TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025053091
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023162073
出願日
2023-09-26
発明の名称
システム
出願人
ソフトバンクグループ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05B
19/418 20060101AFI20250331BHJP(制御;調整)
要約
【課題】生成AIを活用して製品を作るためのシステムにおいて、課題は、利用者が効率的かつ正確に製品を設計・生産する手段を提供することである。
【解決手段】生成AIを活用して製品を作るためのシステムであって、接続可能なロボットアームや、その他のIoT工作機械等を備えた無人工場を提供し、利用者が生成AIを操作して製品の設計や生産を行う手段と、生成AIが製品の設計や生産に必要な情報を収集し、適切な指示を与える手段と、生成AIが製品の生産プロセスを最適化する手段とを含むシステム。
【選択図】図1
特許請求の範囲
【請求項1】
生成AIを活用して製品を作るためのシステムであって、接続可能なロボットアームや、その他のIoT工作機械等を備えた無人工場を提供し、利用者が生成AIを操作して製品の設計や生産を行う手段と、生成AIが製品の設計や生産に必要な情報を収集し、適切な指示を与える手段と、生成AIが製品の生産プロセスを最適化する手段とを含むシステム。
続きを表示(約 210 文字)
【請求項2】
請求項1に記載のシステムにおいて、生成AIが製品の設計や生産に必要な情報を収集するために、インターネット上から利用者の要求やデータを受け取る手段を備えることを特徴とするシステム。
【請求項3】
請求項1に記載のシステムにおいて、生成AIが製品の生産プロセスを最適化するために、過去の製品データや生産データを分析し、改善点や効率化の提案を行う手段を備えることを特徴とするシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示の技術は、システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、少なくとも一つのプロセッサにより遂行される、ペルソナチャットボット制御方法であって、ユーザ発話を受信するステップと、前記ユーザ発話を、チャットボットのキャラクターに関する説明と関連した指示文を含むプロンプトに追加するステップと前記プロンプトをエンコードするステップと、前記エンコードしたプロンプトを言語モデルに入力して、前記ユーザ発話に応答するチャットボット発話を生成するステップ、を含む、方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-180282号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
生成AIを活用して製品を作るためのシステムにおいて、課題は、利用者が効率的かつ正確に製品を設計・生産する手段を提供することである。
【課題を解決するための手段】
【0005】
生成AIを活用して製品を作るためのシステムであって、接続可能なロボットアームや、その他のIoT工作機械等を備えた無人工場を提供し、利用者が生成AIを操作して製品の設計や生産を行う手段と、生成AIが製品の設計や生産に必要な情報を収集し、適切な指示を与える手段と、生成AIが製品の生産プロセスを最適化する手段とを含むシステム。
【図面の簡単な説明】
【0006】
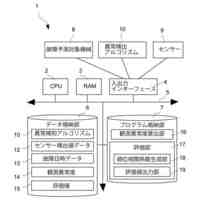
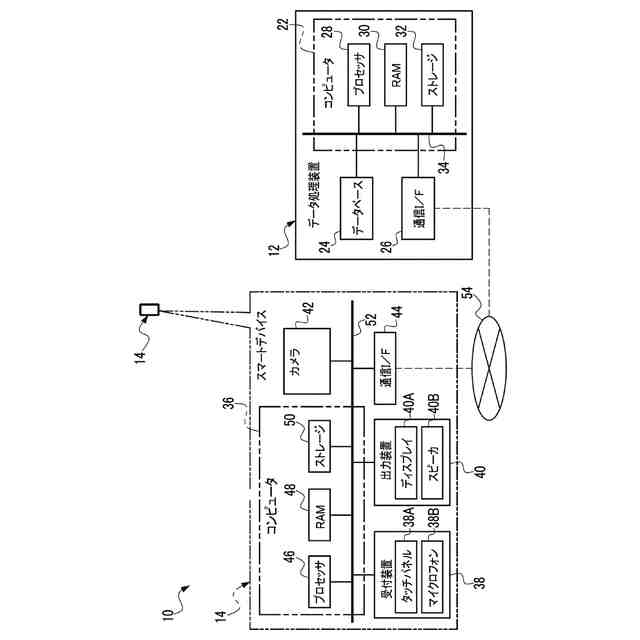
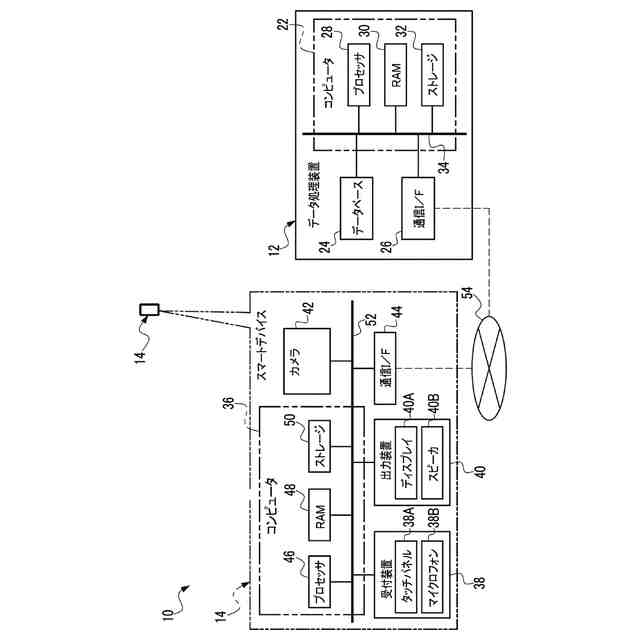
第1実施形態に係るデータ処理システムの構成の一例を示す概念図である。
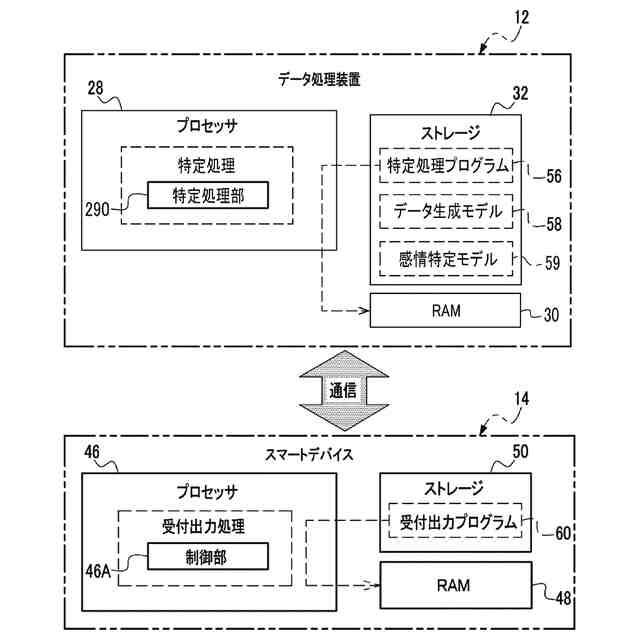
第1実施形態に係るデータ処理装置及びスマートデバイスの要部機能の一例を示す概念図である。
第2実施形態に係るデータ処理システムの構成の一例を示す概念図である。
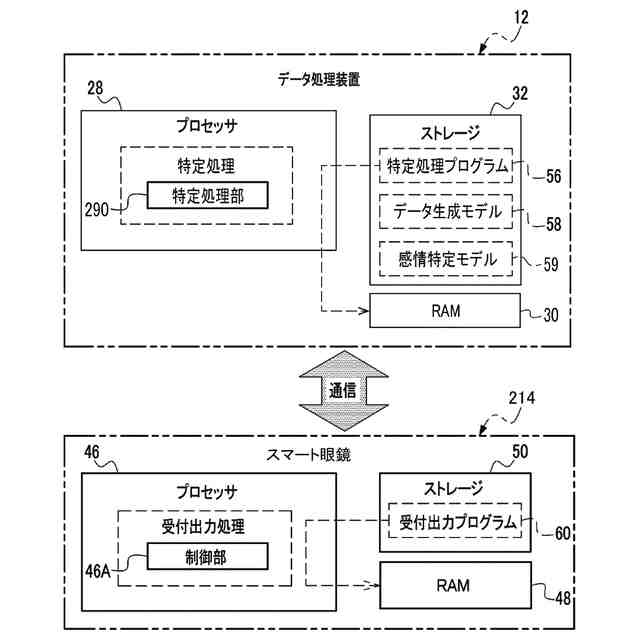
第2実施形態に係るデータ処理装置及びスマート眼鏡の要部機能の一例を示す概念図である。
第3実施形態に係るデータ処理システムの構成の一例を示す概念図である。
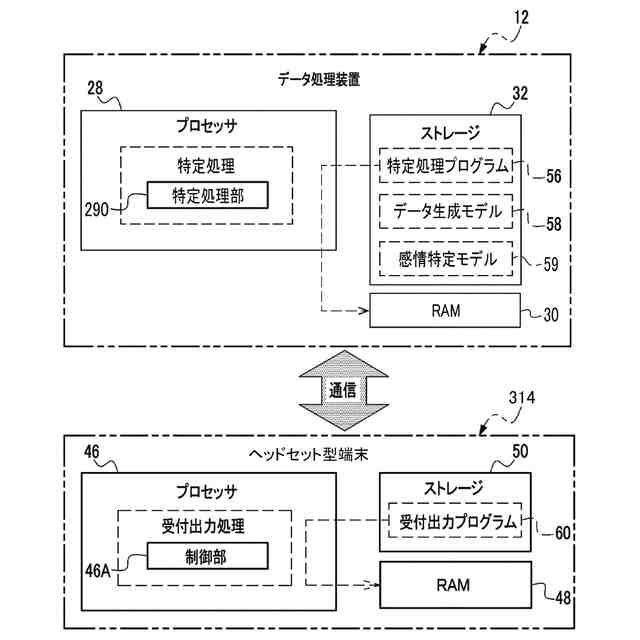
第3実施形態に係るデータ処理装置及びヘッドセット型端末の要部機能の一例を示す概念図である。
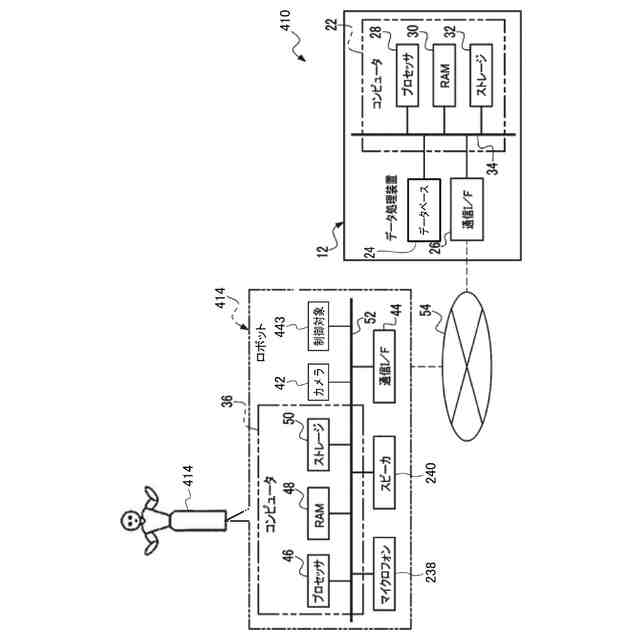
第4実施形態に係るデータ処理システムの構成の一例を示す概念図である。
第4実施形態に係るデータ処理装置及びロボットの要部機能の一例を示す概念図である。
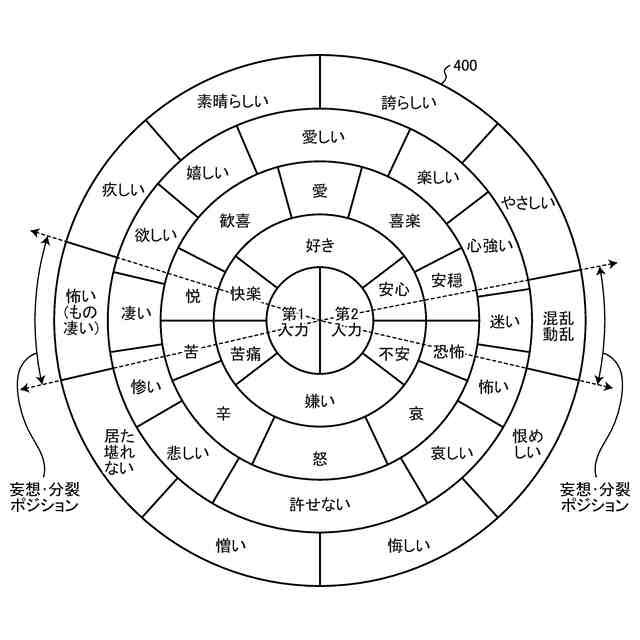
複数の感情がマッピングされる感情マップを示す。
複数の感情がマッピングされる感情マップを示す。
【発明を実施するための形態】
【0007】
以下、添付図面に従って本開示の技術に係るシステムの実施形態の一例について説明する。
【0008】
先ず、以下の説明で使用される文言について説明する。
【0009】
以下の実施形態において、符号付きのプロセッサ(以下、単に「プロセッサ」と称する)は、1つの演算装置であってもよいし、複数の演算装置の組み合わせであってもよい。また、プロセッサは、1種類の演算装置であってもよいし、複数種類の演算装置の組み合わせであってもよい。演算装置の一例としては、CPU(Central Processing Unit)、GPU(Graphics Processing Unit)、GPGPU(General-Purpose computing on Graphics Processing Units)、APU(Accelerated Processing Unit)、又はTPU(Tensor Processing Unit)等が挙げられる。
【0010】
以下の実施形態において、符号付きのRAM(Random Access Memory)は、一時的に情報が格納されるメモリであり、プロセッサによってワークメモリとして用いられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
今日
和研工業株式会社
多連レバー機構
13日前
株式会社クボタ
作業車
3日前
株式会社ダイフク
搬送車
3日前
ローム株式会社
半導体集積回路
8日前
エイブリック株式会社
ボルテージレギュレータ
今日
トヨタ自動車株式会社
工作機械の制御装置
1日前
トヨタ自動車株式会社
工作機械の制御装置
2日前
愛知機械テクノシステム株式会社
無人搬送車
22日前
株式会社ダイフク
物品搬送設備
1日前
アズビル株式会社
制御システムおよび制御方法
23日前
アズビル株式会社
制御システムおよび制御方法
14日前
アズビル株式会社
制御システムおよび制御方法
14日前
日本精工株式会社
制御装置および制御方法
20日前
チームラボ株式会社
走行システム及び走行路
27日前
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
今日
トヨタ自動車株式会社
群制御システム及び群制御方法
22日前
村田機械株式会社
稼働監視システム及び稼働監視方法
23日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
オルガノ株式会社
運転管理方法及び運転管理装置
3日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
6日前
ローム株式会社
バイアス回路
2日前
ミツミ電機株式会社
多方向入力装置
20日前
ミツミ電機株式会社
多方向入力装置
6日前
ミツミ電機株式会社
多方向入力装置
20日前
ミツミ電機株式会社
多方向入力装置
20日前
ミツミ電機株式会社
多方向入力装置
20日前
ミツミ電機株式会社
多方向入力装置
20日前
ダイハツ工業株式会社
無人搬送車の制御方法
1日前
HEROZ株式会社
異常検知アルゴリズムの評価システム
22日前
岩井ファルマテック株式会社
監査証跡の管理システム
9日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ