TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025072803
公報種別
公開特許公報(A)
公開日
2025-05-12
出願番号
2023183145
出願日
2023-10-25
発明の名称
状態推定装置及び移動体制御装置
出願人
三菱電機株式会社
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20250501BHJP(制御;調整)
要約
【課題】移動体の移動状態の推定についての信頼度を適切に算出可能な技術を提供することを目的とする。
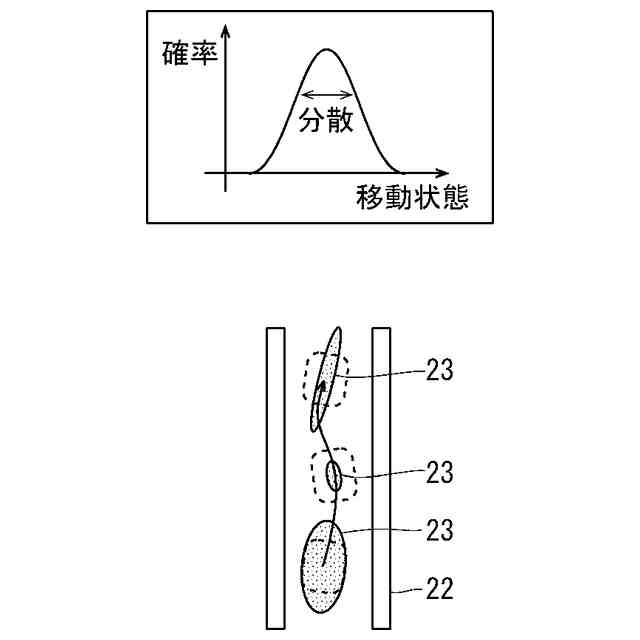
【解決手段】状態推定装置は、状態推定部と、信頼度算出部とを備える。状態推定部は、移動体のセンサ情報に基づいて移動体の移動状態を推定する。状態推定部は、移動状態の分散に基づいて、分散の発生確率の分布である分散確率分布を推定する。信頼度算出部は、分散確率分布に基づいて、移動状態の推定についての信頼度を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体のセンサ情報に基づいて前記移動体の移動状態を推定し、前記移動状態の分散に基づいて、前記分散の発生確率の分布である分散確率分布を推定する状態推定部と、
前記分散確率分布に基づいて、前記移動状態の推定についての信頼度を算出する信頼度算出部と
を備える、状態推定装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の状態推定装置であって、
前記分散確率分布は、分布関数によってモデル化されている、状態推定装置。
【請求項3】
請求項1または請求項2に記載の状態推定装置であって、
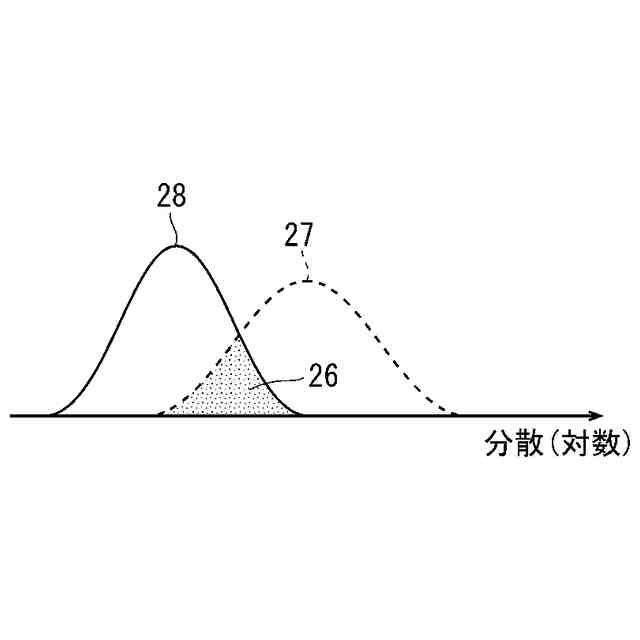
前記移動体の事前走行時の前記センサ情報に基づいて前記状態推定部で推定された前記分散確率分布を記憶する記憶部をさらに備え、
前記信頼度算出部は、
現在の時刻から予め定められた過去の期間の前記センサ情報に基づいて前記状態推定部で推定された前記分散確率分布と、前記記憶部に記憶された前記分散確率分布との重複率を、前記信頼度として算出する、状態推定装置。
【請求項4】
請求項1または請求項2に記載の状態推定装置であって、
前記状態推定部は、
前記移動体の並進方向及び回転方向のそれぞれの前記分散確率分布を推定し、
前記信頼度算出部は、
前記並進方向及び前記回転方向の前記分散確率分布に基づいて、前記並進方向及び前記回転方向の前記信頼度をそれぞれ算出する、状態推定装置。
【請求項5】
請求項1または請求項2に記載の状態推定装置であって、
前記状態推定部は、
複数の予め定められた場所について前記分散確率分布を推定し、
前記信頼度算出部は、
前記移動体が一つの前記予め定められた場所に位置する場合に、前記一つの予め定められた場所について推定された前記分散確率分布に基づいて前記信頼度を算出する、状態推定装置。
【請求項6】
請求項1または請求項2に記載の状態推定装置であって、
前記信頼度に基づいて、前記移動状態の正否を判定する判定部をさらに備える、状態推定装置。
【請求項7】
請求項1または請求項2に記載の状態推定装置と、
前記信頼度に基づいて、前記信頼度を回復する信頼度回復部と
を備える、移動体制御装置。
【請求項8】
請求項7に記載の移動体制御装置であって、
前記信頼度回復部は、
前記信頼度に基づいて前記移動体の速度を制御することによって前記信頼度を回復する、移動体制御装置。
【請求項9】
請求項7に記載の移動体制御装置であって、
前記状態推定部は、パーティクルフィルタを用いて前記センサ情報に基づく前記移動状態を推定し、
前記信頼度回復部は、
前記信頼度に基づいて、前記パーティクルフィルタと前記分散とに基づくフィッティング処理を前記状態推定部に行わせることによって、前記信頼度を回復する、移動体制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、状態推定装置及び移動体制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
移動体の移動状態を推定する装置について様々な技術が提案されている。例えば特許文献1には、中心点群と参照点群との一致度を表す第1スコアと、中心点群の周囲に設定された仮想点群と参照点群との一致度を表す第2スコアとの比率から、移動体の位置の推定について信頼度を算出する技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-123568号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術では、第1スコア及び第2スコアのそれぞれについて点群の一致度を算出する必要があるため、計算コストが比較的大きいという問題があった。
【0005】
そこで、本開示は、上記のような問題点に鑑みてなされたものであり、移動体の移動状態の推定についての信頼度を適切に算出可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る状態推定装置は、移動体のセンサ情報に基づいて前記移動体の移動状態を推定し、前記移動状態の分散に基づいて、前記分散の発生確率の分布である分散確率分布を推定する状態推定部と、前記分散確率分布に基づいて、前記移動状態の推定についての信頼度を算出する信頼度算出部とを備える。
【発明の効果】
【0007】
本開示によれば、移動状態の分散に基づいて分散確率分布を推定し、分散確率分布に基づいて移動状態の推定についての信頼度を算出する。このような構成によれば、移動体の移動状態の推定についての信頼度を適切に算出することができる。
【図面の簡単な説明】
【0008】
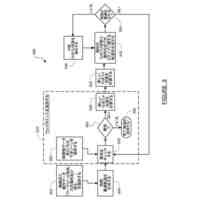
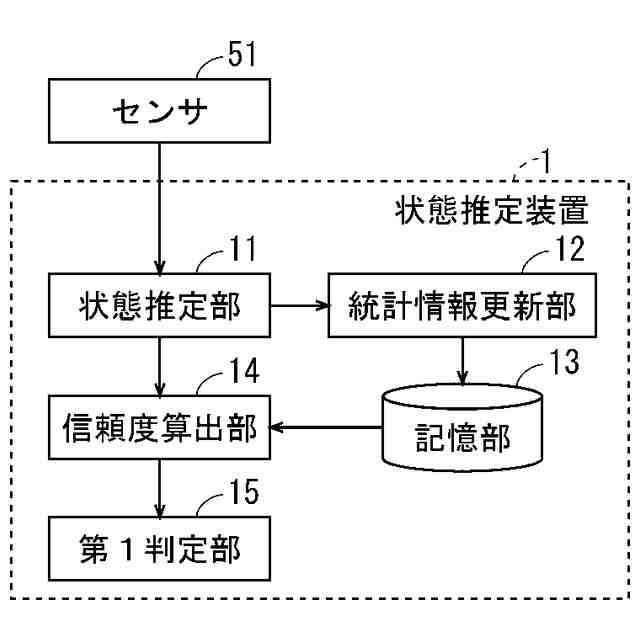
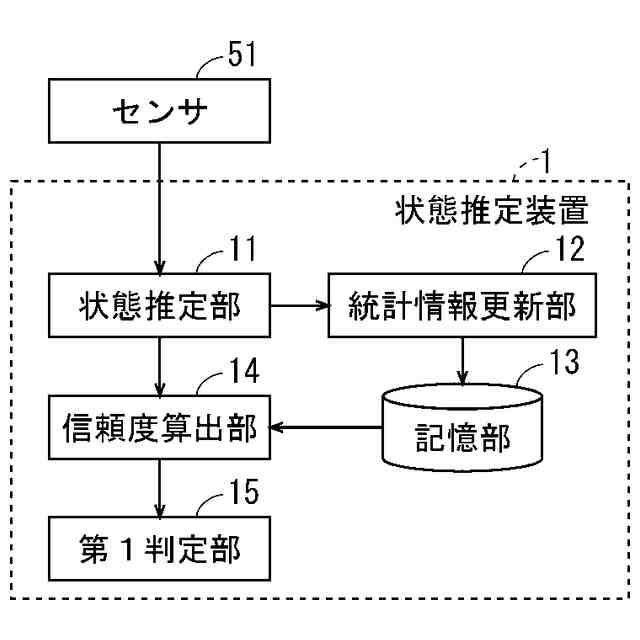
実施の形態1に係る状態推定装置の構成を示すブロック図である。
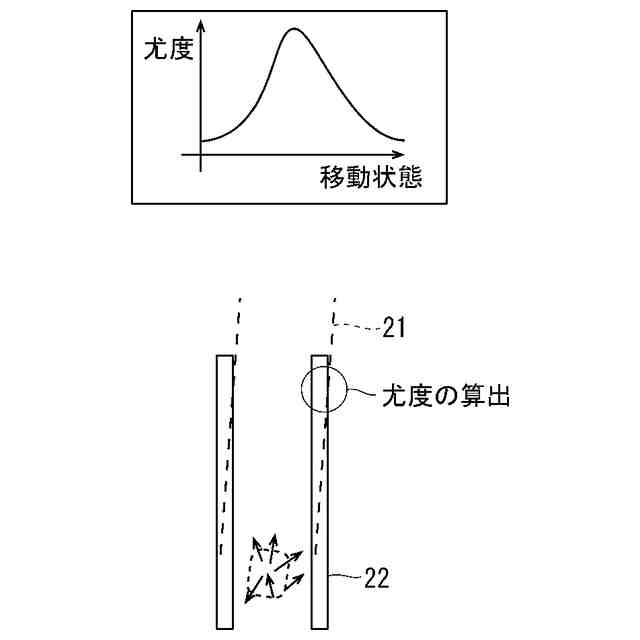
実施の形態1に係る状態推定部の動作を説明するための図である。
実施の形態1に係る状態推定部の動作を説明するための図である。
実施の形態1に係る分散確率分布の一例を示す図である。
実施の形態1の変形例2に係る信頼度算出部の動作を説明するための図である。
実施の形態1の変形例3に係る信頼度算出部の動作を説明するための図である。
実施の形態1の変形例4に係る信頼度算出部の動作を説明するための図である。
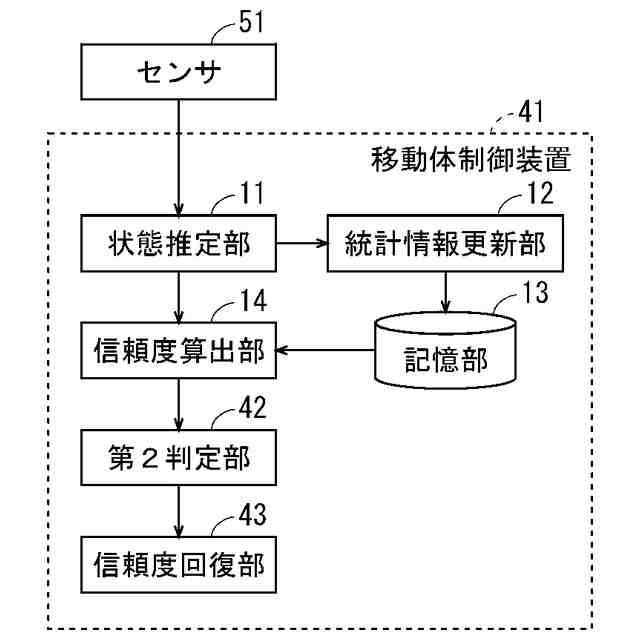
実施の形態2に係る移動体制御装置の構成を示すブロック図である。
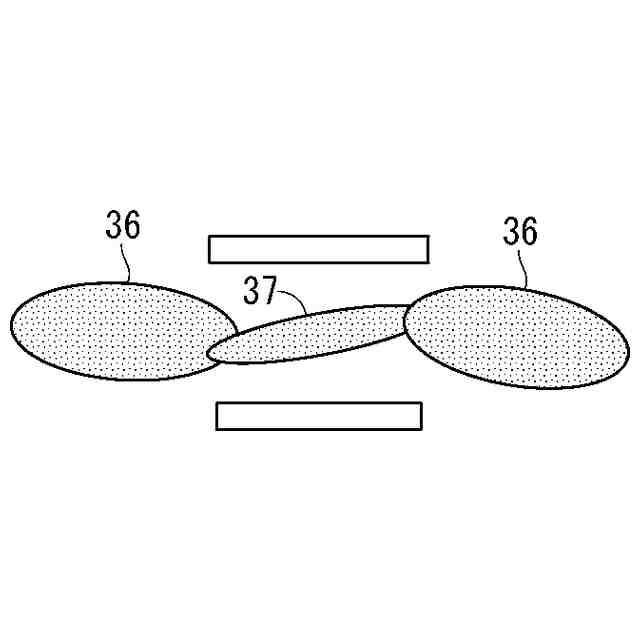
実施の形態2に係る信頼度回復部の動作を説明するための図である。
(a)~(c)は実施の形態2の変形例1に係る信頼度回復部の動作を説明するための図である。
その他の変形例に係る状態推定装置のハードウェア構成を示すブロック図である。
その他の変形例に係る状態推定装置のハードウェア構成を示すブロック図である。
【発明を実施するための形態】
【0009】
<実施の形態1>
図1は、本実施の形態1に係る状態推定装置1の構成を示すブロック図である。図1の状態推定装置1は、状態推定部11と、統計情報更新部12と、記憶部13と、信頼度算出部14と、判定部である第1判定部15とを備えており、センサ51と接続されている。
【0010】
センサ51は、移動体周囲の障害物を示す点群を検出し、当該点群の情報を移動体のセンサ情報として生成する。移動体は、例えば、車両、または、ロボットなどの移動可能な物体である。センサ51は、例えばミリ波レーダ、及び、LiDAR(Light Detection And Ranging)などである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
三菱電機株式会社
自己位置推定装置
2日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
23日前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
今日
株式会社タブチ
減圧弁
17日前
WHILL株式会社
電動モビリティ
1日前
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
7日前
株式会社デンソー
診断装置
21日前
井関農機株式会社
作業車両
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
7日前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
7日前
ローム株式会社
バイアス回路
1か月前
株式会社アイシン
自律移動体
7日前
FCLコンポーネント株式会社
電源回路および検出装置
17日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
7日前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ファナック株式会社
機械プログラミング方法
13日前
株式会社マキタ
作業ロボット
23日前
三菱電機株式会社
状態推定装置及び移動体制御装置
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ