TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029643
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023134377
出願日
2023-08-22
発明の名称
モデル誤差抑制補償器
出願人
国立大学法人広島大学
代理人
個人
主分類
G05B
13/04 20060101AFI20250228BHJP(制御;調整)
要約
【課題】容易に設計、調整可能なモデル誤差抑制補償器を提供する。
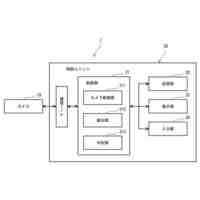
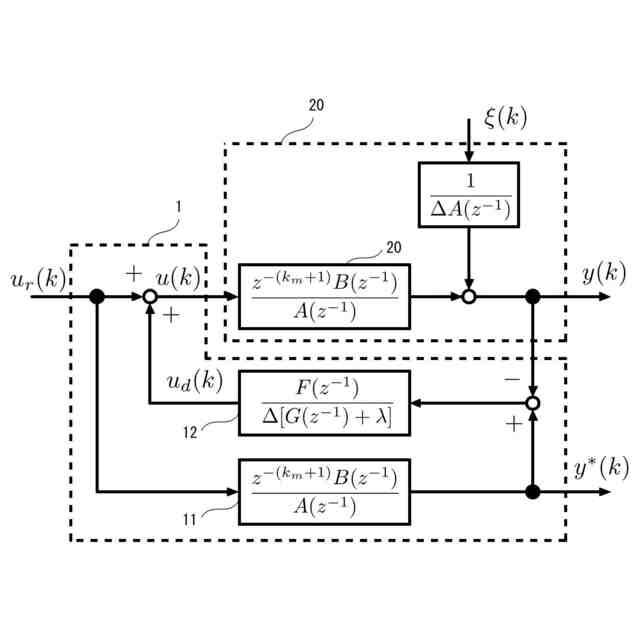
【解決手段】本発明のモデル誤差抑制補償器1は、制御対象の応答特性を表すモデルとして予め設定された制御対象モデル11の出力と、制御対象20の出力との差分に基づいて、制御対象20に入力される制御入力を調整するモデル誤差抑制補償器であって、所定の将来時刻ステップにおける制御対象モデル11の出力と制御対象20の出力との差分、及び制御入力の調整値と可調整パラメータとの積で表される調整項を含む一般化モデル誤差推定値の分散を最小化するように設定される。
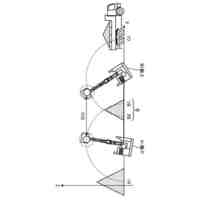
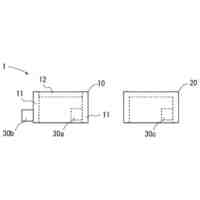
【選択図】図2
特許請求の範囲
【請求項1】
制御対象の応答特性を表すモデルとして予め設定された制御対象モデルの出力と、制御対象の出力との差分に基づいて、制御対象に入力される制御入力を調整するモデル誤差抑制補償器であって、
所定の将来時刻ステップにおける制御対象モデルの出力と制御対象の出力との差分、及び制御入力の調整値と可調整パラメータとの積で表される調整項を含む一般化モデル誤差推定値の分散を最小化するように設定される、
ことを特徴とするモデル誤差抑制補償器。
続きを表示(約 890 文字)
【請求項2】
制御対象モデルの出力と制御対象の出力との差分に基づいて制御入力の調整値を出力するフィルタを備え、
前記フィルタの伝達特性を表す分母多項式は、前記可調整パラメータの項を含む、
ことを特徴とする請求項1に記載のモデル誤差抑制補償器。
【請求項3】
制御対象の応答特性を表すモデルとして予め設定された制御対象モデルの出力と、制御対象の出力との差分に基づいて、制御対象に入力される制御入力を調整するモデル誤差抑制補償器であって、
前記モデル誤差抑制補償器は、
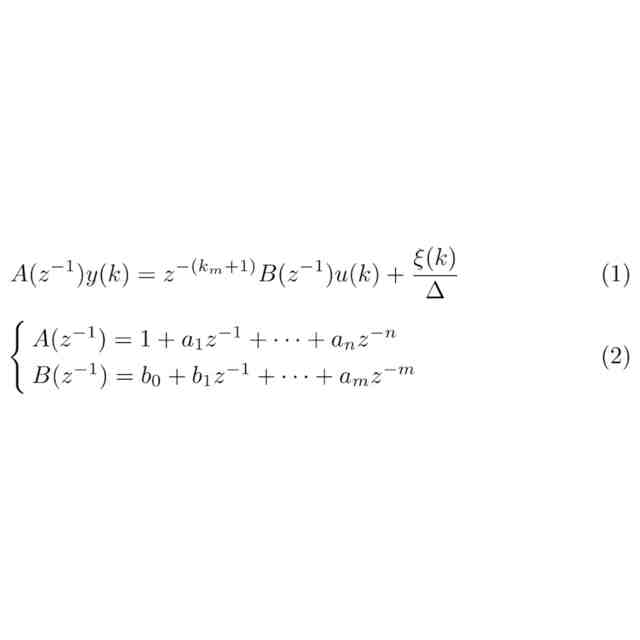
以下の式で表される制御対象について、
JPEG
2025029643000018.jpg
34
170
ただし、A,Bの次数はn,mであり、yは制御対象の出力、uは制御対象の入力、ξは制御対象のモデル誤差、z
-1
は遅延演算子、Δは差分演算子、k
m
は制御対象のむだ時間である。
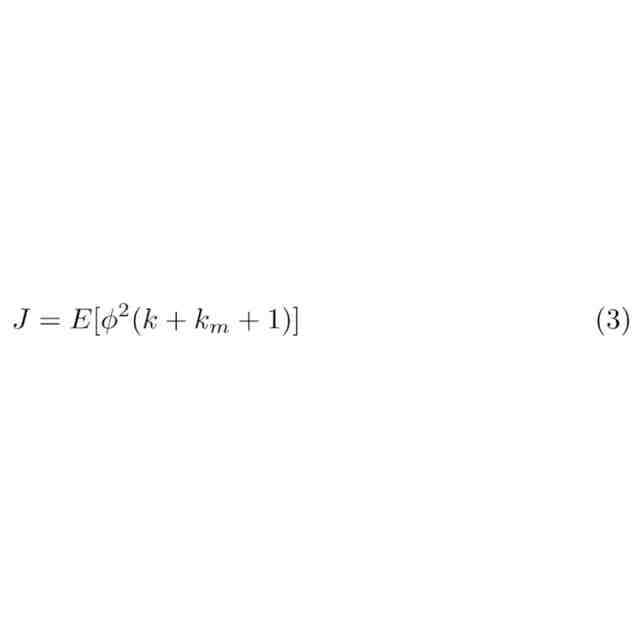
以下の式で表される評価規範を最小化する、
JPEG
2025029643000019.jpg
9
170
ただし、φ(k+k
m
+1)は、以下の式で表される一般化モデル誤差推定値である。
JPEG
2025029643000020.jpg
9
170
ただし、y
*
(k+k
m
+1)は制御対象モデルの出力、u
d
(k)はモデル誤差抑制のための補償入力、λは補償入力の差分に対する重み係数である可調整パラメータである。
ことを特徴とするモデル誤差抑制補償器。
【請求項4】
制御対象モデルの出力と制御対象の出力との差分に基づいて制御入力の調整値を出力するフィルタを備え、
前記フィルタの伝達特性を表す分母多項式は、前記可調整パラメータの項を含む、
ことを特徴とする請求項3に記載のモデル誤差抑制補償器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モデル誤差抑制補償器に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、産業機械、自動車の自動運転等の広い分野において多くのセンサ、アクチュエータを用いた高度な制御システムの開発が進んでいる。このような複雑な制御システムの効率的な開発手法としてモデルベース開発(Model-Based Development:MBD)が用いられている。モデルベース開発においては、制御対象の物理現象などから構築した理想的なモデルに対して制御系設計を行い、設計された制御器を実装することで、所望の制御性能を得ることができる。しかしながら、実際には制御対象とモデルとの間にはズレ(モデル誤差)が生じ、このモデル誤差が制御性能に影響を及ぼすと考えられる。
【0003】
モデル誤差を抑制するための制御系設計手法として、制御系に制御対象のモデルを内包し制御出力とモデル出力との差を利用した、外乱オブザーバ(例えば、特許文献1)、モデル誤差抑制補償器(Model Error Compensator:MEC)(例えば、非特許文献1)等が提案されている。このような補償を行い、モデル誤差を抑制することによって、制御対象の応答特性をモデルの応答特性に近づけることができるので、モデルに対して設計した制御器をそのまま実際の制御対象に適用することが可能となる。外乱オブザーバ及びモデル誤差抑制補償器は、外乱、モデル誤差の抑制に特化した制御系であり、産業界で広く用いられているPID制御等の既存の制御器との併用も可能であるという利点を有する。
【0004】
しかしながら、外乱オブザーバは、制御対象の逆モデルを必要とするという特徴があり、制御対象が厳密にプロパーである場合、制御対象がむだ時間、不安定零点を有する非最小位相系である場合については、プロパー性モデル誤差の抑制性能や安定性を考慮して、適切なフィルタを設計する必要がある。また、制御対象の特性によっては所望の制御性能を得られない可能性がある。これに対し、モデル誤差抑制補償器は、制御対象の逆モデルを必要としないので、むだ時間や不安定零点を持つ非最小位相系を含む幅広い制御対象への適用が可能である。
【先行技術文献】
【特許文献】
【0005】
特開2021-138335号公報
【非特許文献】
【0006】
H.Okajima, H.Umei, N.Matsunaga, T.Asai、”A Design Method of Compensator Minimize Model Error”、 SICE Journal of Control, Measurement, and System Integration、Vol.6, No.4, pp.267-275、2013
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、モデル誤差抑制補償器は、一般的に制御対象の出力とモデルの出力との差分の影響をハイゲインでフィードバックして制御入力(操作量)を調整するように構成されるので、制御対象の特性、モデル誤差等によっては、制御系が不安定になる等、所望の制御特性を得られないおそれがある。したがって、制御対象の特性を考慮して、適切なモデル誤差抑制補償器を設計、調整することは難しい。
【0008】
本発明は、上述の事情に鑑みてなされたものであり、容易に設計、調整可能なモデル誤差抑制補償器を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、この発明の第1の観点に係るモデル誤差抑制補償器は、
制御対象の応答特性を表すモデルとして予め設定された制御対象モデルの出力と、制御対象の出力との差分に基づいて、制御対象に入力される制御入力を調整するモデル誤差抑制補償器であって、
所定の将来時刻ステップにおける制御対象モデルの出力と制御対象の出力との差分、及び制御入力の調整値と可調整パラメータとの積で表される調整項を含む一般化モデル誤差推定値の分散を最小化するように設定される。
【0010】
また、上記のモデル誤差抑制補償器は、
制御対象モデルの出力と制御対象の出力との差分に基づいて制御入力の調整値を出力するフィルタを備え、
前記フィルタの伝達特性を表す分母多項式は、前記可調整パラメータの項を含む、
こととしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人広島大学
腸内菌叢改善剤
4か月前
国立大学法人広島大学
直腸生検補助具
1か月前
国立大学法人広島大学
水素の製造方法
4か月前
国立大学法人広島大学
ゴム組成物の製造方法
2か月前
国立大学法人広島大学
モデル誤差抑制補償器
6か月前
国立大学法人広島大学
多胎動物の人工授精方法
7か月前
国立大学法人広島大学
作業機械の制御システム
6か月前
国立大学法人広島大学
作業機械の制御システム
6か月前
国立大学法人広島大学
肺高血圧症の治療用組成物
2か月前
株式会社明治
分析システム
3か月前
株式会社大林組
土壌改良方法
1か月前
国立大学法人広島大学
メタン発酵菌叢の馴化培養方法
6か月前
国立大学法人広島大学
嚥下能力評価装置及びプログラム
5か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
難水溶性化合物の細胞外小胞搭載方法
4か月前
国立大学法人広島大学
作業支援システムおよび作業支援方法
4か月前
国立大学法人広島大学
生体情報測定器及び生体情報の測定方法
5か月前
株式会社大林組
CO2固定量測定方法
15日前
国立大学法人広島大学
枯草菌並びにそれを含む食品および発酵物
3か月前
三菱ケミカル株式会社
アミンの検出方法
5か月前
国立大学法人広島大学
流体解析方法、流体解析装置及びプログラム
4か月前
株式会社大林組
セメント組成物の製造方法
28日前
株式会社大林組
セメント組成物の製造方法
4か月前
国立大学法人広島大学
画像解析装置、画像解析方法及びプログラム
6か月前
アース製薬株式会社
口内炎発症抑制組成物
6か月前
国立大学法人広島大学
植物生育環境評価装置及び植物生育環境評価方法
4か月前
国立大学法人広島大学
尿管ステント抜去器具及び尿管ステント抜去方法
4か月前
国立大学法人広島大学
入出力予測方法、制御器の設計方法及び制御方法
2か月前
三建産業株式会社
工業炉
2か月前
フジクリーン工業株式会社
発泡ガラス複合材料
5か月前
大陽日酸株式会社
膜分離装置および膜分離方法
5か月前
国立大学法人広島大学
二酸化炭素分離膜の製造方法及び二酸化炭素分離膜
2か月前
国立大学法人大阪大学
気体分析装置、気体分析方法
6か月前
トヨタ自動車株式会社
油膜付燃料及び非混和性油脂
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ