TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025057951
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023167806
出願日
2023-09-28
発明の名称
無人搬送車の制御方法
出願人
ダイハツ工業株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250402BHJP(制御;調整)
要約
【課題】無人搬送車を一旦誘導ラインから離脱させた後、誘導ライン上に正確に復帰させる。
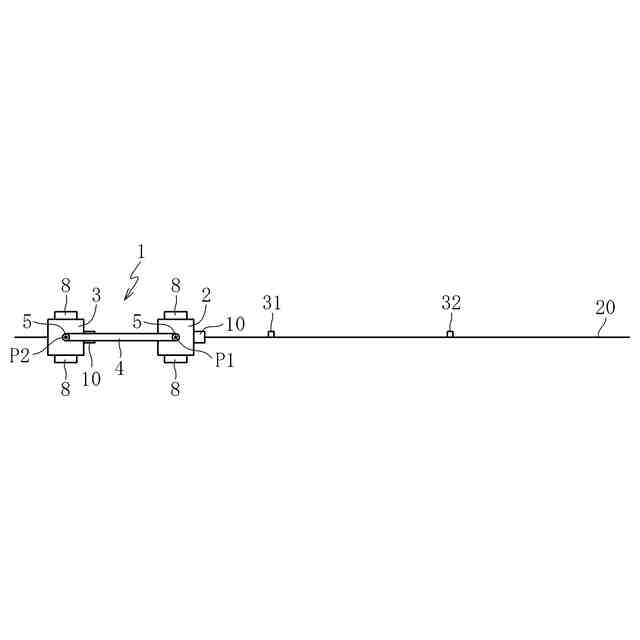
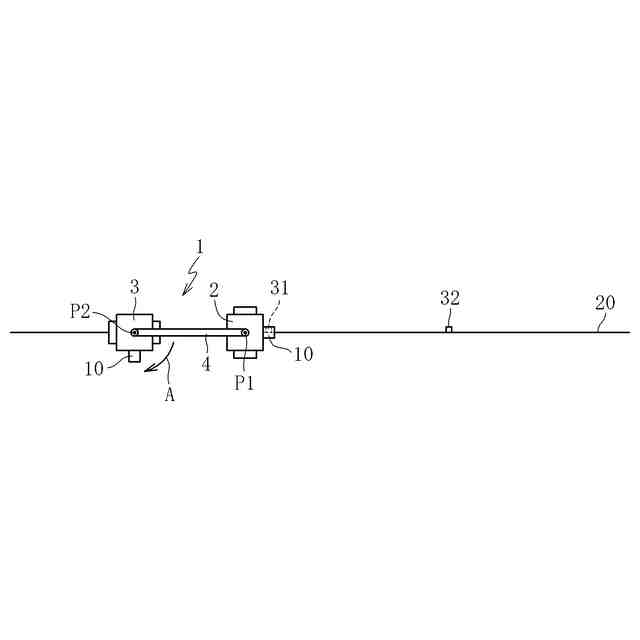
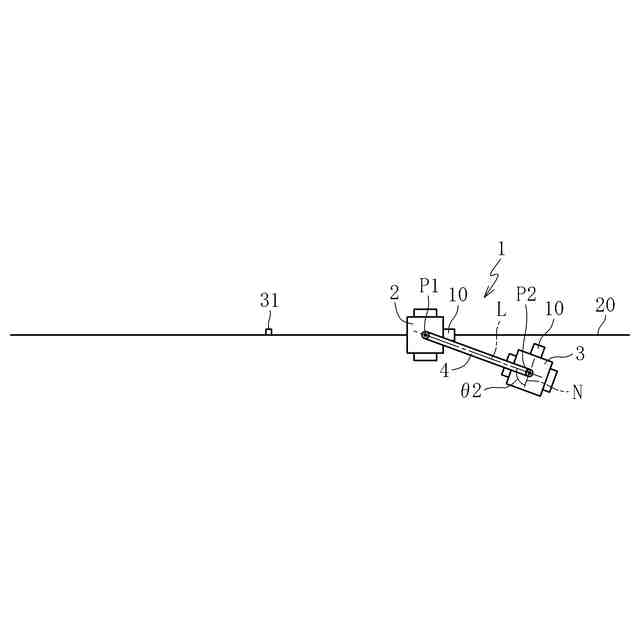
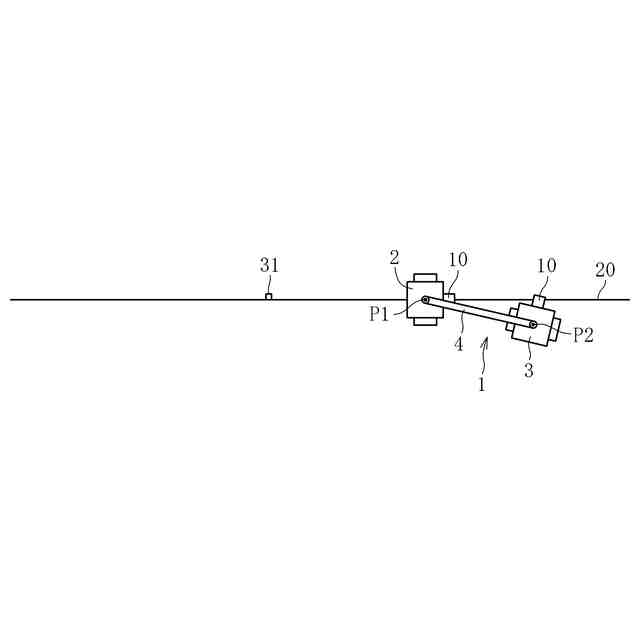
【解決手段】第2無人搬送車3を自律走行させながら、カメラ10による誘導ライン20の検出を行う。この検出結果に基づいて、第2無人搬送車3が誘導ライン20の位置(仮想誘導ライン20’)を取得する。この誘導ライン20の位置(仮想誘導ライン20’)と第2無人搬送車3の自己位置P2とのズレ量が所定範囲内となるように、第2無人搬送車3を自律走行させる。
【選択図】図14
特許請求の範囲
【請求項1】
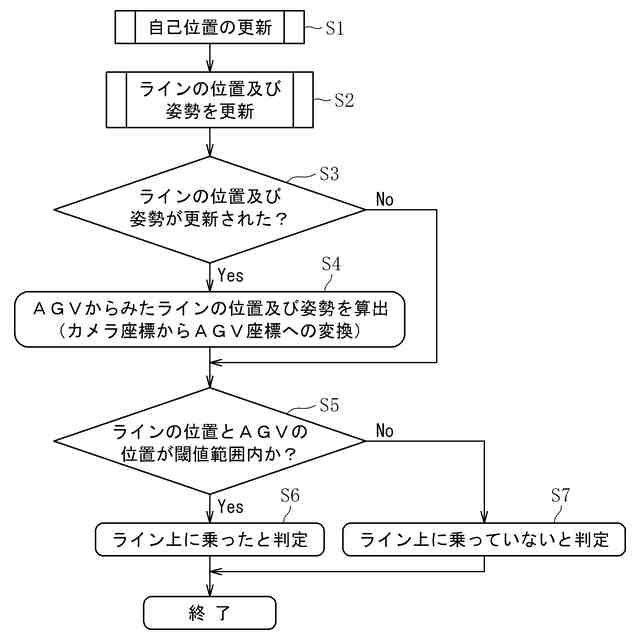
走行路に設けられた誘導ラインを検出するライン検出部を有する無人搬送車を、前記誘導ラインから離脱させて自律走行させた後、前記誘導ライン上に復帰させる際に、
前記無人搬送車を自律走行させながら、前記ライン検出部による前記誘導ラインの検出を行う工程と、
前記ライン検出部の検出結果に基づいて、前記無人搬送車が前記誘導ラインの位置を取得する工程と、
前記無人搬送車が取得した前記誘導ラインの位置と前記無人搬送車の自己位置とのズレ量が所定範囲内となるように前記無人搬送車を自律走行させる工程とを有する無人搬送車の制御方法。
続きを表示(約 580 文字)
【請求項2】
前記ライン検出部が前記誘導ラインを検出した後、前記誘導ラインが前記ライン検出部の検出可能範囲から外れた状態で、前記無人搬送車が取得した前記誘導ラインの位置と前記無人搬送車の自己位置とのズレ量が所定範囲内となるように前記無人搬送車を自律走行させる請求項1に記載の無人搬送車の制御方法。
【請求項3】
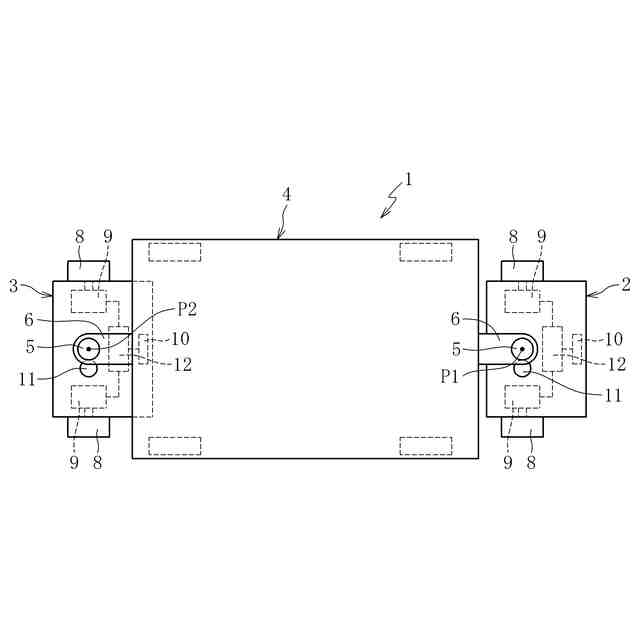
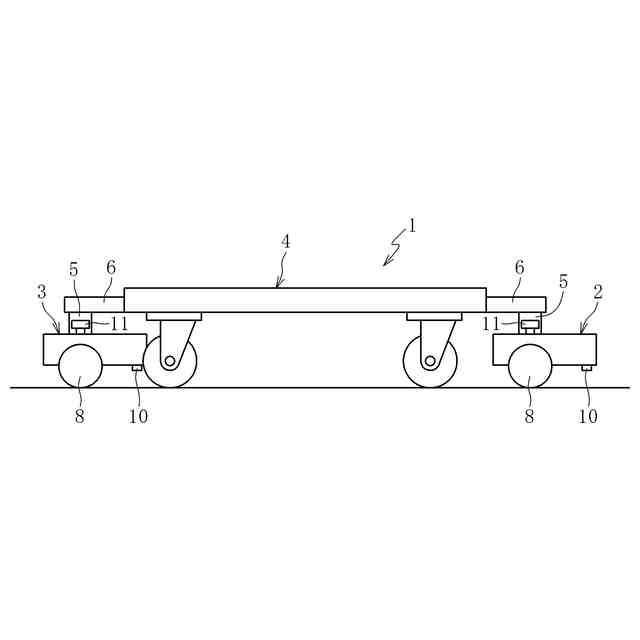
走行路に設けられた誘導ラインを検出するライン検出部を有する第1無人搬送車及び第2無人搬送車と、前記第1無人搬送車と前記第2無人搬送車とを連結する連結部とを有する無人搬送装置を制御するにあたり、
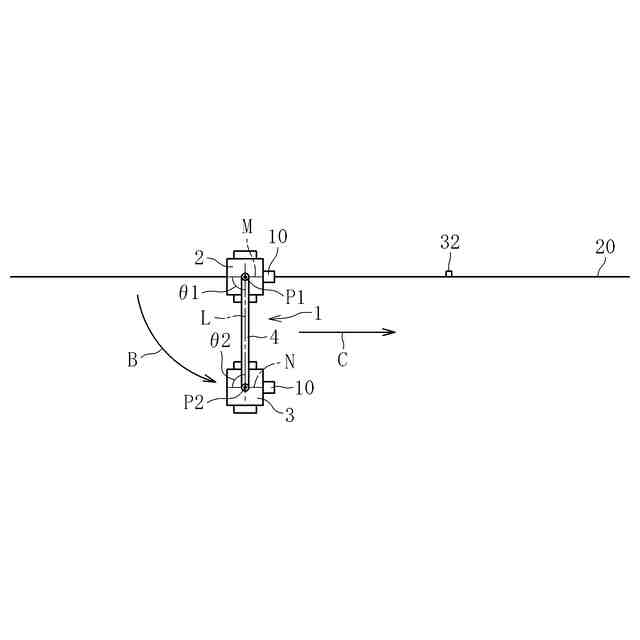
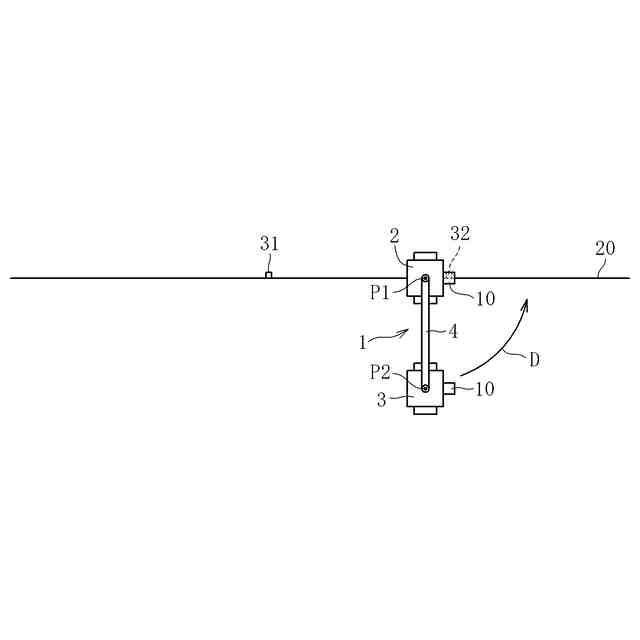
前記第1無人搬送車を前記誘導ライン上に配した状態で、前記第2無人搬送車を、前記誘導ラインから離脱させて前記第1無人搬送車を中心に旋回するように自律走行させ、前記誘導ライン上に復帰させる際に、
前記第2無人搬送車を自律走行させながら、前記第2無人搬送車の前記ライン検出部による前記誘導ラインの検出を行う工程と、
前記ライン検出部の検出結果に基づいて、前記第2無人搬送車が前記誘導ラインの位置を取得する工程と、
前記第2無人搬送車が取得した前記誘導ラインの位置と前記第2無人搬送車の自己位置とのズレ量が所定範囲内となるように、前記第2無人搬送車を自律走行させる工程とを有する無人搬送装置の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、無人搬送車の制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
車体の組立工程では、搬送装置で車体を搬送しながら、車体の幅方向両側から各種部品を組み付けることが多い。例えば下記の特許文献1には、誘導ライン(軌道線)に沿って走行可能な無人搬送車で車体を搬送しながら、車体に各種部品を順次組み付ける方法が示されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-207225号公報
特開平7-5912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のように無人搬送車を用いた組立ラインでは、車体の搬送経路の両側に作業者や部品が配置される。これに対し、例えば図17に示すように、車体Wが搭載された台車103を2台の無人搬送車101、102で搬送すれば、車体Wの向きを自由に変更することができる。例えば、図17の第1作業エリアQ1では、第1無人搬送車101を先行側、第2無人搬送車102を後行側とし、車体Wの前方を前向きにした状態で搬送しながら、車体Wの左側から部品が組み付けられる。一方、第2作業エリアQ2では、第2無人搬送車102を先行側、第1無人搬送車101を後行側とし、車体Wの後方を前向きにした状態で搬送しながら、車体Wの右側から部品が組み付けられる。この場合、車体Wの搬送経路の幅方向一方側(図中上側)のみに作業者や部品を配置すればよいため、組立ラインの幅方向寸法を縮小できる。
【0005】
上記のように、車体Wの向きを変える場合、第1無人搬送車101及び第2無人搬送車102の順序を入れ替える必要がある。例えば、図18に示すように、第2無人搬送車102を誘導ライン110から離脱させ、第1無人搬送車101を中心として180°旋回走行させることで、両無人搬送車101、102の順序を入れ替えて車体Wの向きを反転させることができる。しかし、第2無人搬送車102が誘導ライン110から離脱して旋回走行している間に、旋回角の基準となる第1無人搬送車101の向きが僅かにずれることがある。また、誘導ライン110は、通常、作業者が手作業で敷設するため、完全な直線ではないことがある。これらの場合、第2無人搬送車102を第1無人搬送車101に対して180°旋回走行させても、第2無人搬送車102が誘導ライン110上に正確に配されないことがある。
【0006】
例えば、上記の特許文献2には、無人搬送車の走行経路が、第1の誘導走行区間と第2の誘導走行区間とに挟まれた自律走行区間を有する場合に、第1誘導走行区間から自律走行区間に移行する時点における無人搬送車の姿勢に基づいて、第2の誘導走行区間に正確に正常な姿勢で到達するまでの走行距離、走行時間、及び操舵速度を算出することで、無人搬送車を第2の誘導走行区間に復帰させる方法が示されている。しかし、この場合、自立走行区間の距離が長くなるほど誤差が積算されるため、第2の誘導走行区間に正確に復帰させることが難しくなる。
【0007】
そこで、本発明は、無人搬送車を一旦誘導ラインから離脱させた後、誘導ライン上に正確に復帰させることを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、本発明は、走行路に設けられた誘導ラインを検出するライン検出部を有する無人搬送車を、前記誘導ラインから離脱させて自律走行させた後、前記誘導ライン上に復帰させる際に、
前記無人搬送車を自律走行させながら、前記ライン検出部による前記誘導ラインの検出を行う工程と、
前記ライン検出部の検出結果に基づいて、前記無人搬送車が前記誘導ラインの位置を取得する工程と、
前記無人搬送車が記憶した前記誘導ラインの位置と前記無人搬送車の自己位置とのズレ量が所定範囲内となるように前記無人搬送車を自律走行させる工程とを有する無人搬送車の制御方法を提供する。
【0009】
無人搬送車を誘導ラインから離脱して自律走行させる際には、通常、ライン検出部による誘導ラインの検出は行われない。本発明では、上記のように、無人搬送車を誘導ラインから離脱させて自律走行させながら、ライン検出部による誘導ラインの検出を行い、この検出結果に基づいて無人搬送車が誘導ラインの位置を取得する。こうして無人搬送装置が取得した誘導ラインの位置と無人搬送車の自己位置とのズレ量が所定範囲内となるように無人搬送車を自律走行させることで、無人搬送車を誘導ライン上に正確に復帰させることができる。
【0010】
上記のように、ライン検出部で誘導ラインを検出したときに誘導ラインの位置を取得することで、その後に誘導ラインがライン検出部の検出可能範囲から外れた場合でも、無人搬送装置が既に取得した誘導ラインの位置と無人搬送車の自己位置とのズレ量が所定範囲内となるように無人搬送車を自律走行させることにより、無人搬送車を誘導ライン上に正確に配することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
トヨタ自動車株式会社
ペダル機構
3日前
株式会社ダイフク
搬送設備
4日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
13日前
トヨタ自動車株式会社
移動体、及び制御方法
11日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社やまびこ
走行制御装置
1か月前
株式会社タブチ
減圧弁
28日前
株式会社計数技研
移動体、及びプログラム
4日前
WHILL株式会社
電動モビリティ
12日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
11日前
日本信号株式会社
自走式装置
18日前
株式会社ダイヘン
搬送車
1か月前
株式会社デンソー
診断装置
1か月前
井関農機株式会社
作業車両
1か月前
株式会社アイシン
自律移動体
18日前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
株式会社アイシン
自律移動体
18日前
ローム株式会社
バイアス回路
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
28日前
株式会社アイシン
自律移動体
18日前
株式会社アイシン
自律移動体
18日前
株式会社マキタ
作業ロボット
1か月前
ダイハツ工業株式会社
無人搬送車の制御方法
1か月前
横河電機株式会社
電流出力装置
5日前
三菱電機株式会社
状態推定装置及び移動体制御装置
14日前
ファナック株式会社
機械プログラミング方法
24日前
株式会社ダイヘン
情報処理装置
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ