TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059917
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170317
出願日
2023-09-29
発明の名称
アクチュエータ装置の制御装置、および制御方法
出願人
日本精工株式会社
代理人
弁理士法人栄光事務所
主分類
G05B
13/02 20060101AFI20250403BHJP(制御;調整)
要約
【課題】力の釣り合いを考慮した静止摩擦力に基づいて、より精度の高いアクチュエータ装置の制御を実現する。
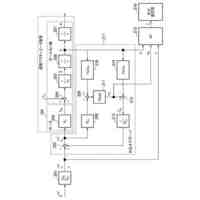
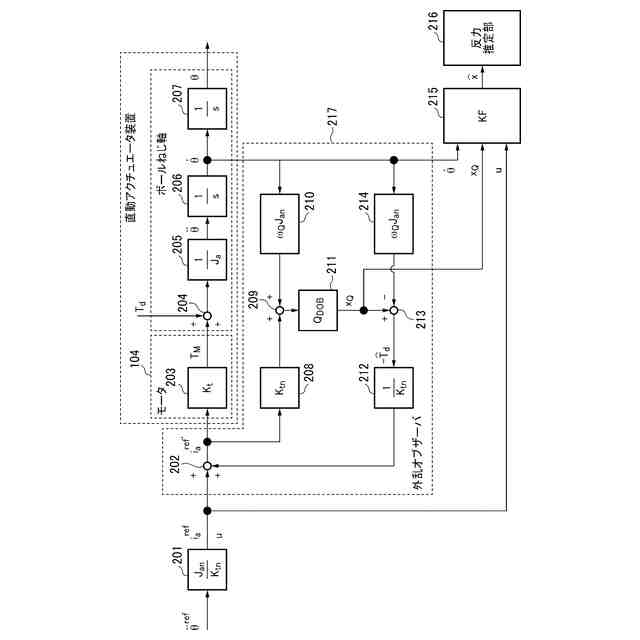
【解決手段】モータを用いて動作するアクチュエータ装置の制御装置であって、外乱オブザーバと、前記外乱オブザーバの中間パラメータと、カルマンフィルタとを用いて前記アクチュエータ装置に対する外乱トルクを推定する外乱トルク推定手段と、前記外乱トルク推定手段にて推定された外乱トルクと、モータトルクと静摩擦と反力がつり合う状態のモデルに基づいて、前記アクチュエータ装置に作用する反力を推定する反力推定手段と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
モータを用いて動作するアクチュエータ装置の制御装置であって、
外乱オブザーバと、
前記外乱オブザーバの中間パラメータと、カルマンフィルタとを用いて前記アクチュエータ装置に対する外乱トルクを推定する外乱トルク推定手段と、
前記外乱トルク推定手段にて推定された外乱トルクと、モータトルクと静摩擦と反力がつり合う状態のモデルに基づいて、前記アクチュエータ装置に作用する反力を推定する反力推定手段と、
を備えることを特徴とする制御装置。
続きを表示(約 710 文字)
【請求項2】
前記モデルは、慣性力に対応するパラメータを含む、請求項1に記載の制御装置。
【請求項3】
前記反力推定手段は、前記モデルに対応する以下の式に基づいて、前記反力の推定値を導出する、請求項2に記載の制御装置。
TIFF
2025059917000028.tif
77
152
【請求項4】
前記カルマンフィルタは、線形カルマンフィルタである、請求項1に記載の制御装置。
【請求項5】
前記カルマンフィルタは、非線形カルマンフィルタである、請求項1に記載の制御装置。
【請求項6】
前記外乱オブザーバの中間パラメータは、前記モータに対する電流指令値から導出されるトルク値と、モータ角速度から導出されるトルク値との合成値に対して、ローパスフィルタを適用することにより得られる値である、請求項1に記載の制御装置。
【請求項7】
前記外乱トルク推定手段は更に、前記モータにおけるトルクリップルに基づいて外乱トルクを推定する、請求項1に記載の制御装置。
【請求項8】
モータを用いて動作するアクチュエータ装置の制御方法であって、
外乱オブザーバの中間パラメータと、カルマンフィルタとを用いて前記アクチュエータ装置に対する外乱トルクを推定する外乱トルク推定工程と、
前記外乱トルク推定工程にて推定された外乱トルクと、モータトルクと静摩擦と反力がつり合う状態のモデルに基づいて、前記アクチュエータ装置に作用する反力を推定する反力推定工程と、
を有する制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクチュエータ装置の制御装置、および制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
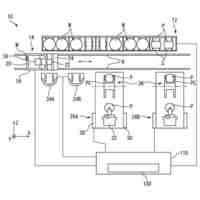
従来、様々な機械装置において、モータにより駆動されるアクチュエータ装置が用いられている。アクチュエータ装置では、その動作に際し、反力推定や力制御が行われている。アクチュエータ装置を適用可能な機械装置の一例として、具体的には、プラスチック製品の搬送機器、力触覚デバイス、介護ロボットなどが挙げられる。
【0003】
例えば、特許文献1では、オブザーバによりアクチュエータに係る荷重を反力として推定し、そこに含まれる摩擦力の影響は予め同定したアクチュエータの最大静止摩擦力を用いて取り除く構成が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-187099号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の手法では、最大静止摩擦力に基づいて制御を行っている。このような構成において、実際の摩擦力と、同定した最大静止摩擦力とが一致するタイミングは、アクチュエータが停止している状態から動き始める状態に遷移した瞬間のみとなる。つまり、停止中の状態や、動いている状態から停止状態となる瞬間の摩擦力を考慮することができない。そのため、例えば、特許文献1のような最大静止摩擦のみからでは、正確に反力を推定することが困難である。
【0006】
具体的な機械装置を想定して説明する。例えば、プラスチック製品の搬送機器では、プラスチックを把持する場合や把持状態を維持して搬送する場合に、プラスチック容器の把持に必要な力に対して、把持用のアクチュエータ装置が出力可能な力が大きいことが挙がられる。このような場合、把持対象となるプラスチック容器にアクチュエータ装置から過剰な力が加わると、プラスチック容器の変形や破損が生じてしまう。一方、把持力が小さい場合には、搬送中にプラスチック容器の落下が生じてしまう。
【0007】
また、力触覚デバイスは、人の指に装着し、力や触覚を人へ伝える装置として利用され、例えば、遠隔操縦ロボットのコントローラ部に組み込んで用いられる。このような構成において、アクチュエータ装置を用いて、力触覚デバイスの使用者に対し、遠隔操縦ロボットが対象物に対して負荷している力を提示することが行われる。このとき、遠隔操縦ロボットが対象物に負荷している力を正確に使用者に提示できない場合、操作者が操作量を適切に調整できず、結果として遠隔操縦ロボットにより対象物を破壊してしまう可能性がある。
【0008】
また、介護ロボットは、例えば、高齢者や負傷者の介護やアシストのために用いられる。高齢者をベッドから車いすへ移乗させる介護作業などでは、高齢者に痛みや不安を与えないように、介護ロボットを用いて抱きかかえる必要がある。このとき、介護対象者に与えている力を正確に調整できない場合、介護対象者に対して痛みや不安を感じさせるのみならず、負傷させるような大きな力を負荷してしまう可能性がある。
【0009】
上記のように、アクチュエータ装置を適用する様々な装置においては、その装置の用途や利用状況などを考慮して、アクチュエータ装置が発揮する力、すなわち、対象物にアクチュエータ装置から負荷する力を適切に制御することが求められている。そのためには、アクチュエータ装置が動作する際に、アクチュエータ装置に対して働く反力を精度良く推定する必要がある。
【0010】
上記課題を鑑み、本発明は、力の釣り合いを考慮した静止摩擦力に基づいて、より精度の高いアクチュエータ装置の制御を実現することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
磁歪式トルクセンサ
10日前
日本精工株式会社
センサ付ハブユニット軸受
9日前
日本精工株式会社
ハブユニット軸受の予圧測定方法
6日前
日本精工株式会社
玉軸受用冠型保持器、及び玉軸受
9日前
日本精工株式会社
異常診断装置、異常診断方法およびプログラム
3日前
日本精工株式会社
アクチュエータ装置の制御装置、および制御方法
3日前
日本精工株式会社
玉軸受、及び、玉軸受におけるグリースの塗布方法
9日前
日本精工株式会社
歯車装置、直動アクチュエータ、バックラッシ角度測定方法およびプログラム
4日前
エイブリック株式会社
基準電圧回路
3日前
和研工業株式会社
多連レバー機構
16日前
株式会社クボタ
作業車
6日前
株式会社ダイフク
搬送車
6日前
ローム株式会社
半導体集積回路
11日前
エイブリック株式会社
ボルテージレギュレータ
3日前
トヨタ自動車株式会社
工作機械の制御装置
5日前
トヨタ自動車株式会社
工作機械の制御装置
4日前
株式会社ダイフク
物品搬送設備
4日前
アズビル株式会社
制御システムおよび制御方法
17日前
アズビル株式会社
制御システムおよび制御方法
17日前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
ミツミ電機株式会社
多方向入力装置
9日前
ローム株式会社
バイアス回路
5日前
オルガノ株式会社
運転管理方法及び運転管理装置
6日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
9日前
ダイハツ工業株式会社
無人搬送車の制御方法
4日前
岩井ファルマテック株式会社
監査証跡の管理システム
12日前
ローム株式会社
レギュレータ回路
10日前
株式会社TMEIC
リモートI/Oステーション
17日前
ローム株式会社
電源起動監視回路
4日前
株式会社牧野フライス製作所
生産システム
18日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ