TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025074926
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2024096740
出願日
2024-06-14
発明の名称
自動搬送車
出願人
個人
,
アクセスエンジニアリング株式会社
代理人
個人
,
個人
主分類
G05D
1/435 20240101AFI20250507BHJP(制御;調整)
要約
【課題】
走行経路内に存在する階段を検知すると共に、当該階段と車体との位置関係を単眼カメラの撮像画像から把握することができ、自律走行において階段を安定的に踏破することが可能な自動搬送車を提供することにある。
【解決手段】
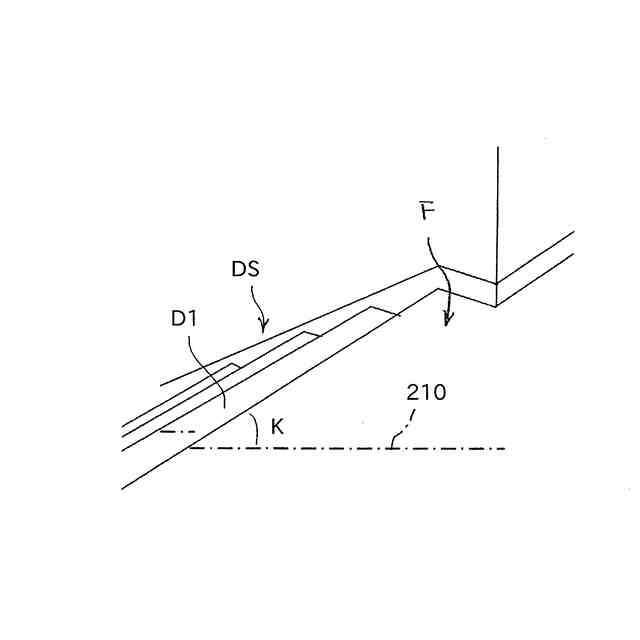
階段を含む走行経路内を自律的に走行して目的地へ移動可能な自動搬送車の走行制御方法であって、前記自動搬送車の車体に固定された単眼カメラで当該自動搬送車の正面方向を撮像すると共に、前記単眼カメラの撮像範囲内の路面に対して当該自動搬送車の正面方向と直交する方向へ延びるレーザーラインを照射し、前記単眼カメラの撮像画像中における前記レーザーラインの変化に基づいて前記階段を検出すると共に、当該階段に対する自動搬送車の進入角度情報を生成し、前記進入角度情報に基づいて前記自動搬送車の進行方向を制御する。
【選択図】 図7
特許請求の範囲
【請求項1】
階段を含む走行経路内を自律的に走行して目的地へ移動可能な自動搬送車の走行制御方法であって、
前記自動搬送車の車体に固定された単眼カメラで当該自動搬送車の正面方向を撮像すると共に、前記単眼カメラの撮像範囲内の路面に対して当該自動搬送車の正面方向と直交する方向へ延びるレーザーラインを照射し、
前記単眼カメラの撮像画像中における前記レーザーラインの変化に基づいて前記階段を検出すると共に、当該階段に対する自動搬送車の進入角度情報を生成し、
前記進入角度情報に基づいて前記自動搬送車の進行方向を制御することを特徴とする自動搬送車の走行制御方法。
続きを表示(約 1,400 文字)
【請求項2】
当該撮像画像中から前記階段の開始位置となるエッジラインを検出し、
前記撮像画像中におけるエッジラインの位置と前記単眼カメラの画角の関係から前記階段に対する自動搬送車の進入角度情報を生成することを特徴とする請求項1記載の自動搬送車の走行制御方法。
【請求項3】
前記単眼カメラの撮像画像中における前記レーザーラインの位置と当該撮像画像を構成する画素との関係から、前記車体と当該車体の前方に位置する階段との水平距離に関する段差距離情報を生成し、
前記段差距離情報に基づいて前記自動搬送車の走行を制御することを特徴とする請求項1記載の自動搬送車の走行制御方法。
【請求項4】
前記車体に搭載された角度検出センサから当該車体のピッチ角度を検出し、
前記ピッチ角度を用いて前記段差距離情報を補正することを特徴とする請求項3記載の自動搬送車の走行制御方法。
【請求項5】
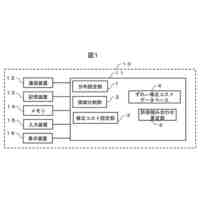
階段を含む走行経路内を自律的に走行して目的地へ移動可能な自動搬送車であって、
車体の左右に少なくとも1基ずつ設けられて当該車体を前記階段に対して昇降させる複数の走行ユニットと、
前記複数の走行ユニットの駆動を制御する走行制御部と、
当該自動搬送車の正面方向を撮像する単眼カメラと、
前記単眼カメラの撮像範囲内の路面に対して当該自動搬送車の正面方向と直交する方向へ延びるレーザーラインを照射するレーザー光源と、
前記単眼カメラの撮像画像中における前記レーザーラインの変換に基づいて前記階段を検出すると共に、当該階段に対する自動搬送車の進入角度情報を生成する検知制御部と、を備え、
前記走行制御部は前記検知制御部から受け取った前記進入角度情報に基づいて前記複数の走行ユニットの駆動を制御することを特徴とする自動搬送車。
【請求項6】
前記検知制御部は、前記単眼カメラの撮像画像中から前記階段の開始位置となるエッジラインを検出し、前記撮像画像中におけるエッジラインの位置と前記単眼カメラの画角の関係から前記階段に対する自動搬送車の進入角度情報を生成することを特徴とする請求項5記載の自動搬送車。
【請求項7】
前記検知制御部は、前記単眼カメラの撮像画像中における前記レーザーラインの位置と当該撮像画像を構成する画素との関係から、前記車体と当該車体の前方に位置する階段との水平距離に関する段差距離情報を生成し、
前記走行制御部は、前記検知制御部から受け取った前記段差距離情報に基づいて前記自動搬送車の走行を制御することを特徴とする請求項5記載の自動搬送車。
【請求項8】
前記車体には当該車体のピッチ角度を検出する角度検出センサが搭載され、
前記検知制御部は検出された前記ピッチ角度を用いて前記段差距離情報を補正することを特徴とする請求項7記載の自動搬送車。
【請求項9】
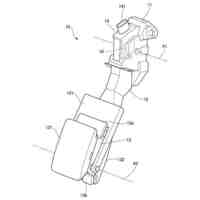
各走行ユニットは、走行駆動源によって自転を与えられて路面を走行可能であると共に回転軸の周囲に等角で配置された三基の走行輪を含むと共に、昇降駆動源によってこれら走行輪を前記回転軸の周囲で公転駆動可能であり、
前記走行制御部は、前記段差距離情報に基づいて前記走行駆動源及び前記公転駆動源の動作を制御することを特徴とする請求項8記載の自動搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、乗員や荷物等を搭載した状態で階段などの段差を含む走行経路内を目的地へ向けて容易に且つ安全に移動することが可能な自動搬送車に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
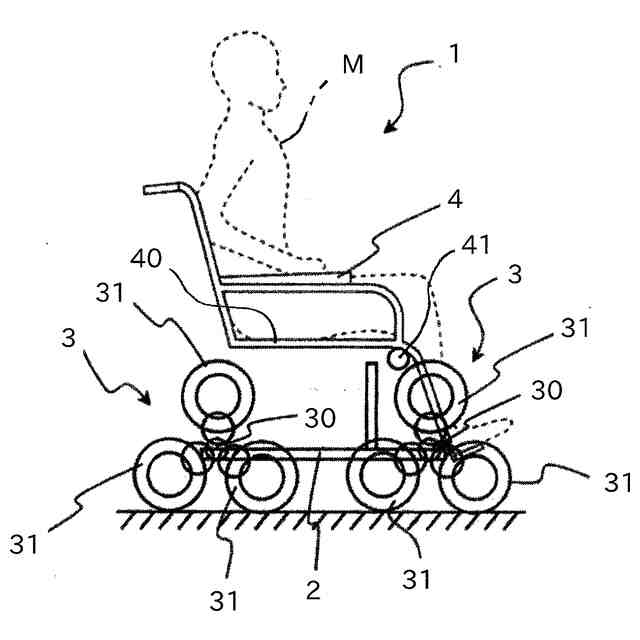
階段などの段差を含む走行経路内を移動可能な自動搬送車の一例としては、特許文献1に開示されるものが知られている。この文献に開示される自動搬送車では、放射状に配置された三基の走行輪を有する走行ユニットが車体の左右に設けられている。三基の走行輪のそれぞれは自ら回転して路面を走行すると共に、前記走行ユニットの回転軸の周囲を公転可能であり、当該走行ユニットを前記回転軸の周囲で適宜回転駆動することにより、三基の走行輪のうちから任意の走行輪を路面に接触させることが可能となっている。
【0003】
平坦な路面では前記走行ユニットに含まれる三基の走行輪のうちの二基を当該路面に接触させ、これら走行輪を回転駆動することにより、安定して路面を走行することが可能である。また、階段などの段差を昇降する際には、前記走行ユニットを回転駆動して前記走行輪を当該走行ユニットの回転軸の周囲で公転させ、路面に接していなかった走行輪を次の段の踏み面に接触させることで、車体を段差上に引き上げ、あるいは段差下に降ろすことが可能となっている。
【0004】
一方、このような自動搬送車が自律走行するためには、走行経路内に存在する段差を検知し、当該段差を踏破できるか否かを判断する必要があり、そのような路面の段差検知方法としては特許文献2に開示されたものが知られている。
【0005】
この特許文献2に開示される段差検知方法では、車体の進行方向を撮像するカメラを設けると共に、このカメラの撮像範囲内の路面に対して車体の進行方向と直交する方向に延びるレーザーラインを照射し、撮像画像内におけるレーザーラインの形状の変化から路面に存在するグレーチングや点字ブロックといった凹状又は凸状の段差を検知している。
【先行技術文献】
【特許文献】
【0006】
特開2012-85854号公報
特開2021-105764号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献2に開示される段差検知方法では、カメラの撮像画像内におけるレーザーラインの形状の変化を把握することで、点字ブロック、排水溝、あるいはグレーチングなどの様々な床面段差を検知するものの、自動搬送車が自律走行するために必要な具体的情報を撮像画像から取得するものではなかった。すなわち、自動搬送車と段差の開始位置との距離、自動搬送車の車体が段差に対して正対しているか否か等は、カメラの撮像画像からは把握できておらず、例えば距離計測のためのレーザーレンジファインダなどの他の機器を自動搬送車に搭載する必要があった。
【課題を解決するための手段】
【0008】
本発明はこのような課題に鑑みなされたものであって、その目的とするところは、走行経路内に存在する階段を検知すると共に、当該階段と車体との位置関係を単眼カメラの撮像画像から把握することができ、自律走行において階段を安定的に踏破することが可能な自動搬送車を提供することにある。
【0009】
すなわち、本発明は階段を含む走行経路内を自律的に走行して目的地へ移動可能な自動搬送車の走行制御方法であって、前記自動搬送車の車体に固定された単眼カメラで当該自動搬送車の正面方向を撮像すると共に、前記単眼カメラの撮像範囲内の路面に対して当該自動搬送車の正面方向と直交する方向へ延びるレーザーラインを照射し、前記単眼カメラの撮像画像中における前記レーザーラインの変化に基づいて前記階段を検出すると共に、当該階段に対する自動搬送車の進入角度情報を生成し、前記進入角度情報に基づいて前記自動搬送車の進行方向を制御するものである。
【0010】
また、本発明は階段を含む走行経路内を自律的に走行して目的地へ移動可能な自動搬送車であって、車体の左右に少なくとも1基ずつ設けられて当該車体を前記階段に対して昇降させる複数の走行ユニットと、前記複数の走行ユニットの駆動を制御する走行制御部と、当該自動搬送車の正面方向を撮像する単眼カメラと、前記単眼カメラの撮像範囲内の路面に対して当該自動搬送車の正面方向と直交する方向へ延びるレーザーラインを照射するレーザー光源と、前記単眼カメラの撮像画像中における前記レーザーラインの変化に基づいて前記階段を検出すると共に、当該階段に対する自動搬送車の進入角度情報を生成する検知制御部と、を備え、前記走行制御部は前記検知制御部から受け取った前記進入角度情報に基づいて前記複数の走行ユニットの駆動を制御するものである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
11日前
株式会社ダイヘン
移動体
16日前
ローム株式会社
半導体集積回路
26日前
三栄ハイテックス株式会社
基準電圧回路
29日前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
11日前
株式会社ダイフク
搬送設備
1か月前
株式会社オプトン
制御プログラム生成装置
9日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社鷺宮製作所
制御装置
10日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイフク
物品搬送設備
2日前
株式会社ダイフク
物品搬送設備
9日前
株式会社ダイフク
物品搬送設備
25日前
株式会社ダイフク
物品搬送設備
9日前
株式会社ダイヘン
負荷時タップ切換器
16日前
株式会社戸張空調
アクセル・ブレーキ操作装置
22日前
シンフォニアテクノロジー株式会社
異常検知装置
9日前
オムロン株式会社
安全装置
9日前
WHILL株式会社
電動モビリティ
1か月前
株式会社計数技研
移動体、及びプログラム
1か月前
ローム株式会社
半導体装置
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社日立製作所
製造工程管理システム
10日前
株式会社アイシン
自律移動体
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
26日前
株式会社大林組
作業機械の自動運転制御システム
25日前
株式会社FUJI
工作機械
12日前
株式会社アイシン
自律移動体
1か月前
株式会社豊田自動織機
無人搬送車両
19日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ