前
日本精工株式会社
機械部品の製造方法、軸受の製造方法、機械部品、軸受、機械、及び車両
11日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
3日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
3日前
日本精工株式会社
歯車装置、直動アクチュエータ、バックラッシ角度測定方法およびプログラム
18日前
日本精工株式会社
パラレルリンクを含むロボット、および、パラレルリンクを含むロボットの製造方法
25日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、及び車両の製造方法
10日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、および車両の製造方法
10日前
個人
粒子分析装置
3日前
個人
アクセサリー型テスター
4日前
日本精機株式会社
位置検出装置
20日前
株式会社テイエルブイ
振動検出装置
3日前
エイブリック株式会社
電流検出回路
17日前
株式会社ミツトヨ
画像測定機
5日前
栄進化学株式会社
浸透探傷用濃縮液
10日前
東レ株式会社
シート状物の検査方法
18日前
東ソー株式会社
自動分析装置及び方法
20日前
ダイハツ工業株式会社
試料セル
3日前
株式会社チノー
放射光測温装置
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ