TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025032709
公報種別
公開特許公報(A)
公開日
2025-03-12
出願番号
2023138144
出願日
2023-08-28
発明の名称
工作機械
出願人
スター精密株式会社
代理人
個人
,
個人
主分類
G05B
19/19 20060101AFI20250305BHJP(制御;調整)
要約
【課題】セミクローズドループの制御が行われる場合において駆動対象の停止位置の精度を向上させることが可能な工作機械を提供する。
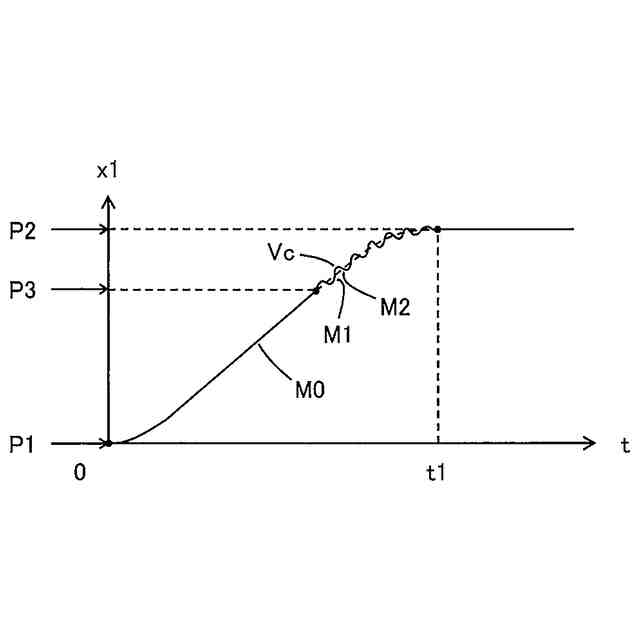
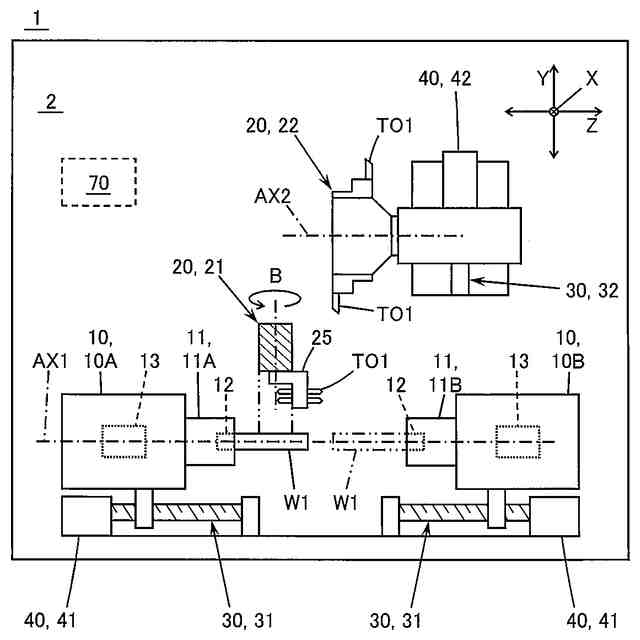
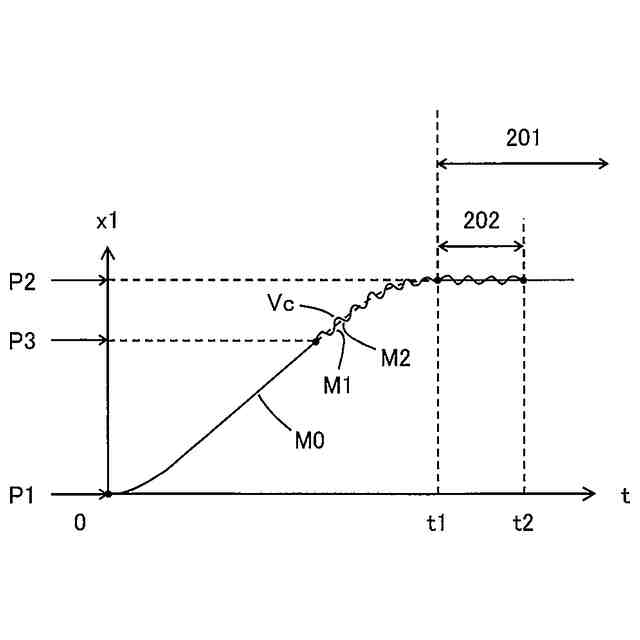
【解決手段】工作機械1は、工具TO1とワークW1の少なくとも一方の駆動対象を案内するための案内機構30、該案内機構30に案内される駆動対象を動かすサーボモーター40、及び、駆動対象を初期位置P1から目標位置P2まで動かすようにセミクローズドループの制御をサーボモーター40に行う制御部U1を備える。制御部U1は、初期位置P1と目標位置P2との間の途中位置P3から目標位置P2まで該目標位置P2に向かう進行動作M1と該進行動作M1とは逆の退行動作M2とを繰り返す振動成分Vcを駆動対象の動きに加えるようにセミクローズドループの制御を行う。
【選択図】図6
特許請求の範囲
【請求項1】
ワークを工具で加工する工作機械であって、
前記工具と前記ワークの少なくとも一方の駆動対象を案内するための案内機構と、
前記案内機構に案内される前記駆動対象を動かすサーボモーターと、
前記駆動対象を初期位置から目標位置まで動かすようにセミクローズドループの制御を前記サーボモーターに行う制御部と、を備え、
前記制御部は、前記初期位置と前記目標位置との間の途中位置から前記目標位置まで該目標位置に向かう進行動作と該進行動作とは逆の退行動作とを繰り返す振動成分を前記駆動対象の動きに加えるように前記セミクローズドループの制御を行う、工作機械。
続きを表示(約 590 文字)
【請求項2】
前記制御部は、前記駆動対象が前記目標位置に到達してから前記目標位置に止まっている期間内の設定期間において前記振動成分を前記駆動対象に加えるように前記セミクローズドループの制御を行う、請求項1に記載の工作機械。
【請求項3】
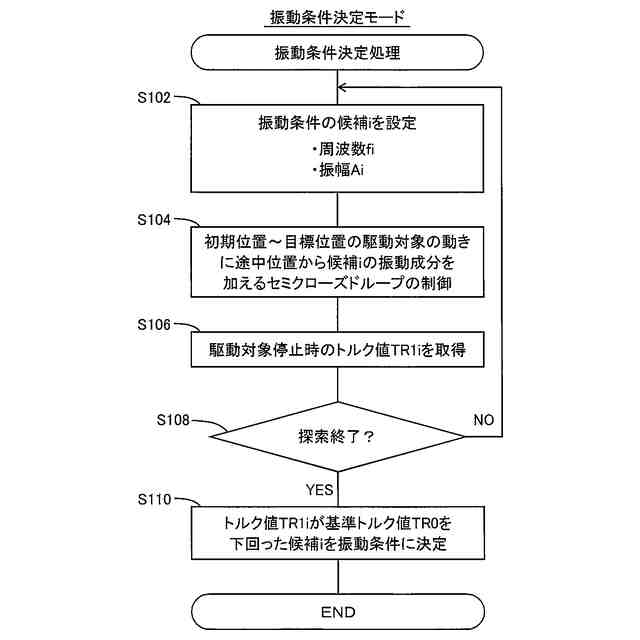
前記制御部は、前記振動成分の振動条件を決定する振動条件決定モードにおいて、前記振動条件の複数の候補のそれぞれについて該候補を前記振動条件として前記セミクローズドループの制御を行って前記駆動対象が前記目標位置に停止した時に前記サーボモーターが発生させるトルクを検出し、前記複数の候補のうち前記トルクが基準トルクを下回った場合の候補を前記振動条件に決定する、請求項1又は請求項2に記載の工作機械。
【請求項4】
前記振動成分の周波数は、前記工作機械において前記駆動対象を保持する部分に共振を生じさせ得る共振周波数帯に含まれる、請求項1又は請求項2に記載の工作機械。
【請求項5】
前記制御部は、前記振動成分の周波数を決定する振動条件決定モードにおいて、掃引周波数の変動を有する電流指令を前記セミクローズドループに入力して前記工作機械において前記駆動対象を保持する部分に生じる共振周波数を検出し、該検出した共振周波数を前記振動成分の周波数に決定する、請求項1又は請求項2に記載の工作機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、セミクローズドループの制御を行う工作機械に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
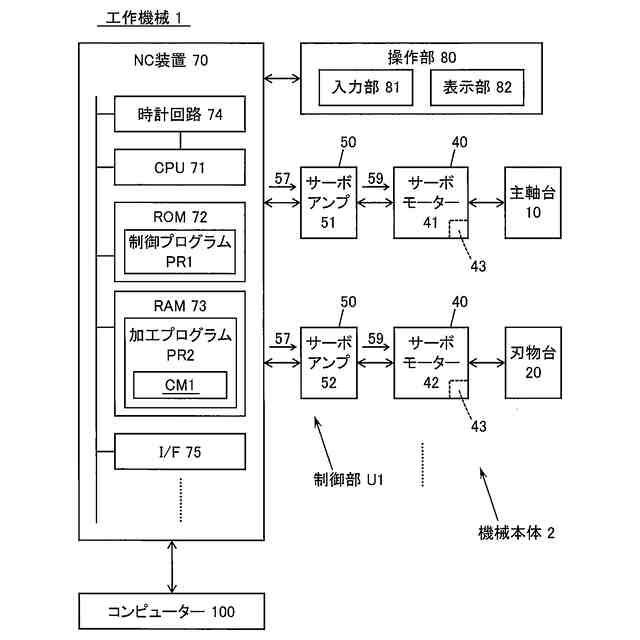
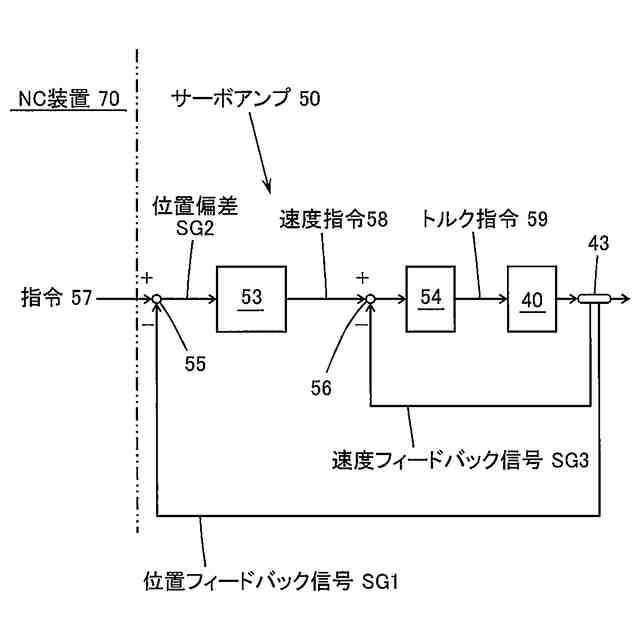
工作機械として、主軸に把持されているワークを工具で切削するNC(数値制御)旋盤が知られている。NC旋盤は、駆動対象である工具やワークの案内機構、内部エンコーダーを有するサーボモーター、サーボアンプ、NC装置、等を備えている。サーボアンプは、NC装置からの位置指令、及び、内部エンコーダーからのフィードバック信号に基づいて、セミクローズドループの制御をサーボモーターに行う(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-25474号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、内部エンコーダーの出力は駆動対象が目標位置に到達したことを示しているにも拘わらず、実際には駆動対象が目標位置から少しずれて停止することがある。駆動対象の停止位置の精度を向上させるために駆動対象の位置を検出するセンサーを追加することは、コストアップに繋がる。そこで、位置検出センサーを追加せず、セミクローズドループの制御が行われる場合において駆動対象の停止位置の精度を向上させることが望まれる。
尚、上述のような課題は、旋盤に限らず、マシニングセンター等、種々の工作機械に存在する。
【0005】
本発明は、セミクローズドループの制御が行われる場合において駆動対象の停止位置の精度を向上させることが可能な工作機械を開示するものである。
【課題を解決するための手段】
【0006】
本発明の工作機械は、ワークを工具で加工する工作機械であって、
前記工具と前記ワークの少なくとも一方の駆動対象を案内するための案内機構と、
前記案内機構に案内される前記駆動対象を動かすサーボモーターと、
前記駆動対象を初期位置から目標位置まで動かすようにセミクローズドループの制御を前記サーボモーターに行う制御部と、を備え、
前記制御部は、前記初期位置と前記目標位置との間の途中位置から前記目標位置まで該目標位置に向かう進行動作と該進行動作とは逆の退行動作とを繰り返す振動成分を前記駆動対象の動きに加えるように前記セミクローズドループの制御を行う、態様を有する。
【発明の効果】
【0007】
本発明によれば、セミクローズドループの制御が行われる場合において駆動対象の停止位置の精度を向上させることが可能な工作機械を提供することができる。
【図面の簡単な説明】
【0008】
工作機械の構成例を模式的に示す図である。
工作機械の電気回路の構成例を模式的に示すブロック図である。
セミクローズドループの制御系の例を模式的に示すブロック図である。
駆動対象における制御位置x1と実際の位置x2との関係の例を模式的に示す図である。
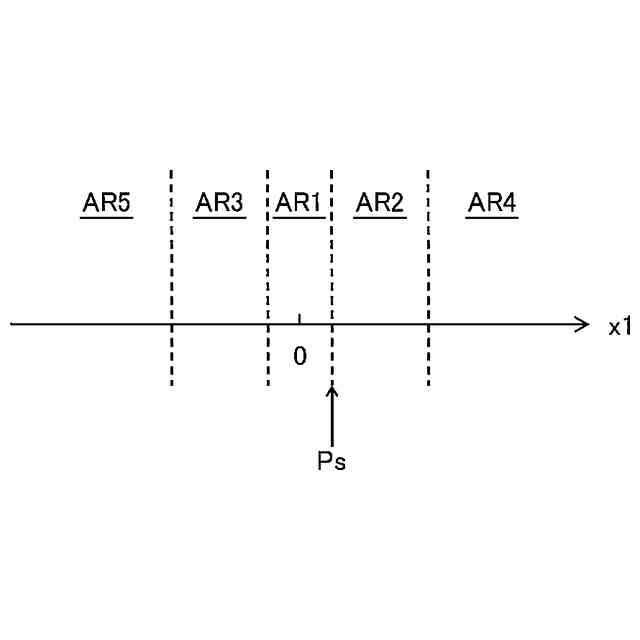
セミクローズドループの制御において基準位置0を中心とした制御位置x1の領域分けの例を模式的に示す図である。
途中位置から目標位置まで振動成分を駆動対象の動きに加える例を模式的に示す図である。
振動成分の例を模式的に示す図である。
駆動対象が目標位置に到達してから設定期間、振動を継続する例を模式的に示す図である。
振動条件決定処理の例を模式的に示すフローチャートである。
掃引周波数の変動を有する電流指令を模式的に示す図である。
周波数fに対する振幅倍率Mの例を模式的に示す図である。
周波数fに対する位相遅れφの例を模式的に示す図である。
周波数決定処理の例を模式的に示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を説明する。むろん、以下の実施形態は本発明を例示するものに過ぎず、実施形態に示す特徴の全てが発明の解決手段に必須になるとは限らない。
【0010】
(1)本発明に含まれる技術の概要:
まず、図1~13に示される例を参照して本発明に含まれる技術の概要を説明する。尚、本願の図は模式的に例を示す図であり、これらの図に示される各方向の拡大率は異なることがあり、各図は整合していないことがある。むろん、本技術の各要素は、符号で示される具体例に限定されない。
また、本願において、数値範囲「Min~Max」は、最小値Min以上、且つ、最大値Max以下を意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
2日前
和研工業株式会社
多連レバー機構
15日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
5日前
ローム株式会社
半導体集積回路
10日前
株式会社ダイフク
搬送車
5日前
エイブリック株式会社
ボルテージレギュレータ
2日前
トヨタ自動車株式会社
工作機械の制御装置
4日前
トヨタ自動車株式会社
工作機械の制御装置
3日前
愛知機械テクノシステム株式会社
無人搬送車
24日前
株式会社ダイフク
物品搬送設備
3日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
アズビル株式会社
制御システムおよび制御方法
16日前
アズビル株式会社
制御システムおよび制御方法
16日前
アズビル株式会社
制御システムおよび制御方法
25日前
日本精工株式会社
制御装置および制御方法
22日前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
2日前
株式会社ダイヘン
搬送車
2日前
株式会社ダイヘン
搬送車
2日前
チームラボ株式会社
走行システム及び走行路
29日前
株式会社ダイヘン
搬送車
2日前
ローム株式会社
半導体装置
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
24日前
日本精工株式会社
制御システムおよび制御方法
1か月前
村田機械株式会社
稼働監視システム及び稼働監視方法
25日前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
ローム株式会社
バイアス回路
4日前
オルガノ株式会社
運転管理方法及び運転管理装置
5日前
ミツミ電機株式会社
多方向入力装置
8日前
ミツミ電機株式会社
多方向入力装置
8日前
ミツミ電機株式会社
多方向入力装置
8日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
8日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ


































