TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025057148
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023166832
出願日
2023-09-28
発明の名称
情報処理装置、方法、及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250402BHJP(制御;調整)
要約
【課題】自律移動体の進入禁止領域の設定について改善することを目的とする。
【解決手段】情報処理装置は、移動体が移動する環境を撮像した画像を取得する手段と、前記取得した画像を意味的領域分割モデルに入力し、前記意味的領域分割モデルの出力として、前記移動体の進入禁止領域、進入許可領域、進入禁止領域か進入許可領域か確定させない領域の少なくとも3つのカテゴリーを前記取得した画像において取得する手段と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体が移動する環境を撮像した画像を取得する手段と、
前記取得した画像を意味的領域分割モデルに入力し、前記意味的領域分割モデルの出力として、前記移動体の進入禁止領域、進入許可領域、進入禁止領域か進入許可領域か確定させない領域の少なくとも3つのカテゴリーを前記取得した画像において取得する手段と、
を有することを特徴とする情報処理装置。
続きを表示(約 710 文字)
【請求項2】
前記進入禁止領域か進入許可領域か確定させない領域を、進入禁止領域とするか、又は進入許可領域とするかの設定を行う手段を有することを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記意味的領域分割モデルは、進入禁止領域、進入許可領域、進入禁止領域か進入許可領域か確定させない領域、及び垂れ壁領域の少なくとも4つのカテゴリーに分割して出力する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記垂れ壁領域に仕切られた領域を、進入禁止領域とするか、又は進入許可領域とするかの設定を行う手段を有することを特徴とする請求項3に記載の情報処理装置。
【請求項5】
移動体が移動する環境を撮像した画像を取得する工程と、
前記取得した画像を意味的領域分割モデルに入力し、前記意味的領域分割モデルの出力として、前記移動体の進入禁止領域、進入許可領域、進入禁止領域か進入許可領域か確定させない領域の少なくとも3つのカテゴリーを前記取得した画像において取得する工程と、
を有することを特徴とする方法。
【請求項6】
コンピュータを、
移動体が移動する環境を撮像した画像を取得する手段、及び
前記取得した画像を意味的領域分割モデルに入力し、前記意味的領域分割モデルの出力として、前記移動体の進入禁止領域、進入許可領域、進入禁止領域か進入許可領域か確定させない領域の少なくとも3つのカテゴリーを前記取得した画像において取得する手段、
として機能させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、方法、及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
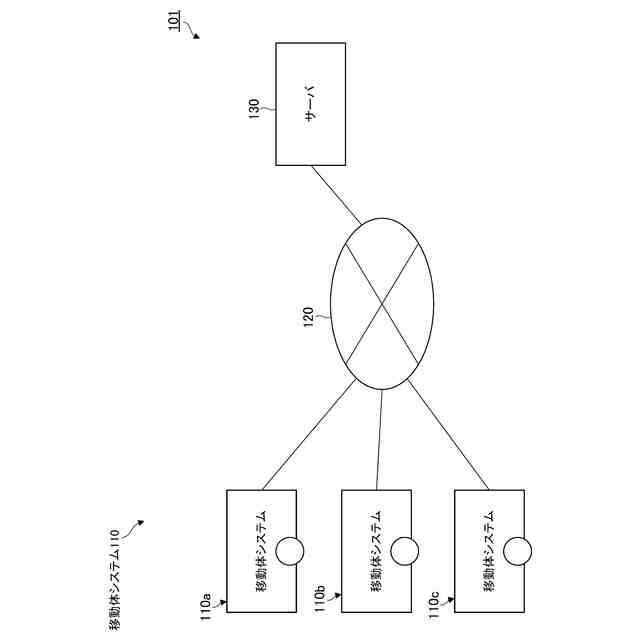
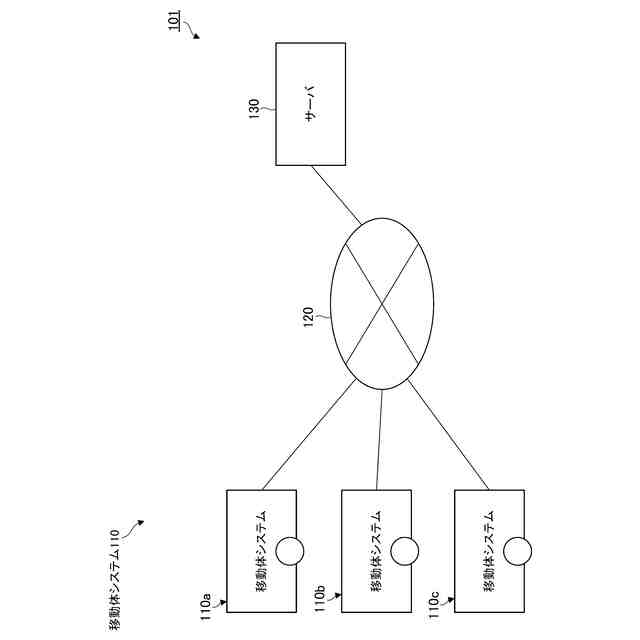
従来、自律的に走行するサービスロボットなどの自律移動体が知られている。このような自律移動体においては移動可能な領域が定められる。一般に、商業施設等で清掃作業を行う清掃ロボットや巡回警備を行う警備ロボットなどの場合、施設の管理会社が管理する領域は施設の共用領域に限定され、テナントの占有する領域の管理までは行わない場合がある。このような場合、施設の管理会社が清掃ロボットを用いて清掃作業を行う場合に清掃ロボットが走行する領域は施設の共用領域のみであり、警備ロボットの巡回する範囲もまた共用領域のみである。
【0003】
このように、自律移動体である清掃ロボットや警備ロボットは、進入許可領域と進入禁止領域とを識別して走行する必要がある。
【0004】
自律移動体に進入禁止領域を設定するため、自律移動体を手動で走行させ、その移動軌跡によって進入禁止領域を設定することが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
特開2022-86464号公報
【非特許文献】
【0006】
F.Dellaert,D.Fox,W.Burgard,S.Thrun, Monte Carlo localization for mobile robotS, Proc.of IEEE International Conference on RoboticS and Automation,1999
Dieter Fox, Adapting the Sample Size in particle filterS through KLD-Sampling, International Journal of RoboticS ReSearch,2003
Giorgio GriSetti,Cyrill StachniSS,Wolfram Burgard, Improved techniqueS for grid mapping with rao-blackwellized particle filterS, IEEE tranSactionS on RoboticS,2007
Liang-Chieh Chen,Yukun Zhu,George Papandreou,Florian Schroff,and Hartwig Adam, Encoder-Decoder with AtrouS Separable Convolution for Semantic Image Segmentation, European Conference on Computer ViSion,2018
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、自律移動体の移動軌跡で進入禁止領域を設定するのでは、進入禁止領域が広い場合や形状が複雑な場合などで、設定作業が煩雑であり、設定漏れの可能性も高まるという問題があった。こうなると、自律移動体に所望の走行をさせられない。このように、従来、自律移動体の進入禁止領域の設定について改善の余地があった。
【0008】
本発明は、上記の課題にかんがみて、自律移動体の進入禁止領域の設定について改善することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一実施形態の情報処理装置は、移動体が移動する環境を撮像した画像を取得する手段と、前記取得した画像を意味的領域分割モデルに入力し、前記意味的領域分割モデルの出力として、前記移動体の進入禁止領域、進入許可領域、進入禁止領域か進入許可領域か確定させない領域の少なくとも3つのカテゴリーを前記取得した画像において取得する手段と、を有する。
【発明の効果】
【0010】
本発明によれば、自律移動体の進入禁止領域の設定について改善することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
3日前
和研工業株式会社
多連レバー機構
16日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
6日前
ローム株式会社
半導体集積回路
11日前
株式会社ダイフク
搬送車
6日前
エイブリック株式会社
ボルテージレギュレータ
3日前
トヨタ自動車株式会社
工作機械の制御装置
4日前
トヨタ自動車株式会社
工作機械の制御装置
5日前
株式会社ダイフク
物品搬送設備
4日前
愛知機械テクノシステム株式会社
無人搬送車
25日前
アズビル株式会社
制御システムおよび制御方法
17日前
アズビル株式会社
制御システムおよび制御方法
17日前
アズビル株式会社
制御システムおよび制御方法
26日前
日本精工株式会社
制御装置および制御方法
23日前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
3日前
チームラボ株式会社
走行システム及び走行路
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
25日前
村田機械株式会社
稼働監視システム及び稼働監視方法
26日前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
半導体装置
1か月前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
9日前
ミツミ電機株式会社
多方向入力装置
23日前
ミツミ電機株式会社
多方向入力装置
23日前
ローム株式会社
バイアス回路
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































