TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042404
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149405
出願日
2023-09-14
発明の名称
リモートI/Oステーション
出願人
株式会社TMEIC
代理人
弁理士法人iX
主分類
G05B
23/02 20060101AFI20250319BHJP(制御;調整)
要約
【課題】PLCの負荷を軽減してプラントの異常の有無を判定するリモートI/Oステーションを提供する。
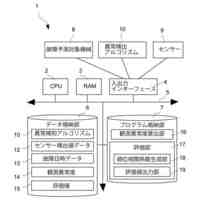
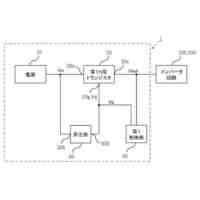
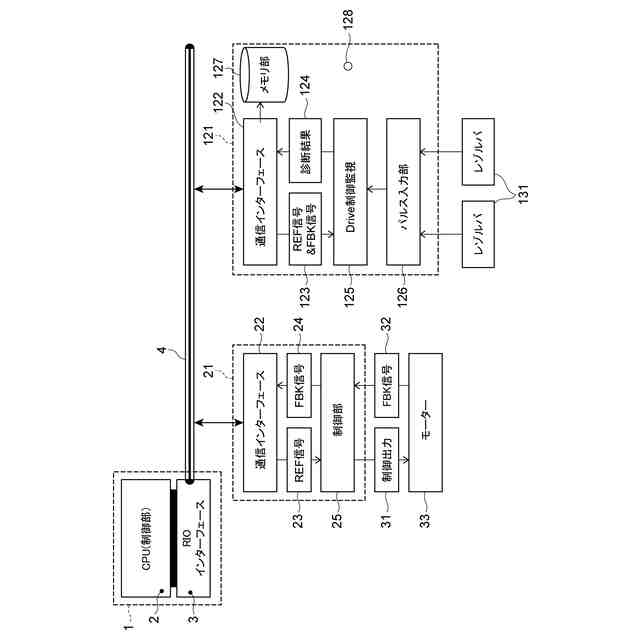
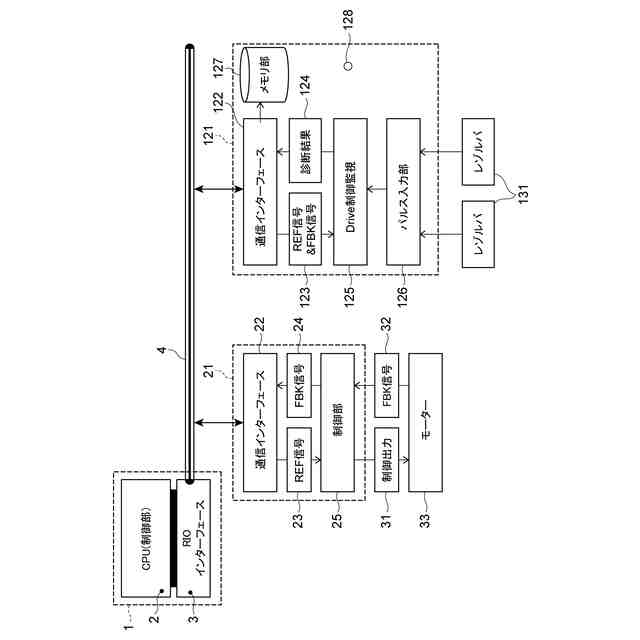
【解決手段】実施形態は、PLCおよび第1装置に接続された通信ネットワークから複数の制御信号を取得する通信インターフェースと、ローカル通信ネットワークから別の制御信号を取得するローカル通信インターフェースと、診断する項目に応じて設定された判定基準と、上記制御信号とにもとづいて、プラントの異常の有無を判定する監視部と、異常があると判定した場合に、その信号を記憶する記憶部と、を備える。
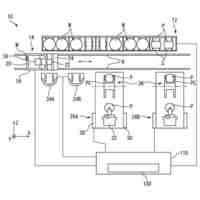
【選択図】図1
特許請求の範囲
【請求項1】
製造物に関連する第1処理を実行する第1装置が通信ネットワークに出力する第1制御信号、および、前記第1装置の運転を制御する制御装置が前記通信ネットワークに出力する第2制御信号を前記通信ネットワークから取得する通信インターフェースと、
ローカル通信ネットワークを介して、前記製造物に関連する第2処理により生成された第3制御信号を取得するローカル通信インターフェースと、
診断する項目に関する所定の判定基準を有し、前記判定基準、ならびに、前記第1制御信号、前記第2制御信号および前記第3制御信号のうちの少なくとも1つにもとづいて、前記第1処理または前記第2処理の異常の有無を診断する監視部と、
前記異常があると診断した時刻の前記第1制御信号、前記第2制御信号および前記第3制御信号のうちの異常を有する信号を記憶する記憶部と、
を備えたリモートI/Oステーション。
続きを表示(約 450 文字)
【請求項2】
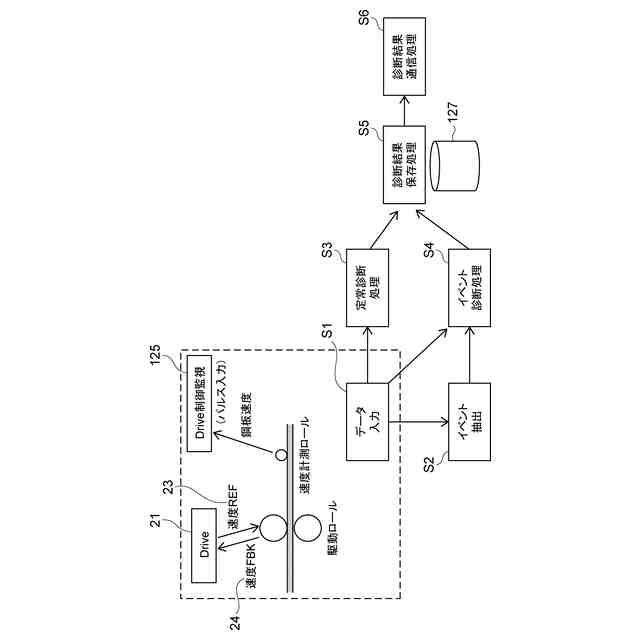
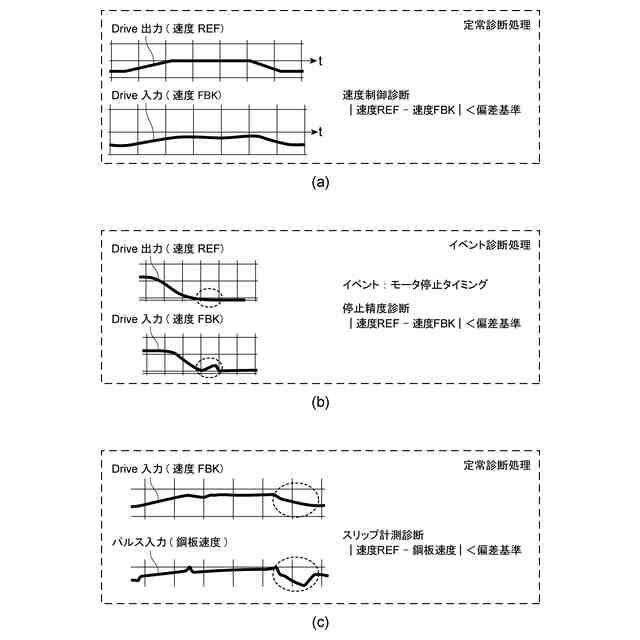
前記第1処理は、モーターの速度制御を含み、
前記第1制御信号は、前記モーターの速度実測値のデータを含み、
前記第2制御信号は、前記モーターの速度指令値のデータを含み、
前記監視部は、前記速度実測値と前記速度指令値との偏差、および、前記判定基準にもとづいて、前記モーターの速度制御の異常の有無を診断する請求項1記載のリモートI/Oステーション。
【請求項3】
前記第2処理は、前記製造物の搬送制御を含み、
前記第3制御信号は、前記製造物の搬送速度のデータを含み、
前記監視部は、前記速度実測値と前記搬送速度との偏差、および、前記判定基準にもとづいて、前記製造物の搬送における異常の有無を診断する請求項2記載のリモートI/Oステーション。
【請求項4】
前記監視部が前記第1処理または前記第2処理において異常と診断した場合に、異常であることを示す警報手段をさらに備えた請求項1記載のリモートI/Oステーション。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、プラント制御システムに用いられるリモートI/Oステーションに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
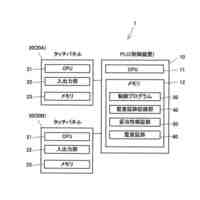
鉄鋼プラント等では、プラント全体の各種機器や各種装置等(以下、機器等)の状況等を監視しながら機器等の動作を制御する。これにより、安全を確保しながら効率のよい生産を実現する。機器等の制御および監視は、プログラマブル・ロジック・コントローラ(以下、PLC)を主として利用する。PLCには、多数の制御対象や監視すべき機器等が接続されることとなり、それらすべての情報を管理するためには、多機能で、複雑かつ大規模なプログラムを要する。
【0003】
たとえば、特許文献1では、大量のプラントデータを収集し、収集したプラントデータの変化点抽出をAI(人工知能)を用いて行うことにより、プラント内の異常の有無を判断する。しかしながら、この技術では、AIは、変化点を抽出するに過ぎず、ユーザーであるプラント監視者は、システムが出力した結果にもとづいて、異常の有無を判断する必要がある。
【0004】
大量のプラントデータのうち制御対象の一部を末端機器が実行することにより、PLCの負荷を減らしながらPLCの設計を簡略化するためのエッジコンピューティングの重要性が増している。エッジコンピューティング技術を適用することによって、PLCの通信負荷を軽減し、PLCの制御プログラムの規模を縮小することが望まれる。
【先行技術文献】
【特許文献】
【0005】
特許第5868784号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の実施形態は、以上のような事情に鑑み、PLCの負荷を軽減してプラントの異常の有無を判定するリモートI/Oステーションを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の実施形態は、製造物に関連する第1処理を実行する第1装置が通信ネットワークに出力する第1制御信号、および、前記第1装置の運転を制御する制御装置が前記通信ネットワークに出力する第2制御信号を前記通信ネットワークから取得する通信インターフェースと、ローカル通信ネットワークを介して、前記製造物に関連する第2処理により生成された第3制御信号を取得するローカル通信インターフェースと、診断する項目に関する所定の判定基準を有し、前記判定基準、ならびに、前記第1制御信号、前記第2制御信号および前記第3制御信号のうちの少なくとも1つにもとづいて、前記第1処理または前記第2処理の異常の有無を診断する監視部と、前記異常があると診断した時刻の前記第1制御信号、前記第2制御信号および前記第3制御信号のうちの異常を有する信号を記憶する記憶部と、を備える。
【発明の効果】
【0008】
実施形態によれば、PLCの負荷を軽減してプラントの異常の有無を判定するリモートI/Oステーションが提供される。
【図面の簡単な説明】
【0009】
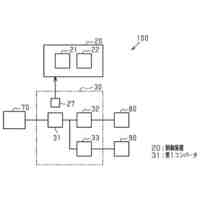
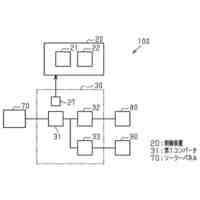
実施形態に係るリモートI/Oステーションを例示する模式的なブロック線図である。
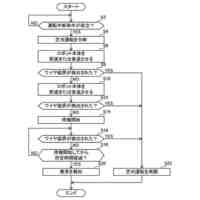
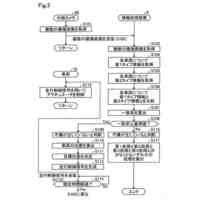
実施形態に係るリモートI/Oステーションの動作を説明するための模式的なフローチャートの例である。
図3(a)~図3(c)は、実施形態に係るリモートI/Oステーションの動作を説明するためグラフ図である。
【発明を実施するための形態】
【0010】
以下、実施の形態について図面を参照しつつ説明する。
なお、図面は模式的または概念的なものであり、各部分の厚みと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。また、同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。
なお、本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
和研工業株式会社
多連レバー機構
10日前
スター精密株式会社
工作機械
26日前
ローム株式会社
半導体集積回路
5日前
愛知機械テクノシステム株式会社
無人搬送車
19日前
アズビル株式会社
制御システムおよび制御方法
11日前
アズビル株式会社
制御システムおよび制御方法
11日前
アズビル株式会社
制御システムおよび制御方法
20日前
日本精工株式会社
制御装置および制御方法
17日前
チームラボ株式会社
走行システム及び走行路
24日前
村田機械株式会社
稼働監視システム及び稼働監視方法
20日前
トヨタ自動車株式会社
群制御システム及び群制御方法
19日前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
17日前
HEROZ株式会社
異常検知アルゴリズムの評価システム
19日前
株式会社マキタ
作業ロボット
25日前
ローム株式会社
レギュレータ回路
4日前
株式会社TMEIC
リモートI/Oステーション
11日前
岩井ファルマテック株式会社
監査証跡の管理システム
6日前
株式会社牧野フライス製作所
生産システム
12日前
トヨタ自動車株式会社
ソーラー発電システムの制御装置
25日前
トヨタ自動車株式会社
ソーラー発電システムの制御装置
21日前
トヨタ自動車株式会社
情報処理装置
21日前
株式会社マキタ
自律移動システム
25日前
日清紡マイクロデバイス株式会社
基準電圧源回路
25日前
新電元工業株式会社
レギュレータ回路及びインバータ回路
3日前
トヨタ自動車株式会社
車両用ペダル装置
4日前
ブラザー工業株式会社
工作機械、制御方法、及びプログラム
26日前
三菱ロジスネクスト株式会社
防衛システム
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ