TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025034842
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141493
出願日
2023-08-31
発明の名称
作業ロボット
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
G05D
1/43 20240101AFI20250306BHJP(制御;調整)
要約
【課題】作業ロボットによる作業を円滑に進行させることが可能な技術を提供する。
【解決手段】作業ロボットは、ロボット本体と、移動部と、作業部と、ロボット本体に支持される磁気センサと、制御部と、を備える。制御部は、移動部によってロボット本体を移動させながら作業部による作業を行う作業運転を実行可能に構成される。制御部は、作業運転の実行中、所定の運転中断条件が成立する場合、作業運転を中断する運転中断処理と、運転中断処理の後、移動部によってロボット本体を第1直進方向に向けて第1距離だけ直進させるとともに磁気センサにおいてワイヤ磁界が検出されたか否かを判定する第1磁界探索処理と、運転中断処理によって作業運転が中断された後、磁気センサにおいてワイヤ磁界が検出される場合、作業運転を再開する運転再開処理と、を実行可能に構成される。
【選択図】図9
特許請求の範囲
【請求項1】
ワイヤが設置された作業場において使用され、前記ワイヤの周囲に発生するワイヤ磁界に基づいて移動しながら作業を行う作業ロボットであって、
ロボット本体と、
前記ロボット本体を移動させる移動部と、
前記ロボット本体に支持される作業部と、
前記ロボット本体に支持される磁気センサと、
制御部と、を備えており、
前記制御部は、前記移動部によって前記ロボット本体を移動させながら、前記作業部による作業を行う作業運転を実行可能に構成されており、
前記制御部は、前記作業運転の実行中、
所定の運転中断条件が成立する場合、前記作業運転を中断する運転中断処理と、
前記運転中断処理の後、前記移動部によって前記ロボット本体を第1直進方向に向けて第1距離だけ直進させるとともに、
前記磁気センサにおいて前記ワイヤ磁界が検出されたか否かを判定する第1磁界探索処理と、
前記運転中断処理によって前記作業運転が中断された後に、前記磁気センサにおいて前記ワイヤ磁界が検出される場合、前記作業運転を再開する運転再開処理と、を実行可能に構成される、作業ロボット。
続きを表示(約 1,000 文字)
【請求項2】
前記運転中断条件は、前記磁気センサにおいて前記ワイヤ磁界が検出されなくなることを含む、請求項1の作業ロボット。
【請求項3】
複数の前記磁気センサを備えており、
前記運転中断条件は、複数の前記磁気センサのうち所定数以上の前記磁気センサにおいて前記ワイヤ磁界が検出されなくなることを含んでおり、
前記所定数は、複数の前記磁気センサの総数の半分よりも多い、請求項1の作業ロボット。
【請求項4】
前記ワイヤ磁界は、前記ワイヤに所定の電気信号が印加されることによって発生するワイヤ磁気信号を含んでおり、
前記制御部は、前記ワイヤ磁気信号の信号モデルを予め記憶しており、
前記制御部は、前記磁気センサにおいて観測される磁気信号と、前記ワイヤ磁気信号の前記信号モデルと、が一致または類似する場合に、前記磁気センサにおいて前記ワイヤ磁界が検出されたと判定する、請求項1から3の何れか一項の作業ロボット。
【請求項5】
前記制御部は、前記作業運転を中断する前の前記ロボット本体の移動方向を特定し、特定した前記移動方向の逆方向を、前記第1磁界探索処理における前記第1直進方向とする、請求項1から4の何れか一項の作業ロボット。
【請求項6】
前記制御部は、前記第1磁界探索処理の後、前記移動部によって前記ロボット本体を前記第1直進方向とは逆向きの第2直進方向に向けて第2距離だけ直進させるとともに、前記磁気センサにおいて前記ワイヤ磁界が検出されたか否かを判定する第2磁界探索処理をさらに実行可能に構成される、請求項1から5の何れか一項の作業ロボット。
【請求項7】
前記制御部は、前記第1磁界探索処理において前記ワイヤ磁界が検出される場合、前記第2磁界探索処理を実行せず、前記第1磁界探索処理において前記ワイヤ磁界が検出されない場合、前記第2磁界探索処理を実行する、請求項6の作業ロボット。
【請求項8】
前記第2距離は、前記第1距離と同じ距離である、請求項6または7の作業ロボット。
【請求項9】
前記第2距離は、前記第1距離よりも短い距離である、請求項6または7の作業ロボット。
【請求項10】
前記第1距離は、1000mm以下の距離である、請求項1から9の何れか一項の作業ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、作業ロボットに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
特許文献1には、ワイヤが設置された作業場において使用され、前記ワイヤの周囲に発生するワイヤ磁界に基づいて移動しながら作業を行う作業ロボットが開示される。前記作業ロボットは、ロボット本体と、前記ロボット本体を移動させる移動部と、前記ロボット本体に支持される作業部と、前記ロボット本体に支持される磁気センサと、制御部と、を備える。前記制御部は、前記移動部によって前記ロボット本体を移動させながら、前記作業部による作業を行う作業運転を実行可能に構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-207158号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば停電によってワイヤに電気信号が印加されなくなると、ワイヤ磁界が発生しなくなり、磁気センサにおいてワイヤ磁界が検出されなくなる。通常、作業運転の実行中に磁気センサでワイヤ磁界が検出されなくなると、作業運転は中断される。しかしながら、磁気センサとワイヤの間の位置関係によっては、ワイヤ磁界が発生しているにもかかわらず、磁気センサにおいてワイヤ磁界が検出されなくなることがある。この場合には、作業運転を中断させたとしても、直ちに作業運転を再開することが好ましい。ワイヤ磁界が発生しているにもかかわらず磁気センサでワイヤ磁界が検出されない状況が続くと、作業運転を一向に再開することができないので、作業ロボットによる作業が円滑に進行しないおそれがある。本明細書では、作業ロボットによる作業を円滑に進行させることが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する作業ロボットは、ワイヤが設置された作業場において使用され、前記ワイヤの周囲に発生するワイヤ磁界に基づいて移動しながら作業を行う。前記作業ロボットは、ロボット本体と、前記ロボット本体を移動させる移動部と、前記ロボット本体に支持される作業部と、前記ロボット本体に支持される磁気センサと、制御部と、を備える。前記制御部は、前記移動部によって前記ロボット本体を移動させながら、前記作業部による作業を行う作業運転を実行可能に構成される。前記制御部は、前記作業運転の実行中、所定の運転中断条件が成立する場合、前記作業運転を中断する運転中断処理と、前記運転中断処理の後、前記移動部によって前記ロボット本体を第1直進方向に向けて第1距離だけ直進させるとともに、前記磁気センサにおいて前記ワイヤ磁界が検出されたか否かを判定する第1磁界探索処理と、前記運転中断処理によって前記作業運転が中断された後に、前記磁気センサにおいて前記ワイヤ磁界が検出される場合、前記作業運転を再開する運転再開処理と、を実行可能に構成される。
【0006】
磁気センサにおいてワイヤ磁界が検出されないことが見込まれる場合であっても、磁気センサとワイヤの間の位置関係を変化させると、磁気センサにおいてワイヤ磁界が検出されることがある。上記の構成によれば、制御部は、運転中断条件が成立する場合(磁気センサにおいてワイヤ磁界が検出されないことが見込まれる場合)、磁気センサとワイヤの間の位置関係を変化させながら磁気センサによるワイヤ磁界の検出を試みることができる。これにより、ワイヤ磁界が発生しているにもかかわらず磁気センサでワイヤ磁界が検出されない状況が続くことを抑制できる。また、作業運転が中断されている間に磁気センサでワイヤ磁界が検出される場合、制御部は、作業運転を自動的に再開することができる。これにより、ユーザの助けを借りることなく作業運転を再開することができるので、作業ロボットによる作業を円滑に進行させることができる。
【図面の簡単な説明】
【0007】
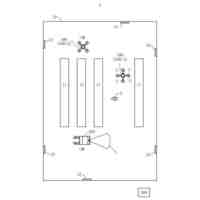
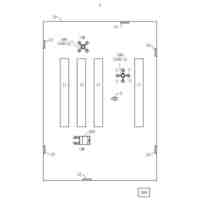
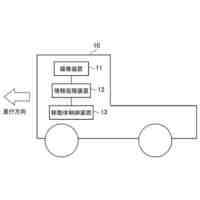
実施例に係るロボット芝刈機2の使用例を示す図である。
実施例に係るロボット芝刈機2の左側面図である。
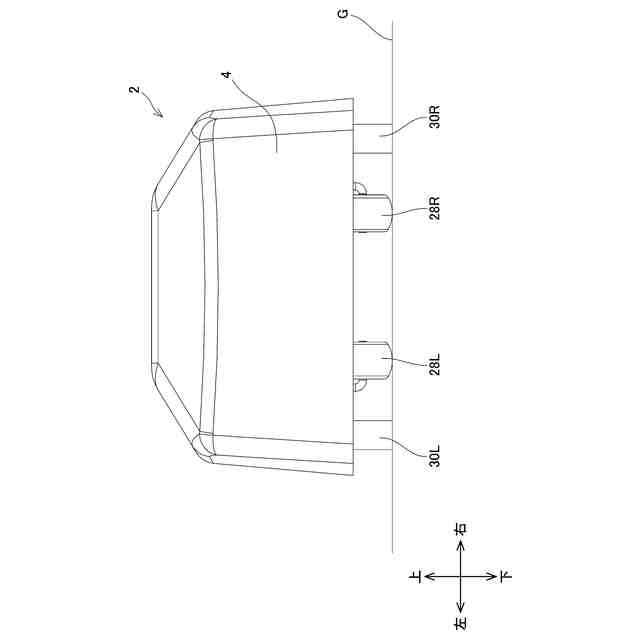
実施例に係るロボット芝刈機2の背面図である。
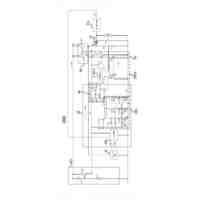
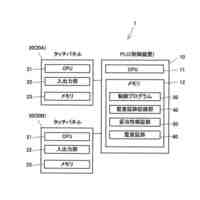
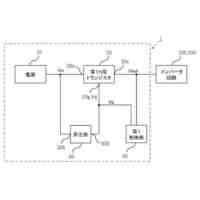
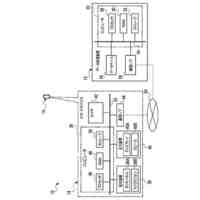
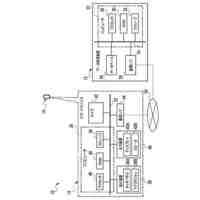
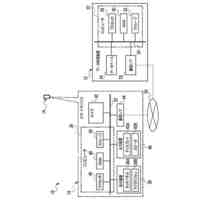
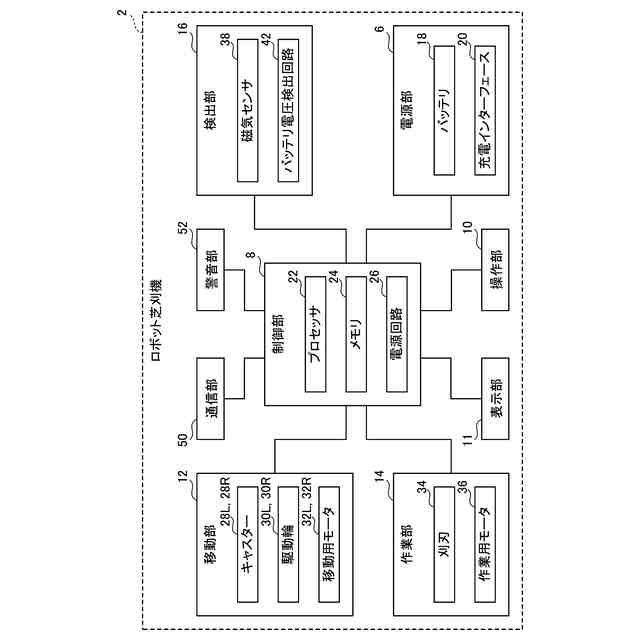
実施例に係るロボット芝刈機2の概略構成図である。
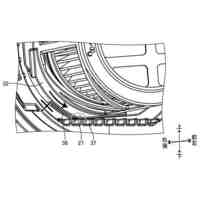
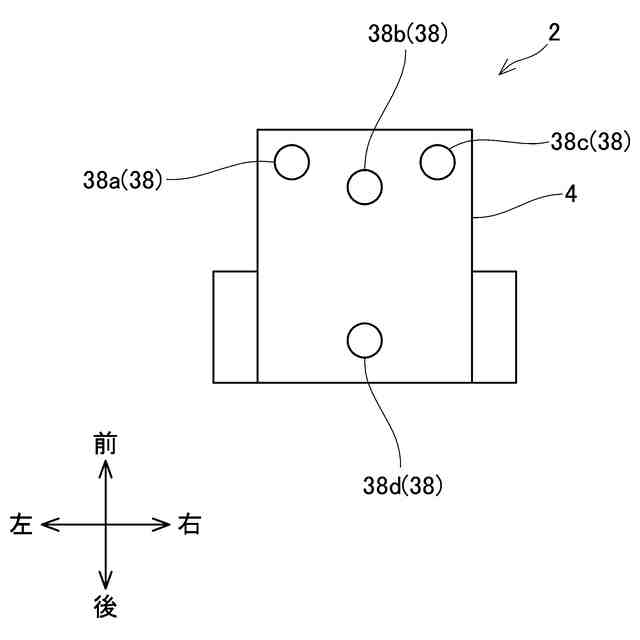
実施例に係るロボット芝刈機2の複数の磁気センサ38の配置を示す図である。
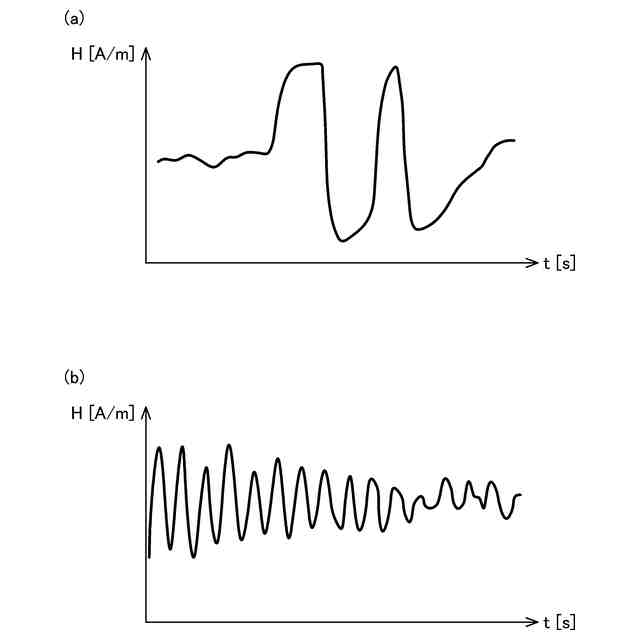
実施例に係るロボット芝刈機2の複数の磁気センサ38で観測される磁気信号の例を示す図である。
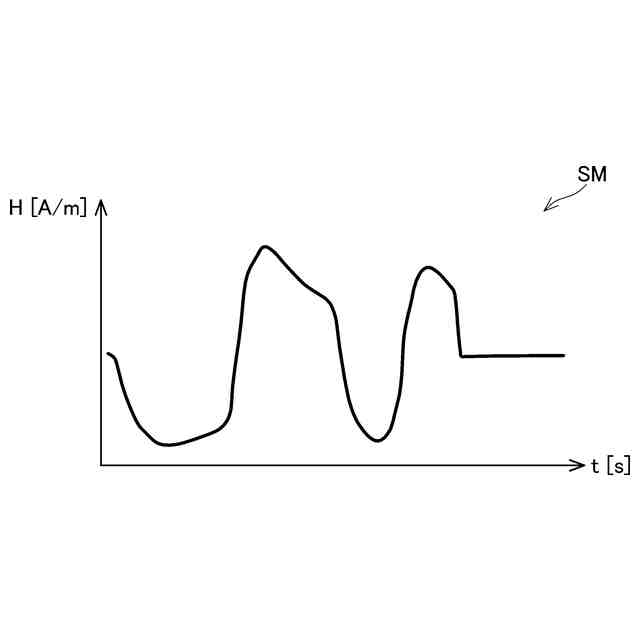
実施例に係るロボット芝刈機2のメモリ24に記憶される信号モデルSMの例を示す図である。
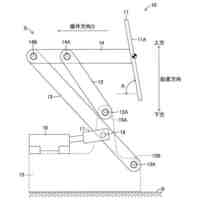
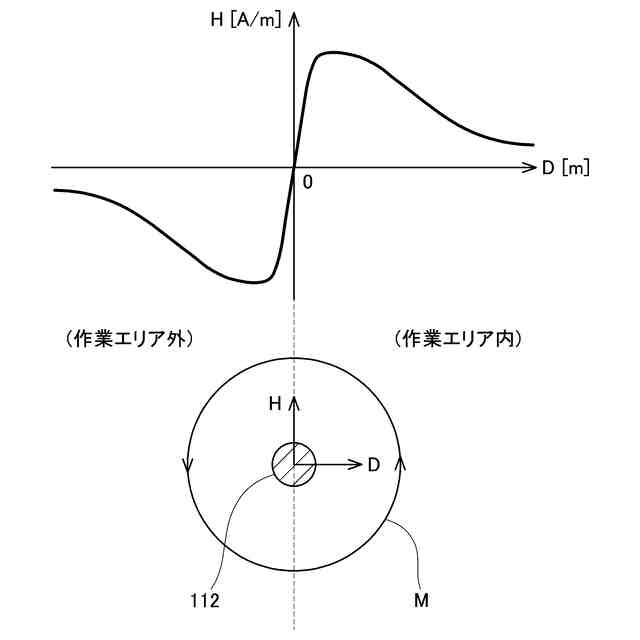
実施例に係るワイヤ112の周囲に発生するワイヤ磁界Mと、上下方向におけるワイヤ磁界Mの強さの変化を示す図である。
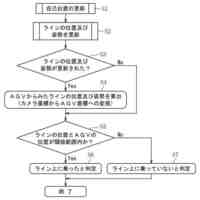
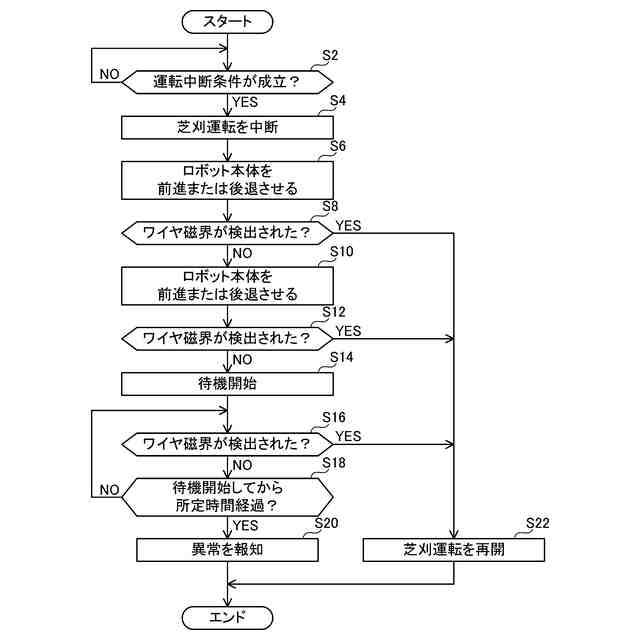
実施例に係るロボット芝刈機2の制御部8が実行する処理のフローチャートである。
実施例に係るロボット芝刈機2の複数の磁気センサ38のそれぞれがワイヤ112の直上(即ち、作業エリアWAの境界)にある状態を示す図である。
実施例に係るロボット芝刈機2が図9に示す処理に従って動作する様子を示す図である。
実施例に係るロボット芝刈機2が図9に示す処理に従って動作する様子を示す図である。
【発明を実施するための形態】
【0008】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された作業ロボットを提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、以下の代表的な具体例の様々な特徴、ならびに、特許請求の範囲に記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又は特許請求の範囲に記載された特徴の構成とは別に、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
クリーナ
12日前
エイブリック株式会社
基準電圧回路
3日前
和研工業株式会社
多連レバー機構
16日前
株式会社クボタ
作業車
6日前
ローム株式会社
半導体集積回路
11日前
株式会社ダイフク
搬送車
6日前
エイブリック株式会社
ボルテージレギュレータ
3日前
トヨタ自動車株式会社
工作機械の制御装置
5日前
トヨタ自動車株式会社
工作機械の制御装置
4日前
株式会社ダイフク
物品搬送設備
4日前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
ミツミ電機株式会社
多方向入力装置
9日前
オルガノ株式会社
運転管理方法及び運転管理装置
6日前
ローム株式会社
バイアス回路
5日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
9日前
ダイハツ工業株式会社
無人搬送車の制御方法
4日前
ローム株式会社
レギュレータ回路
10日前
岩井ファルマテック株式会社
監査証跡の管理システム
12日前
ローム株式会社
電源起動監視回路
4日前
株式会社TMEIC
リモートI/Oステーション
17日前
新電元工業株式会社
レギュレータ回路及びインバータ回路
9日前
三菱ロジスネクスト株式会社
防衛システム
10日前
ソフトバンクグループ株式会社
システム
10日前
三菱ロジスネクスト株式会社
防衛システム
10日前
トヨタ自動車株式会社
車両用ペダル装置
10日前
ソフトバンクグループ株式会社
システム
10日前
ソフトバンクグループ株式会社
システム
10日前
ソフトバンクグループ株式会社
システム
6日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
4日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ