TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025037386
公報種別
公開特許公報(A)
公開日
2025-03-18
出願番号
2023144292
出願日
2023-09-06
発明の名称
制御システムおよび制御方法
出願人
アズビル株式会社
代理人
個人
主分類
G05B
13/02 20060101AFI20250311BHJP(制御;調整)
要約
【課題】強非線形特性の制御対象に対して良好な制御特性を得る。
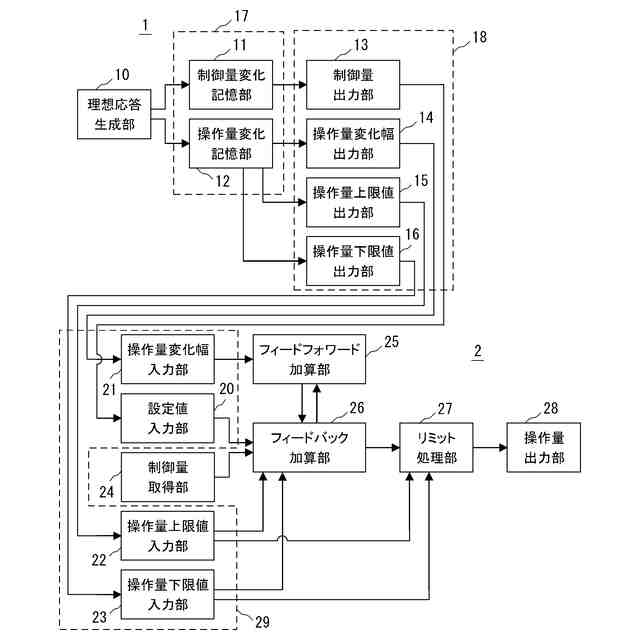
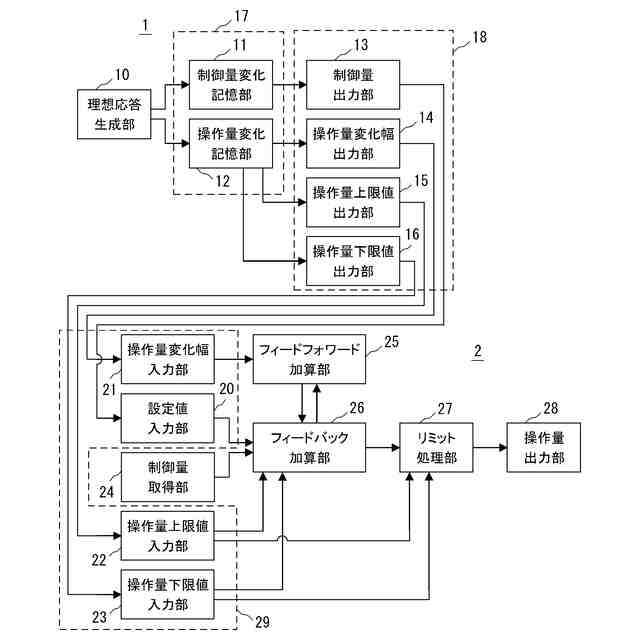
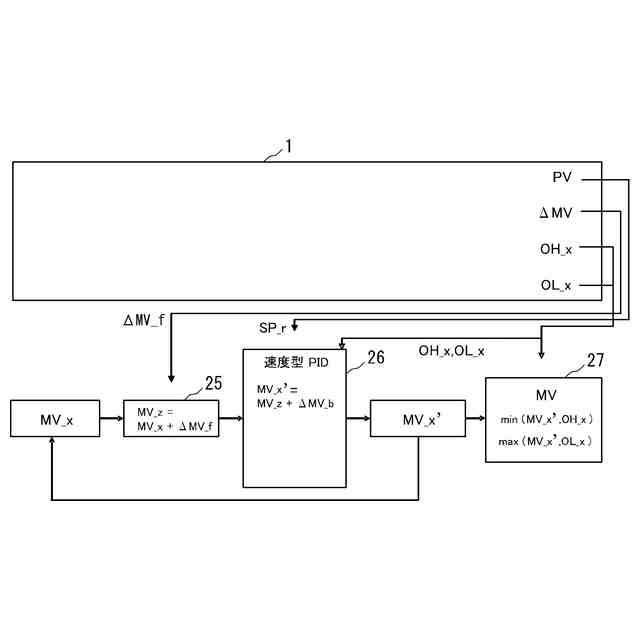
【解決手段】産業用PC1は、理想的な制御応答に相当する制御量と操作量の時系列データを生成し、制御量のデータを送信すると同時に、操作量のデータから算出した操作量変化幅のデータを送信する。PIDコントローラ2は、送信された制御量を参照設定値として受信し、操作量変化幅をフィードフォワード制御操作量の変化幅として受信する受信部29と、1制御周期前の第1の操作量にフィードフォワード制御操作量の変化幅を加算して第2の操作量とするフィードフォワード加算部25と、参照設定値と制御量の計測値に基づいて速度型PID演算を行ってフィードバック制御操作量の変化幅を算出し、この変化幅に第2の操作量を加算して第1の操作量とするフィードバック加算部26と、第1の操作量を制御対象に出力する操作量出力部28を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
ホスト装置とPIDコントローラとから構成され、
前記ホスト装置は、
理想的な制御応答に相当する制御量の時系列データと操作量の時系列データとを生成するように構成された理想応答生成部と、
前記制御量の時系列データと前記操作量の時系列データとを記憶するように構成された記憶部と、
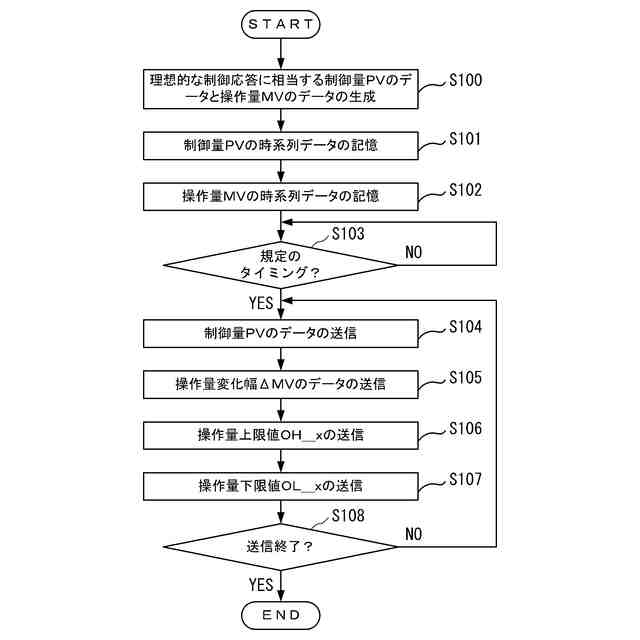
規定のタイミングになったときに、前記記憶部に記憶された時系列データから制御周期毎の制御量のデータを順次取り出して前記PIDコントローラに順次送信すると同時に、前記記憶部に記憶された時系列データから制御周期毎の操作量のデータを順次取り出して、取り出したデータから算出した操作量変化幅のデータを前記PIDコントローラに順次送信するように構成された送信部とを備え、
前記PIDコントローラは、
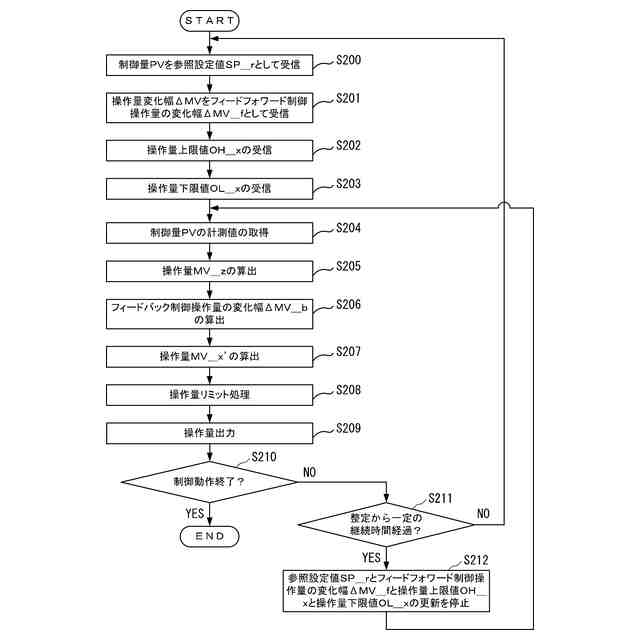
前記ホスト装置から送信された制御量を参照設定値の新たな値として受信すると共に、前記ホスト装置から送信された操作量変化幅をフィードフォワード制御操作量の変化幅の新たな値として受信するように構成された受信部と、
制御量の計測値を取得するように構成された制御量取得部と、
1制御周期前の第1の操作量に、前記受信部が受信した前記フィードフォワード制御操作量の変化幅を加算した値を第2の操作量として算出するように構成されたフィードフォワード加算部と、
前記参照設定値と前記制御量の計測値とを入力として、速度型PID演算を行ってフィードバック制御操作量の変化幅を算出し、前記第2の操作量に前記フィードバック制御操作量の変化幅を加算した値を前記第1の操作量の新たな値として算出するように構成されたフィードバック加算部と、
前記フィードバック加算部によって算出された前記第1の操作量を制御対象に出力するように構成された操作量出力部とを備えることを特徴とする制御システム。
続きを表示(約 2,600 文字)
【請求項2】
請求項1記載の制御システムにおいて、
前記PIDコントローラは、前記フィードバック加算部によって算出された前記第1の操作量を、操作量上限値と操作量下限値の範囲内の値に制限した第3の操作量を出力するように構成されたリミット処理部をさらに備え、
前記ホスト装置の前記送信部は、前記規定のタイミングになったときに、前記制御周期毎の操作量の誤差範囲を想定した前記操作量上限値と前記操作量下限値とを、前記制御量のデータおよび前記操作量変化幅のデータと共に前記PIDコントローラに送信し、
前記PIDコントローラの前記受信部は、前記ホスト装置から送信された前記操作量上限値と前記操作量下限値とを、前記リミット処理部で用いる新たな値として受信し、
前記PIDコントローラの前記操作量出力部は、前記第1の操作量を制御対象に出力する代わりに、前記第3の操作量を制御対象に出力することを特徴とする制御システム。
【請求項3】
請求項2記載の制御システムにおいて、
前記フィードバック加算部は、前記第2の操作量に前記フィードバック制御操作量の変化幅を加算する際に、前記フィードバック制御操作量の変化幅のうちの比例動作と微分動作の成分を前記第2の操作量に加算し、加算結果が前記操作量上限値と前記操作量下限値の範囲内にある場合のみ、前記フィードバック制御操作量の変化幅のうちの積分動作の成分を前記第2の操作量にさらに加算することを特徴とする制御システム。
【請求項4】
請求項2記載の制御システムにおいて、
前記送信部は、前記制御周期毎の操作量に上昇側マージン値を加算した値を前記操作量上限値とし、前記制御周期毎の操作量から下降側マージン値を減算した値を前記操作量下限値とすることを特徴とする制御システム。
【請求項5】
請求項1乃至4のいずれか1項に記載の制御システムにおいて、
前記理想応答生成部は、前記制御対象の挙動をコンピュータ上で再現するための仮想的な制御対象モデルを利用して、理想的な制御応答に相当する制御量の時系列データと操作量の時系列データとを生成することを特徴とする制御システム。
【請求項6】
ホスト装置が、理想的な制御応答に相当する制御量の時系列データと操作量の時系列データとを生成する第1のステップと、
前記ホスト装置が、前記制御量の時系列データと前記操作量の時系列データとを記憶する第2のステップと、
前記ホスト装置が、規定のタイミングになったときに、前記第2のステップで記憶した時系列データから制御周期毎の制御量のデータを順次取り出してPIDコントローラに順次送信すると同時に、前記第2のステップで記憶した時系列データから制御周期毎の操作量のデータを順次取り出して、取り出したデータから算出した操作量変化幅のデータを前記PIDコントローラに順次送信する第3のステップと、
前記PIDコントローラが、前記ホスト装置から送信された制御量を参照設定値の新たな値として受信すると共に、前記ホスト装置から送信された操作量変化幅をフィードフォワード制御操作量の変化幅の新たな値として受信する第4のステップと、
前記PIDコントローラが、制御量の計測値を取得する第5のステップと、
前記PIDコントローラが、1制御周期前の第1の操作量に、前記フィードフォワード制御操作量の変化幅を加算した値を第2の操作量として算出する第6のステップと、
前記PIDコントローラが、前記参照設定値と前記制御量の計測値とを入力として、速度型PID演算を行ってフィードバック制御操作量の変化幅を算出し、前記第2の操作量に前記フィードバック制御操作量の変化幅を加算した値を前記第1の操作量の新たな値として算出する第7のステップと、
前記PIDコントローラが、前記第7のステップによって算出した前記第1の操作量を制御対象に出力する第8のステップとを含むことを特徴とする制御方法。
【請求項7】
請求項6記載の制御方法において、
前記第7のステップによって算出された前記第1の操作量を、操作量上限値と操作量下限値の範囲内の値に制限した第3の操作量を出力する第9のステップをさらに含み、
前記第3のステップは、前記規定のタイミングになったときに、前記制御周期毎の操作量の誤差範囲を想定した前記操作量上限値と前記操作量下限値とを、前記制御量のデータおよび前記操作量変化幅のデータと共に前記PIDコントローラに送信するステップを含み、
前記第4のステップは、前記ホスト装置から送信された前記操作量上限値と前記操作量下限値とを、前記第9のステップで用いる新たな値として受信するステップを含み、
前記第8のステップは、前記第1の操作量を制御対象に出力する代わりに、前記第3の操作量を制御対象に出力するステップを含むことを特徴とする制御方法。
【請求項8】
請求項7記載の制御方法において、
前記第7のステップは、前記第2の操作量に前記フィードバック制御操作量の変化幅を加算する際に、前記フィードバック制御操作量の変化幅のうちの比例動作と微分動作の成分を前記第2の操作量に加算し、加算結果が前記操作量上限値と前記操作量下限値の範囲内にある場合のみ、前記フィードバック制御操作量の変化幅のうちの積分動作の成分を前記第2の操作量にさらに加算するステップを含むことを特徴とする制御方法。
【請求項9】
請求項7記載の制御方法において、
前記第3のステップは、前記制御周期毎の操作量に上昇側マージン値を加算した値を前記操作量上限値とし、前記制御周期毎の操作量から下降側マージン値を減算した値を前記操作量下限値とするステップを含むことを特徴とする制御方法。
【請求項10】
請求項6乃至9のいずれか1項に記載の制御方法において、
前記第1のステップは、前記制御対象の挙動をコンピュータ上で再現するための仮想的な制御対象モデルを利用して、理想的な制御応答に相当する制御量の時系列データと操作量の時系列データとを生成するステップを含むことを特徴とする制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、フィードバック制御とフィードフォワード制御とを併用する制御システムおよび制御方法に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
PID制御について、設定値SPを変更した際の制御性能を好適に維持するためのPIDパラメータの自動調整技術が開示されている(特許文献1参照)。このPIDパラメータ調整技術は、温度制御を行なうためのPIDコントローラである温調計に適用可能である。また、制御量PVの目標軌道に追従するように、PIDパラメータを探索する方法であり、理論上は線形特性の制御対象を想定した方法である。
【0003】
線形特性とは、図21に示すようにグラフの横軸に理論上の操作量MVの出力値0%~100%を取り、縦軸に実際の制御対象への出力作用0%~100%を取ったときに、理論上の操作量MVと実際の制御対象への出力作用との関係が直線になるような特性のことを言う。ただし、例えば図22に示すような若干の非線形特性(弱非線形特性)は、PID制御の許容範囲として、特許文献1に開示された技術を適用できる。
【0004】
特許文献1に開示された手法では、理論と実際の関係が例えば図23に示すような強非線形特性の制御対象に対しては、PID制御の良好な性能を維持できない。このような強非線形特性は、特殊な電気ヒータを使用する温度制御系、あるいはバルブで流体を制御する流量制御系や圧力制御系に現れる。
【0005】
そこで図24~図26に、操作量MV(ヒータ出力)が0%で、制御量PV(温度)が50℃で整定している状態から、異なる目標温度(設定値SP)にPID制御で昇温したときのシミュレーション結果を示す。これらのシミュレーションでは、図24に示す50℃から150℃へ昇温する場合において、制御量PVが目標温度に追従するようにPIDパラメータが調整されている。
【0006】
ここで、図25に示すように50℃から250℃へ昇温する場合に、図24の場合と同じPIDパラメータであれば、制御量PVに上下動が発生してしまう。同様に、図26に示すように50℃から350℃へ昇温する場合に、図24の場合と同じPIDパラメータであれば、制御量PVにさらに大きな上下動が発生してしまう。制御量PVに上下動が発生する理由は、図27に示すように、図24~図26の各目標温度に維持するための操作量MV(図24の場合で約70%、図25の場合で約80%,図26の場合で約90%)の理論と実際の傾きが異なることが原因であり、傾きが大きいほど上下動が発生し易くなる。
【0007】
以上のように、例えば強非線形特性の制御対象に対して、PID制御では良好な制御特性を得ることは難しい。一方で、PID制御ループは安定・安全な制御動作の継続を目的として、PID演算専用のPIDコントローラ(温調計など)で実行することが、産業界の、特に製造装置内における標準的な計装コンセプトでもある。すなわち、PIDコントローラが活用されるべき理由を維持しながら、PID制御の限界を超えなければならないということであり、改善が求められている。
【先行技術文献】
【特許文献】
【0008】
特許第4223894号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、上記課題を解決するためになされたもので、強非線形特性の制御対象に対して良好な制御特性が得られる制御システムおよび制御方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の制御システムは、ホスト装置とPIDコントローラとから構成され、前記ホスト装置は、理想的な制御応答に相当する制御量の時系列データと操作量の時系列データとを生成するように構成された理想応答生成部と、前記制御量の時系列データと前記操作量の時系列データとを記憶するように構成された記憶部と、規定のタイミングになったときに、前記記憶部に記憶された時系列データから制御周期毎の制御量のデータを順次取り出して前記PIDコントローラに順次送信すると同時に、前記記憶部に記憶された時系列データから制御周期毎の操作量のデータを順次取り出して、取り出したデータから算出した操作量変化幅のデータを前記PIDコントローラに順次送信するように構成された送信部とを備え、前記PIDコントローラは、前記ホスト装置から送信された制御量を参照設定値の新たな値として受信すると共に、前記ホスト装置から送信された操作量変化幅をフィードフォワード制御操作量の変化幅の新たな値として受信するように構成された受信部と、制御量の計測値を取得するように構成された制御量取得部と、1制御周期前の第1の操作量に、前記受信部が受信した前記フィードフォワード制御操作量の変化幅を加算した値を第2の操作量として算出するように構成されたフィードフォワード加算部と、前記参照設定値と前記制御量の計測値とを入力として、速度型PID演算を行ってフィードバック制御操作量の変化幅を算出し、前記第2の操作量に前記フィードバック制御操作量の変化幅を加算した値を前記第1の操作量の新たな値として算出するように構成されたフィードバック加算部と、前記フィードバック加算部によって算出された前記第1の操作量を制御対象に出力するように構成された操作量出力部とを備えることを特徴とするものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
16日前
和研工業株式会社
多連レバー機構
29日前
株式会社クボタ
作業車
19日前
ローム株式会社
半導体集積回路
24日前
株式会社ダイフク
搬送車
19日前
エイブリック株式会社
ボルテージレギュレータ
16日前
トヨタ自動車株式会社
工作機械の制御装置
17日前
トヨタ自動車株式会社
工作機械の制御装置
18日前
株式会社やまびこ
走行制御装置
4日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社ダイフク
物品搬送設備
17日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
株式会社ダイヘン
搬送車
16日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
井関農機株式会社
作業車両
12日前
株式会社デンソー
診断装置
2日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
22日前
ローム株式会社
バイアス回路
18日前
ミツミ電機株式会社
多方向入力装置
22日前
オルガノ株式会社
運転管理方法及び運転管理装置
19日前
ミツミ電機株式会社
多方向入力装置
22日前
ミツミ電機株式会社
多方向入力装置
22日前
ダイハツ工業株式会社
無人搬送車の制御方法
17日前
株式会社マキタ
作業ロボット
4日前
HEROZ株式会社
異常検知アルゴリズムの評価システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ