TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025038405
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145019
出願日
2023-09-07
発明の名称
無人搬送車
出願人
愛知機械テクノシステム株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20250312BHJP(制御;調整)
要約
【課題】部品点数の増加やコスト増加を招くことなく、作業エリア内における作業性の向上を図る。
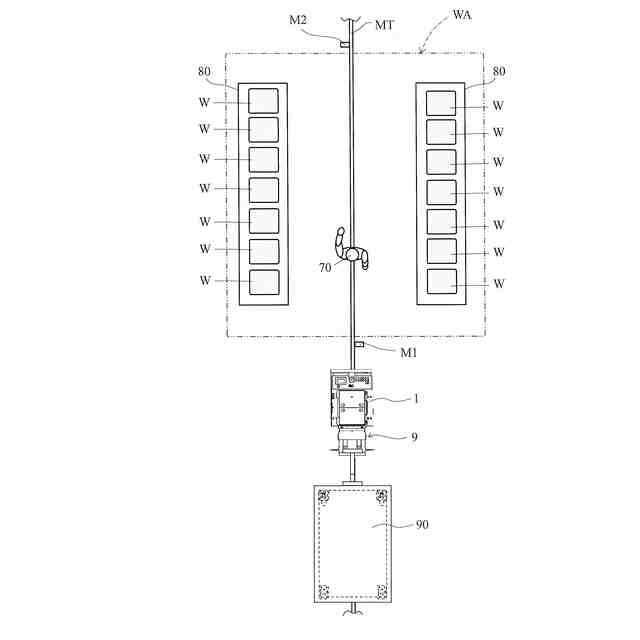
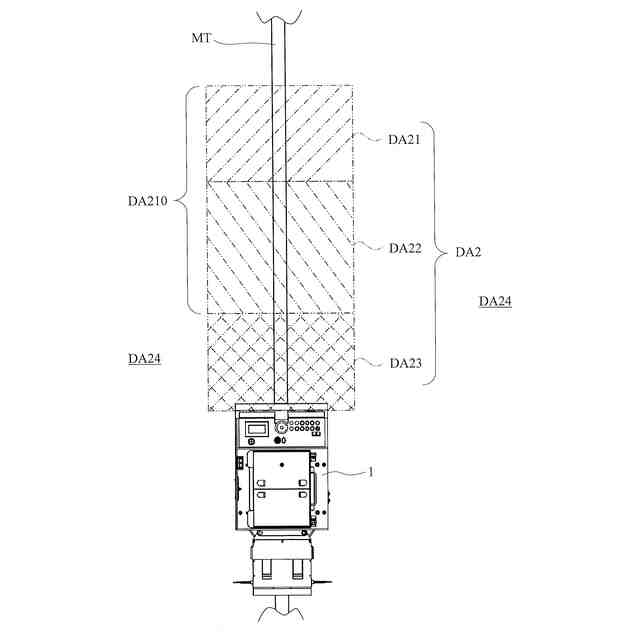
【解決手段】障害物センサの検出エリアを、作業エリアWA外と作業エリア内とで異ならせる。作業エリアWA外では、障害物センサを通常通り、無人搬送車1が物体と接触することを回避させるためのセンサとして用いる。一方、作業エリアWA内では、障害物センサを、無人搬送車1を誘導帯MTに沿って移動する作業者70に追従させるためのセンサとして用いる。これにより、無人搬送車1を作業者70に追従走行させるための専用のセンサが不要になるため、部品点数の削減やコスト低減を図ることができる。なお、作業者70が作業のために、検出エリアDA2から外れたときに、無人搬送車1を停止するため、ピッキングした物品Wを台車90に積み込み易い適切な位置で無人搬送車1を停止させることができる。
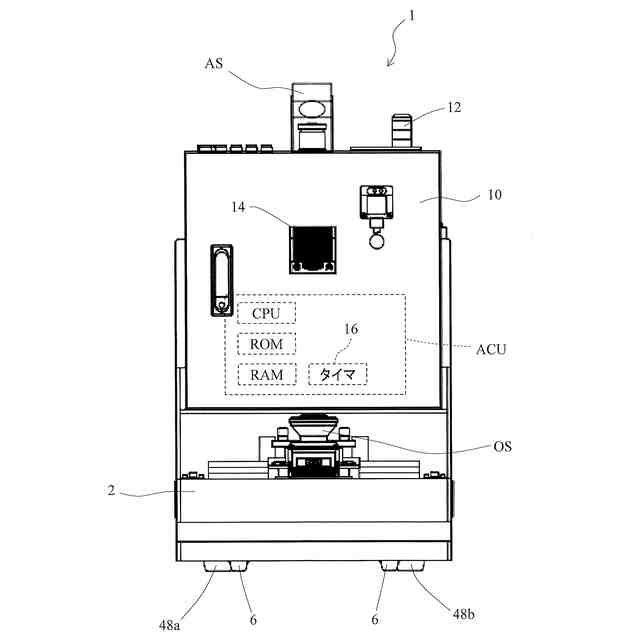
【選択図】図14
特許請求の範囲
【請求項1】
作業エリアを含む経路を走行可能な無人搬送車であって、
車体と、
駆動輪と、鉛直方向に延在する回転軸と、を有し、該回転軸を中心に回転可能に前記車体に支持された駆動ユニットと、
前記経路上の物体を検出可能に前記車体に配置された障害物センサと、
前記車体に配置された制御ユニットと、
を備え、
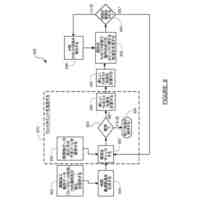
前記制御ユニットは、前記作業エリア外において前記障害物センサが前記物体を検出しないときには、前記無人搬送車が前記経路を走行するよう前記駆動ユニットを制御すると共に、前記作業エリア外において前記障害物センサが前記物体を検出したときには、前記無人搬送車を減速および/または停止するよう前記駆動ユニットを制御する一方、前記作業エリア内において前記障害物センサが前記物体を検出しないときには、前記無人搬送車を停止するよう前記駆動ユニットを制御すると共に、前記作業エリア内において前記障害物センサが前記物体を検出したときであって、前記物体までの距離が第1所定距離よりも大きいときには、前記無人搬送車が前記経路を走行するよう前記駆動ユニットを制御する
無人搬送車。
続きを表示(約 1,100 文字)
【請求項2】
前記制御ユニットは、前記作業エリア内において前記障害物センサが前記物体を検出したときであって、前記物体までの距離が前記第1所定距離以内のときには、前記無人搬送車を停止するよう前記駆動ユニットを制御する
請求項1に記載の無人搬送車。
【請求項3】
前記制御ユニットは、前記作業エリア内において前記障害物センサが前記物体を検出したときであって、前記物体までの距離が第1所定距離よりも大きく、かつ、第2所定距離以内のときには、前記無人搬送車が第1速度で前記経路を走行するよう前記駆動ユニットを制御すると共に、前記物体までの距離が前記第2所定距離よりも大きくなったときには、前記無人搬送車を前記第1速度よりも速い第2速度で前記経路を走行するよう前記駆動ユニットを制御する
請求項2に記載の無人搬送車。
【請求項4】
前記制御ユニットは、前記作業エリア内において前記障害物センサが前記物体を検出したときであって、前記物体までの距離が前記第2所定距離よりも大きい第3所定距離より大きくなったときには、前記無人搬送車を停止するよう前記駆動ユニットを制御する
請求項3に記載の無人搬送車。
【請求項5】
前記障害物センサは、少なくとも前記作業エリア内においては、前記無人搬送車の進行方向に沿う方向に延在するセンシング領域を有する
請求項1ないし4のいずれか1項に記載の無人搬送車。
【請求項6】
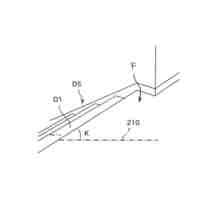
前記センシング領域であって、前記第1所定距離以上前記第3所定距離以下の領域を、前記経路上に視覚的に表示可能な表示部をさらに備える
請求項5に記載の無人搬送車。
【請求項7】
前記経路上であって前記作業エリアの直前および直後に配置された第1および第2マーカーを検出可能なマーカーセンサをさらに備え、
前記制御ユニットは、前記マーカーセンサによって前記第1マーカーが検出されたときに、前記無人搬送車が前記作業エリア内の走行を開始すると判定し、前記マーカーセンサによって前記第2マーカーが検出されたときに、前記無人搬送車が前記作業エリア内の走行を終了すると判定する
請求項1ないし4のいずれか1項に記載の無人搬送車。
【請求項8】
前記無人搬送車が前記作業エリア内の走行を開始してから前記作業エリア内の走行を終了するまでの経過時間を計測可能な計測部と、
視覚的および/または聴覚的に報知可能な報知部と、
をさらに備え、
前記制御ユニットは、前記経過時間が所定時間を超えたときに、前記報知部を作動する
請求項1ないし4のいずれか1項に記載の無人搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業エリアを含む経路を走行可能な無人搬送車に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特開2019-212008号公報(特許文献1)には、通路を移動しながら棚から物品を取出す、所謂ピッキング作業を行う作業者に追従して走行する無人搬送車が記載されている。
【0003】
当該無人搬送車は、作業者を認識可能な認識用レーザを有しており、当該認識用レーザにより検出した作業者と自身(無人搬送車)との距離に基づいて、作業者に対する追尾を停止したり、追尾を再開したりする。これにより、作業者がピッキング作業を行う際の作業性の向上を図っている。
【先行技術文献】
【特許文献】
【0004】
特開2019-212008号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した公報に記載の無人搬送車は、ピッキング作業を行う作業者を認識するための専用のセンサ(認識用レーザ)が必要であり、部品点数削減やコスト低減といった観点において、なお改良の余地がある。
【0006】
本発明は、上記に鑑みてなされたものであり、部品点数の増加やコスト増加を招くことなく、作業エリア内における作業性の向上を図ることが可能な技術を提供することを目的の一つとする。
【課題を解決するための手段】
【0007】
本発明の無人搬送車は、上述の目的を達成するために以下の手段を採った。
【0008】
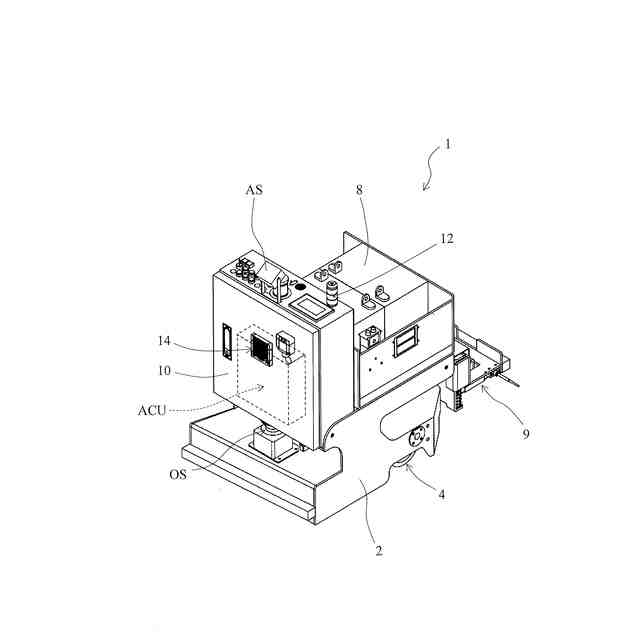
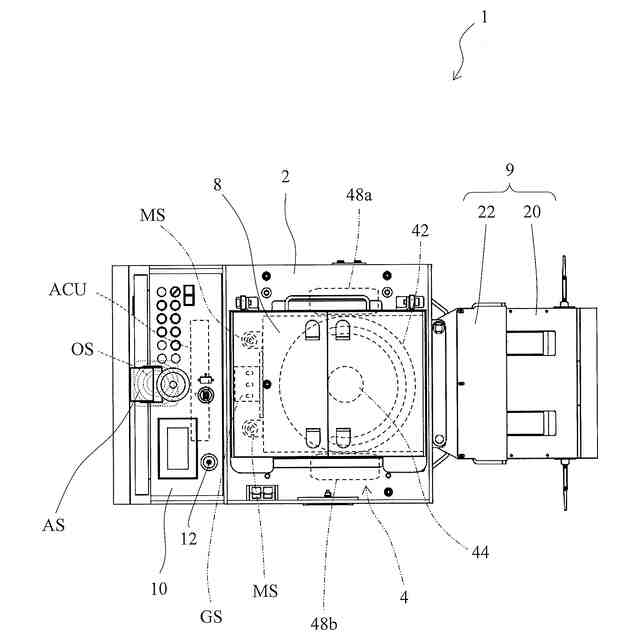
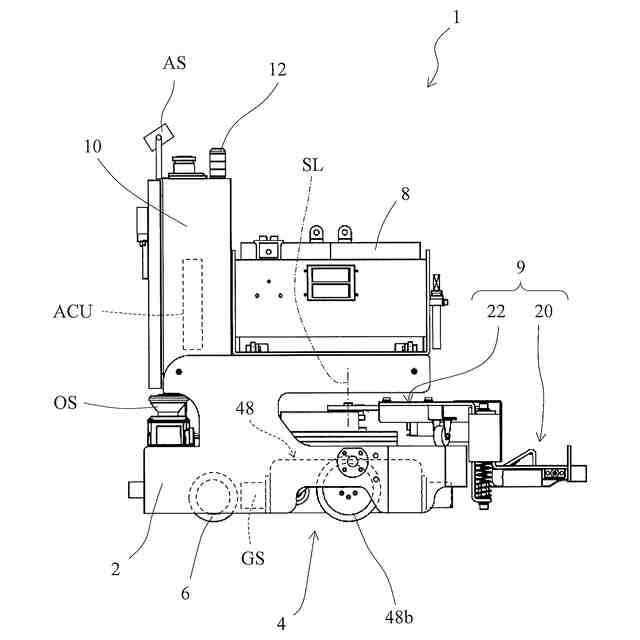
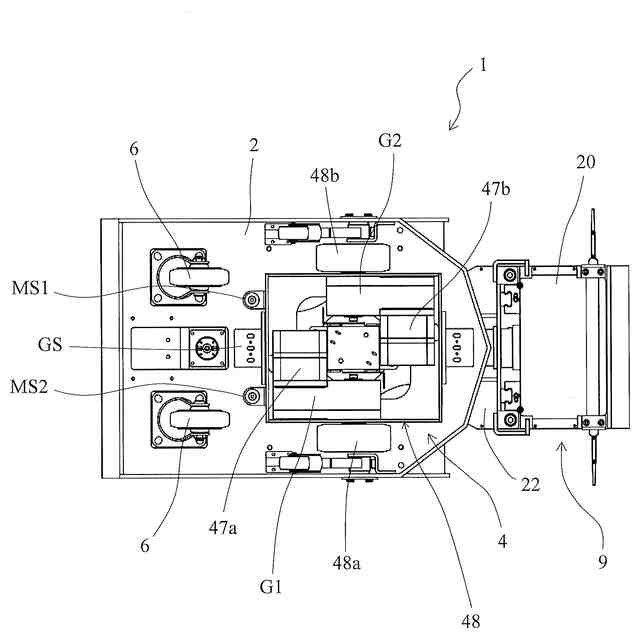
本発明に係る無人搬送車の好ましい形態によれば、作業エリアを含む経路を走行可能な無人搬送車が構成される。当該無人搬送車は、車体と、駆動ユニットと、経路上の物体を検出可能に車体に配置された障害物センサと、車体に配置された制御ユニットと、を備えている。駆動ユニットは、駆動輪と、鉛直方向に延在する回転軸と、を有しており、当該回転軸を中心に回転可能に車体に支持されている。そして、制御ユニットは、作業エリア外において障害物センサが物体を検出しないときには、無人搬送車が経路を走行するように駆動ユニットを制御すると共に、作業エリア外において障害物センサが物体を検出したときには、無人搬送車を減速および/または停止するように駆動ユニットを制御する。一方、制御ユニットは、作業エリア内において障害物センサが物体を検出しないときには、無人搬送車を停止するように駆動ユニットを制御すると共に、作業エリア内において障害物センサが物体を検出したときであって、物体までの距離が第1所定距離よりも大きいときには、無人搬送車が経路を走行するように駆動ユニットを制御する。ここで、本発明における「作業エリア」とは、作業者が所定の作業を行うエリアとして規定され、例えば、作業者が、棚に収容された物品を取出して、当該物品を無人搬送車に牽引された台車に積み込む作業を行うエリアや、逆に、作業者が、無人搬送車に牽引された台車によって搬送されてきた物品を取り出して、当該物品を棚に収容する作業を行うエリアなどがこれに該当する。
【0009】
本発明によれば、作業エリア内において障害物センサが物体、即ち、作業者を検出したときであって、当該作業者までの距離が第1所定距離よりも大きいときには、無人搬送車が経路を走行するように駆動ユニットを制御する構成、即ち、作業エリア内において、無人搬送車を作業者に追従走行させるために当該作業者を認識するセンサとして、障害物センサを用いる構成である。これにより、作業者を認識するための専用のセンサが不要になると共に、作業エリア内において、無人搬送車を作業者に追従走行させることが可能となる。この結果、部品点数の削減やコスト低減を図りながら、作業エリア内における作業性の向上を図ることができる。もとより、無人搬送車が作業エリア外を走行する際には、障害物センサが物体を検出すると、無人搬送車を減速や停止させるため、無人搬送車が経路上の物体に衝突することを良好に防止することができる。
【0010】
本発明に係る無人搬送車の更なる形態によれば、制御ユニットは、作業エリア内において障害物センサが物体を検出したときであって、物体までの距離が第1所定距離以内のときには、無人搬送車を停止するように駆動ユニットを制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
トヨタ自動車株式会社
ペダル機構
2日前
株式会社ダイフク
搬送設備
3日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
三菱電機株式会社
自己位置推定装置
12日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
10日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社タブチ
減圧弁
27日前
WHILL株式会社
電動モビリティ
11日前
株式会社計数技研
移動体、及びプログラム
3日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
10日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
17日前
井関農機株式会社
作業車両
1か月前
株式会社デンソー
診断装置
1か月前
株式会社アイシン
自律移動体
17日前
ローム株式会社
バイアス回路
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
27日前
株式会社アイシン
自律移動体
17日前
株式会社アイシン
自律移動体
17日前
株式会社アイシン
自律移動体
17日前
株式会社マキタ
作業ロボット
1か月前
三菱電機株式会社
状態推定装置及び移動体制御装置
13日前
ダイハツ工業株式会社
無人搬送車の制御方法
1か月前
横河電機株式会社
電流出力装置
4日前
株式会社ダイヘン
情報処理装置
10日前
ファナック株式会社
機械プログラミング方法
23日前
ファナック株式会社
工作機械の迅速な移動計画
23日前
ローム株式会社
電源起動監視回路
1か月前
個人
自動搬送車
11日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ