TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025049824
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023158276
出願日
2023-09-22
発明の名称
多方向入力装置
出願人
ミツミ電機株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05G
9/047 20060101AFI20250327BHJP(制御;調整)
要約
【課題】製品寿命が長く、かつ、操作軸への傾倒操作に対する所望の非線形の反力特性を有する多方向入力装置を提供すること。
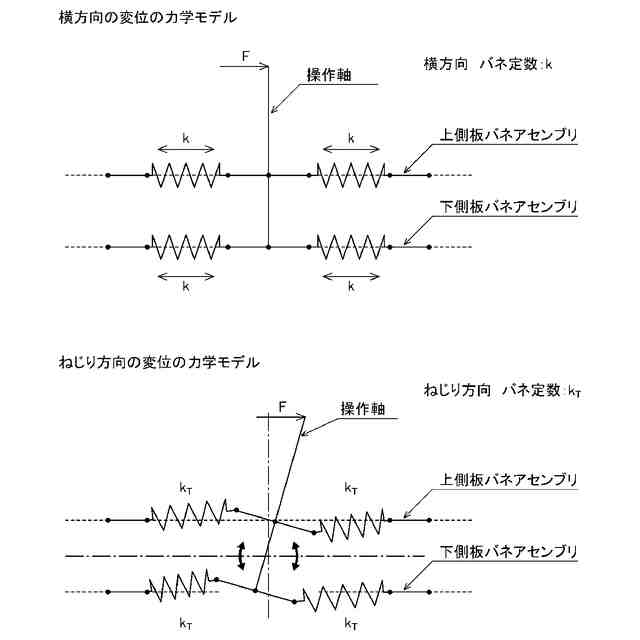
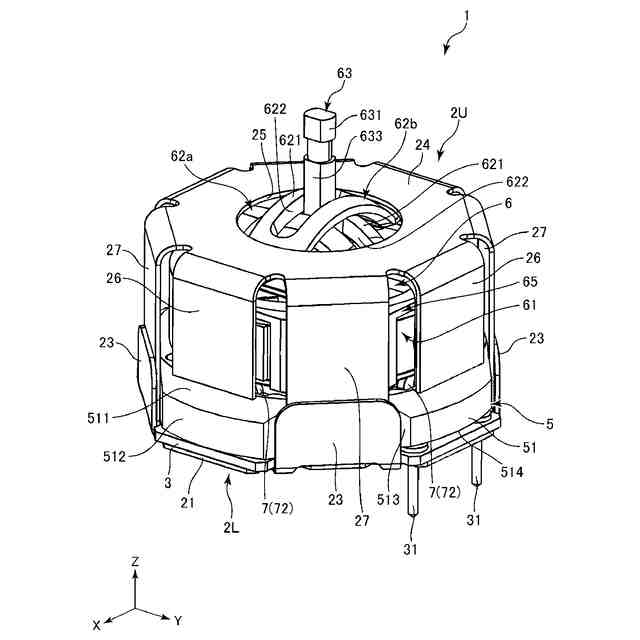
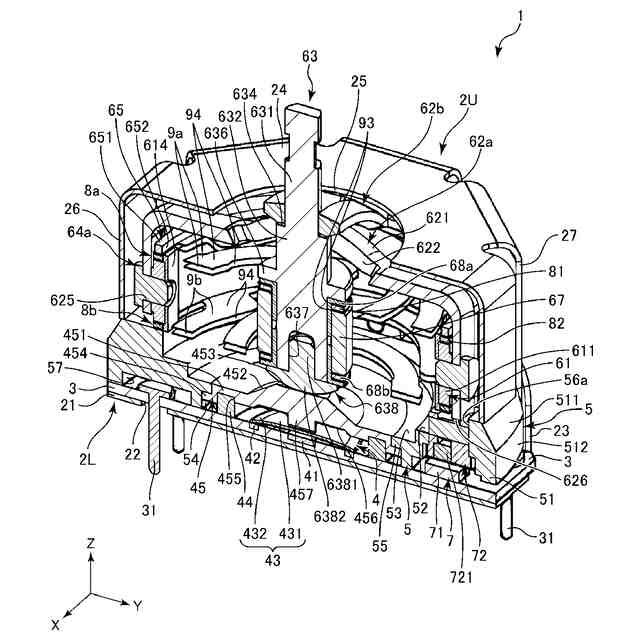
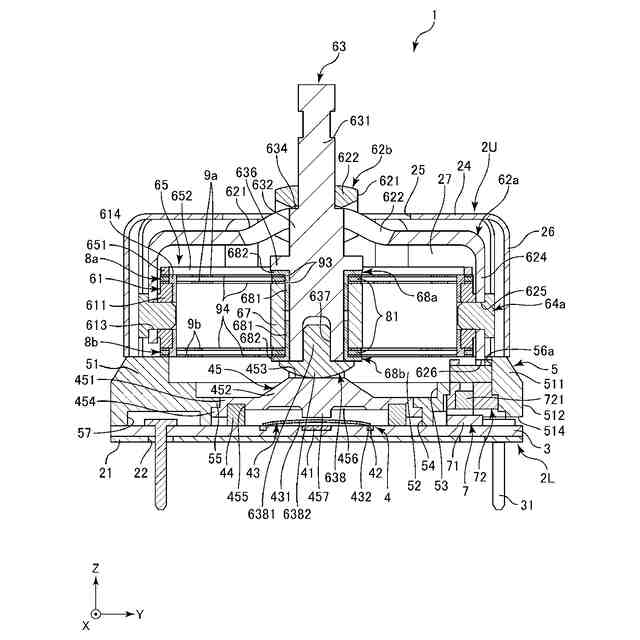
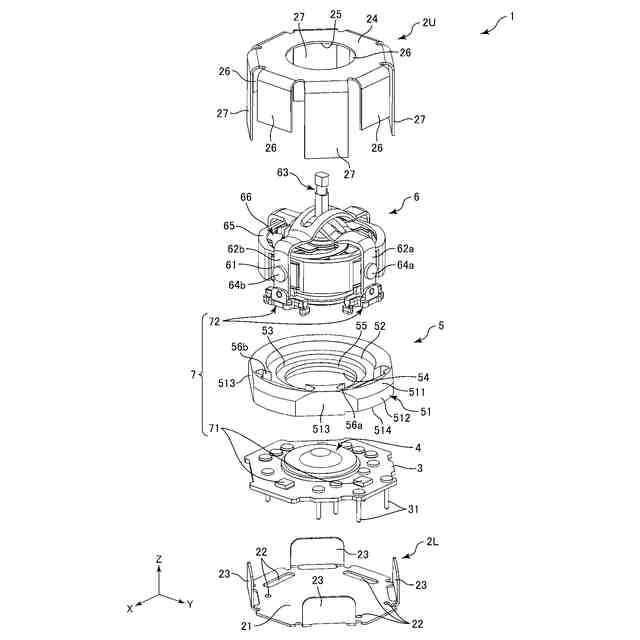
【解決手段】多方向入力装置1は、上側ハウジング61と、第1の回動部材62aと、第2の回動部材62bと、ユーザーから印加される傾倒操作に応じて、第1の回動部材62aおよび第2の回動部材62bを回動させる操作軸63と、上側ハウジング61に保持され、操作軸63を中立状態で弾性的に保持する保持機構66と、を含む。保持機構66は、高さ方向に互いに離間して対向するよう上側ハウジング61に固定的に保持された上側板バネ9aおよび下側板バネ9bを備える。操作軸63の横方向への変位およびねじり方向への変位のそれぞれの運動方程式は、操作軸63に対して印加された力、操作軸63の重量、操作軸63の変位量、時間、および保持機構66のバネ定数によって表される。
【選択図】図18
特許請求の範囲
【請求項1】
ハウジングと、
第1のスリット孔を有し、第1の軸方向回りに回動可能に、前記ハウジングに保持された第1の回動部材と、
第2のスリット孔を有し、前記第1の軸方向と直交する第2の軸方向回りに回動可能に、前記ハウジングに保持された第2の回動部材と、
前記第1のスリット孔および前記第2のスリット孔に挿通され、ユーザーから印加される傾倒操作に応じて、前記第1の回動部材および前記第2の回動部材を回動させる操作軸と、
前記ハウジングに保持され、前記操作軸を中立状態で弾性的に保持する保持機構と、
前記第1の回動部材および前記第2の回動部材のそれぞれの回動角度を検出するための検出機構と、を含み、
前記保持機構は、高さ方向に互いに離間して対向するよう前記ハウジングに固定的に保持された上側板バネおよび下側板バネを備え、
前記上側板バネおよび前記下側板バネのそれぞれは、前記ハウジングによって固定的に保持される外枠と、前記外枠の内側に位置し、挿通孔を有する内枠と、前記外枠に対して前記内枠が変位可能に、前記外枠と前記内枠との間を接続する複数のバネ部と、を備え、
前記操作軸は、前記上側板バネおよび前記下側板バネによって弾性的に保持されており、
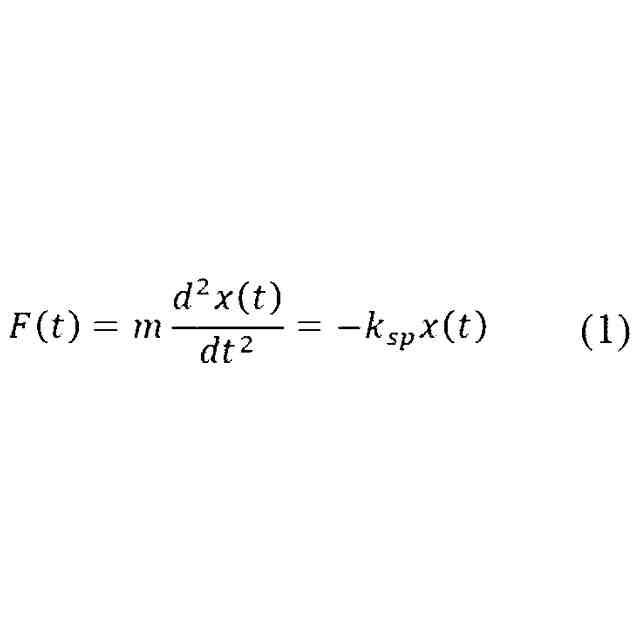
前記ユーザーから印加された前記傾倒操作に応じて実行される前記操作軸の傾倒動作における前記操作軸の横方向への変位および前記操作軸のねじり方向への変位のそれぞれの運動方程式は、下記式(1)により表され、
TIFF
2025049824000004.tif
19
100
前記式(1)中のFは前記操作軸に対して印加された力、mは前記操作軸の重量、xは前記操作軸の変位量、tは時間、k
sp
は前記保持機構のバネ定数であることを特徴とする多方向入力装置。
続きを表示(約 1,200 文字)
【請求項2】
前記上側板バネおよび前記下側板バネのそれぞれの前記複数のバネ部のそれぞれは、
前記外枠に接続される第1の接続部と、
前記内枠に接続される第2の接続部と、
前記第1の接続部と前記第2の接続部との間を接続するよう、円弧状に延伸するアーム部と、を備えている請求項1に記載の多方向入力装置。
【請求項3】
前記上側板バネの前記複数のバネ部のそれぞれの前記アーム部は、前記高さ方向からの平面視において、前記第1の接続部から前記第2の接続部に向かって、時計回り方向および反時計回り方向の一方に円弧状に延伸しており、
前記下側板バネの前記複数のバネ部のそれぞれの前記アーム部は、前記高さ方向からの前記平面視において、前記第1の接続部から前記第2の接続部に向かって、前記時計回り方向および前記反時計回り方向の他方に円弧状に延伸している請求項2に記載の多方向入力装置。
【請求項4】
前記アーム部は、
前記第1の接続部に接続された第1の細幅部と、
前記第2の接続部に接続された第2の細幅部と、
前記第1の細幅部と前記第2の細幅部との間を接続し、前記第1の細幅部と前記第2の細幅部の幅よりも広い幅を有する広幅部と、を備えている請求項2に記載の多方向入力装置。
【請求項5】
前記上側板バネおよび前記下側板バネのそれぞれは、前記外枠の内周面上であって、前記第1の接続部と隣接する部分から前記外枠の径方向に突出するよう形成された係止部をさらに備えている請求項2に記載の多方向入力装置。
【請求項6】
前記複数のバネ部の前記アーム部は、前記外枠および前記内枠との間の空間内において、互いに接触しないよう延伸している請求項2に記載の多方向入力装置。
【請求項7】
前記高さ方向からの平面視において、前記上側板バネの前記第1の接続部が前記下側板バネの前記第1の接続部と重なり、さらに、前記上側板バネの前記第2の接続部が前記下側板バネの前記第2の接続部と重なるよう、前記上側板バネおよび前記下側板バネが設けられている請求項2に記載の多方向入力装置。
【請求項8】
前記上側板バネおよび前記下側板バネのそれぞれの前記複数のバネ部の数は3つ以上である請求項2に記載の多方向入力装置。
【請求項9】
前記上側板バネおよび前記下側板バネは、互いに上下対称に構成されている請求項1に記載の多方向入力装置。
【請求項10】
前記保持機構は、前記高さ方向に互いに離間して対向する複数の前記上側板バネと、前記高さ方向に互いに離間して対向する複数の前記下側板バネと、を含み、
複数の前記上側板バネは、互いに平行に対向しており、
複数の前記下側板バネは、互いに平行に対向している請求項1に記載の多方向入力装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、一般に、多方向入力装置に関し、より具体的には、操作軸に対する傾倒操作に応じた方向情報の入力を提供する多方向入力装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、ゲーム機器等の電子機器に用いられる多方向入力装置として、操作軸に対する傾倒操作が可能な多方向入力装置が知られている。ジョイスティックまたはスティックコントローラーと呼ばれるこの種の多方向入力装置では、ユーザーは、操作軸を中立状態から任意の方向に向けて傾倒させる傾倒操作を実行することにより、操作軸に対する傾倒操作に応じた方向情報の入力を提供する。
【0003】
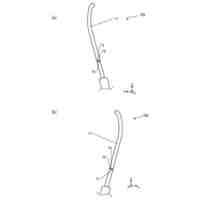
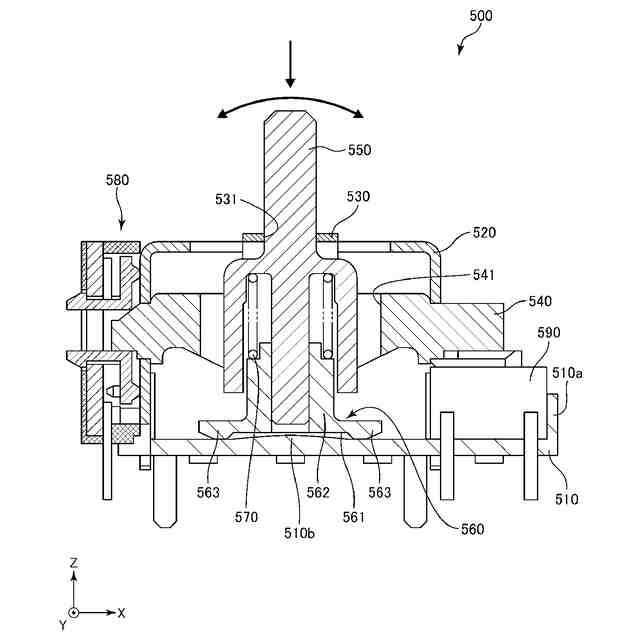
例えば、特許文献1は、図1に示されている多方向入力装置500を開示している。多方向入力装置500は、底板510上に固定されるハウジング520と、第1の軸方向(Y方向)回りに回動可能に、ハウジング520に保持された第1の回動部材530と、第1の軸方向と直交する第2の軸方向(X方向)回りに回動可能に、ハウジング520に保持された第2の回動部材540と、第1の回動部材530のスリット孔531および第2の回動部材540のスリット孔541に挿通され、ユーザーから印加される傾倒操作に応じて、第1の回動部材530および第2の回動部材540を回動させると共に、ユーザーからの押下操作に応じて下方に変位可能な操作軸550と、操作軸550の下端部に、操作軸550の軸方向に沿って移動可能に設けられた作動部材560と、操作軸550と作動部材560との間に設けられたコイルバネ570と、第1の回動部材530および第2の回動部材540の回動角度を検出するためにハウジング520上に設けられたセンサー580と、底板510の一方の側壁から外側に突出する部品取り付け部510a内に設けられたプッシュスイッチ590と、を備えている。
【0004】
ユーザーから操作軸550に対して任意の方向への傾倒操作が印加されると、操作軸550の傾倒動作に伴い、第1の回動部材530および第2の回動部材540が回動する。第1の回動部材530および第2の回動部材540の回動角度は、センサー580によってそれぞれ検出され、操作軸550に対するユーザーの傾倒操作に応じた方向情報の入力が提供される。また、ユーザーから操作軸550に対して押下操作が印加されると、操作軸550と係合している第2の回動部材540が下方に変位し、第2の回動部材540がプッシュスイッチ590を押下する。これにより、操作軸550に対するユーザーの押下操作に応じた押下情報の入力が提供される。
【0005】
作動部材560は、底面が皿状に湾曲された基部561と、基部561の中央部に形成され、操作軸550の下端部が挿入される筒状のボス部562と、基部561の外周部から外側に突出する円弧部563と、を備えている。このような多方向入力装置500では、ユーザーが操作軸550に対して傾倒操作を印加した場合、操作軸550の傾倒角度が小さい初期段階においては、作動部材560が底板510上をスライドする。その後、操作軸550の傾倒角度が一定値を超えると、作動部材560の円弧部563の下面が、底板510上に形成された突部510bに当接しながら作動部材560が傾斜し、コイルバネ570の弾性力に抗して、作動部材560が操作軸550の軸方向に持ち上げられる。その後、操作軸550に対する傾倒操作が解除されると、コイルバネ570の弾性復元力と基部561の底面の形状によって、操作軸550が中立状態に復帰する。このように、作動部材560は、操作軸550を直立の中立状態で弾性的に保持する機能を提供している。
【0006】
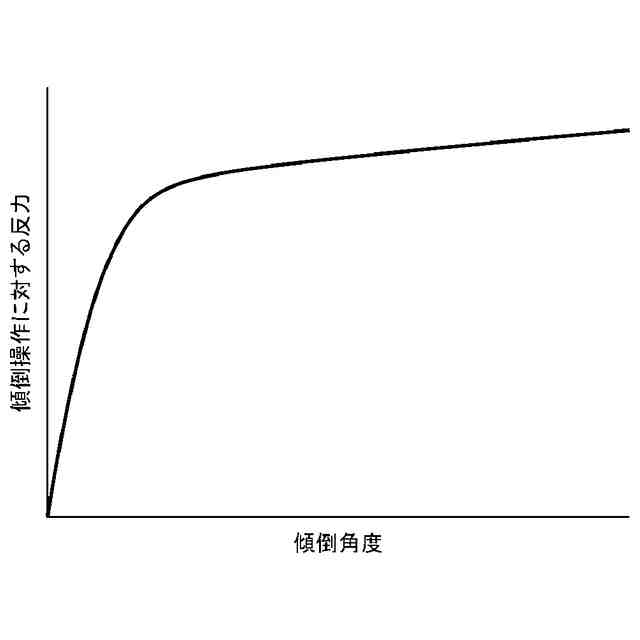
操作軸550の傾倒操作の初期段階においては、作動部材560が底板510上をスライドするため、作動部材560と底板510との間の摩擦によって、操作軸550へのユーザーの傾倒操作に対する強い反力(逆トルク)が生じる。その後、操作軸550の傾倒角度が一定値を超えると、ユーザーの操作軸550に対する傾倒操作に対する反力は、作動部材560の持ち上げ量およびコイルバネ570の弾性力に応じて増加していく。図2は、このような多方向入力装置500における、操作軸550への傾倒操作に対する反力特性を示している。図2に示されているように、ユーザーが操作軸550に対して傾倒操作を印加した場合、操作軸550の傾倒角度が小さい初期段階においては、ユーザーの傾倒操作に対する反力は、操作軸550の傾斜角度の増加に応じて急激に増加する。その後、操作軸550の傾斜角度が一定値を超えると、操作軸550の傾斜角度の増加に対する反力の増加が急激に緩やかになる。
【0007】
このような非線形の反力特性は、多方向入力装置500をゲーム機器のハンドヘルド型コントローラーに用いた場合に、特に有用である。ユーザーがハンドヘルド型コントローラーを操作する際には、ユーザーは、親指等の任意の指で多方向入力装置500に対して傾倒操作を印加するが、傾倒操作とは独立して、他の指によるコントローラーのボタンに対する押下操作等の他の操作を、コントローラーに対して印加する場合がある。コントローラーに対して他の操作を印加する場合、他の指に動作に連動して、ユーザーが意図せず多方向入力装置500に対してわずかな傾倒操作を印加してしまう場合がある。このようなわずかな傾倒操作に対して多方向入力装置500が敏感に応答すると、多方向入力装置500が、ユーザーが意図していない挙動を実行してしまう。上述のような非線形の反力特性は、このようなユーザーが意図していない多方向入力装置500の挙動を防止することができる。
【0008】
しかしながら、多方向入力装置500では、操作軸550が傾倒動作を実行する際に、作動部材560が底板510上をスライドするので、作動部材560と底板510との間に摩擦が生じる。さらに、作動部材560が操作軸550の軸方向に沿って移動するので、作動部材560と操作軸550との間に摩擦が生じる。そのため、操作軸550に対する傾倒操作が繰り返し実行されると、作動部材560が摩耗してしまい、多方向入力装置500の製品寿命が短くなってしまうという問題があった。
【先行技術文献】
【特許文献】
【0009】
特開2000-305650号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
本発明は、上記従来の問題点を鑑みたものであり、その目的は、製品寿命が長く、かつ、操作軸への傾倒操作に対する所望の非線形の反力特性を有する多方向入力装置を提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ミツミ電機株式会社
トルカー及びカテーテル
20日前
ミツミ電機株式会社
モーター駆動装置、及びモーター駆動制御方法
3日前
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
5日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
26日前
トヨタ自動車株式会社
移動体、及び制御方法
3日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社タブチ
減圧弁
20日前
WHILL株式会社
電動モビリティ
4日前
株式会社ダイヘン
搬送車
3日前
日本信号株式会社
自走式装置
10日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社デンソー
診断装置
24日前
井関農機株式会社
作業車両
1か月前
株式会社アイシン
自律移動体
10日前
株式会社アイシン
自律移動体
10日前
株式会社アイシン
自律移動体
10日前
FCLコンポーネント株式会社
電源回路および検出装置
20日前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
株式会社アイシン
自律移動体
10日前
ローム株式会社
バイアス回路
1か月前
ダイハツ工業株式会社
無人搬送車の制御方法
1か月前
株式会社ダイヘン
情報処理装置
3日前
株式会社マキタ
作業ロボット
26日前
三菱電機株式会社
状態推定装置及び移動体制御装置
6日前
ファナック株式会社
機械プログラミング方法
16日前
ローム株式会社
電源起動監視回路
1か月前
個人
自動搬送車
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ