TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025059240
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169201
出願日
2023-09-29
発明の名称
情報処理装置、方法、及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250403BHJP(制御;調整)
要約
【課題】映り込みがある環境でも自律移動体がロバストな走行ができるようにすることである。
【解決手段】情報処理装置は、撮像装置によって撮影した画像情報を取得する画像入力手段と、前記取得した画像から特徴点情報を検出する検出手段と、前記検出した特徴点情報が映り込みによる特徴点情報であるか否かを判断する判断手段と、前記判断手段が、前記検出した特徴点情報が映り込みによる特徴点情報であると判断した場合、前記検出した特徴点情報から前記映り込みによる特徴点情報の影響を下げた特徴点情報を制御特徴点情報とする制御手段と、前記制御特徴点情報を用いて前記撮像装置の位置姿勢を推定する位置姿勢推定手段と、前記推定した前記撮像装置の位置姿勢に基づいて前記撮像装置が配置された移動体の移動を制御する移動制御手段と、を有する。
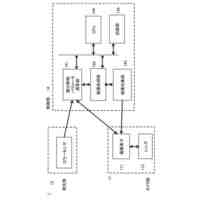
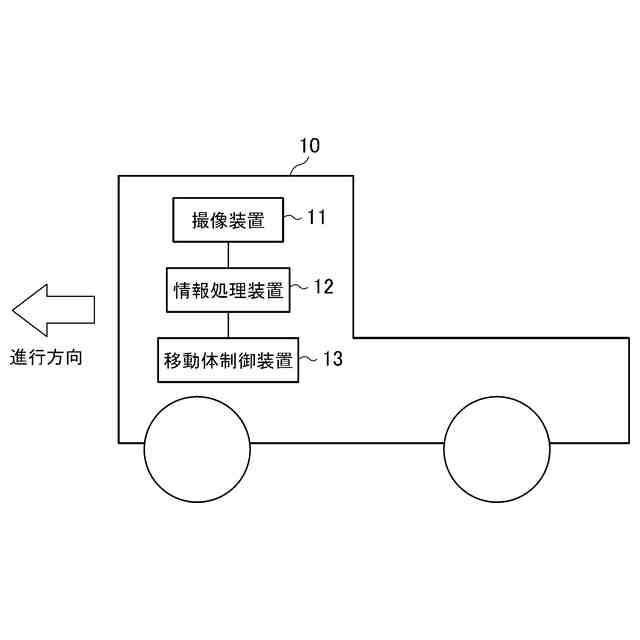
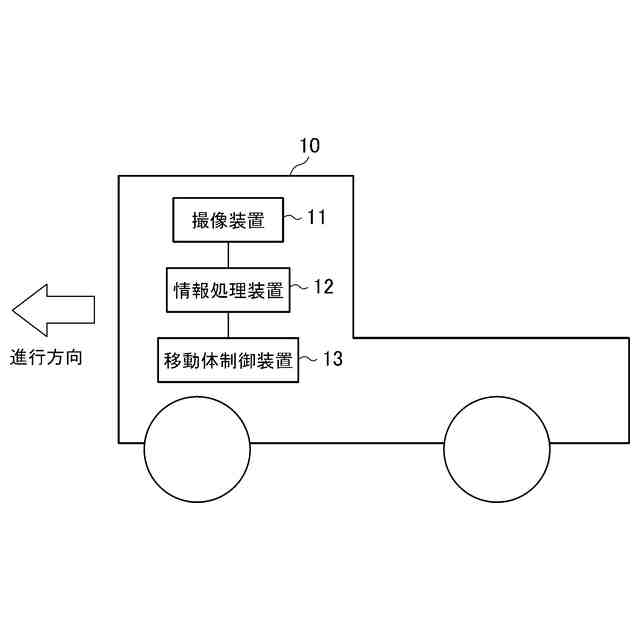
【選択図】図1
特許請求の範囲
【請求項1】
撮像装置によって撮影した画像情報を取得する画像入力手段と、
前記取得した画像から特徴点情報を検出する検出手段と、
前記検出した特徴点情報が映り込みによる特徴点情報であるか否かを判断する判断手段と、
前記判断手段が、前記検出した特徴点情報が映り込みによる特徴点情報であると判断した場合、前記検出した特徴点情報から前記映り込みによる特徴点情報の影響を下げた特徴点情報を制御特徴点情報とする制御手段と、
前記制御特徴点情報を用いて前記撮像装置の位置姿勢を推定する位置姿勢推定手段と、
前記推定した前記撮像装置の位置姿勢に基づいて前記撮像装置が配置された移動体の移動を制御する移動制御手段と、
を有することを特徴とする情報処理装置。
続きを表示(約 1,100 文字)
【請求項2】
前記特徴点情報は、特徴点の画像上の位置と、特徴点の三次元位置を含む、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記判断手段は、前記特徴点情報と過去の特徴点情報をマッチングし、画角に映り続けている特徴点のうち、移動量が閾値におさまる特徴点を、映り込みによる特徴点情報であると判断する、
ことを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記制御手段は、前記特徴点情報のうち、移動量が閾値におさまる特徴点をマスクした特徴点情報を作成する、
ことを特徴とする請求項3に記載の情報処理装置。
【請求項5】
前記特徴点情報は、さらに信頼度を含むことを特徴とする、
請求項3に記載の情報処理装置。
【請求項6】
前記制御手段は、前記特徴点情報のうち、移動量が閾値におさまる特徴の信頼度を下げた特徴点情報を作成する、
ことを特徴とする請求項5に記載の情報処理装置。
【請求項7】
撮像装置によって撮影した画像情報を取得する画像入力工程と、
前記取得した画像から特徴点情報を検出する検出工程と、
前記検出した特徴点情報が映り込みによる特徴点情報であるか否かを判断する判断工程と、
前記判断工程が、前記検出した特徴点情報が映り込みによる特徴点情報であると判断した場合、前記検出した特徴点情報から前記映り込みによる特徴点情報の影響を下げた特徴点情報を制御特徴点情報とする制御工程と、
前記制御特徴点情報を用いて前記撮像装置の位置姿勢を推定する位置姿勢推定工程と、
前記推定した前記撮像装置の位置姿勢に基づいて前記撮像装置が配置された移動体の移動を制御する移動制御工程と、
を有することを特徴とする方法。
【請求項8】
コンピュータを、
撮像装置によって撮影した画像情報を取得する画像入力手段、
前記取得した画像から特徴点情報を検出する検出手段、
前記検出した特徴点情報が映り込みによる特徴点情報であるか否かを判断する判断手段、
前記判断手段が、前記検出した特徴点情報が映り込みによる特徴点情報であると判断した場合、前記検出した特徴点情報から前記映り込みによる特徴点情報の影響を下げた特徴点情報を制御特徴点情報とする制御手段、
前記制御特徴点情報を用いて前記撮像装置の位置姿勢を推定する位置姿勢推定手段、及び
前記推定した前記撮像装置の位置姿勢に基づいて前記撮像装置が配置された移動体の移動を制御する移動制御手段、
として機能させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、方法、及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、カメラ等のセンサを用いて自己位置や姿勢を取得し、更に周辺環境の地図データを用いて自律移動する移動体が知られている。このような自律移動体は、検出した周辺環境の特徴点を地図データとマッチングし、自律移動体の位置や姿勢を推定して自律移動している。
【0003】
ところが、自律移動する場所によっては、床面に映り込みが発生する可能性がある。特許文献1では、入力画像中からヘッドライトによる路面反射の領域を検出し、その領域を除外して処理を行うことにより、ヘッドライトによる路面反射が1つになり広がってしまった場合でも、正確に車両を検出する方法を開示している。
【先行技術文献】
【特許文献】
【0004】
特開2007-265016号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
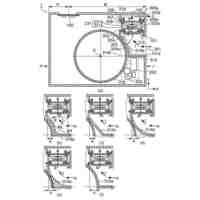
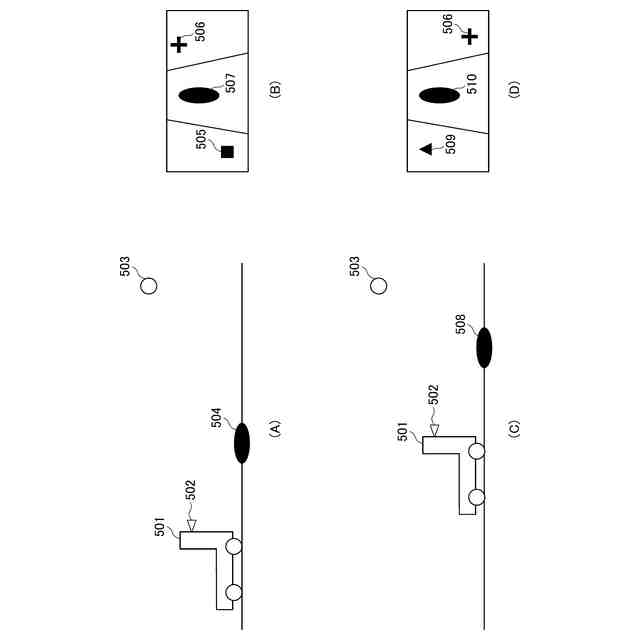
ここで、映り込みについて説明する。映り込みがある場合、移動体が誤ってその映り込みにおいて特徴点を検出してしまうことがある。例えば床面に映り込みがある場合について図6(A)、図6(B)、図6(C)及び図6(D)を参照して説明する。
【0006】
図6(A)は、移動体501が走行する様子を示す図である。移動体501は、撮像装置502を有する。移動体501は、撮像装置502で撮像しつつ床面に模様のない通路を走行している。照明503は、天井に配置されている。映り込み504は、照明503が床面で反射して、撮像装置502による撮像画像に映り込んだものである。なお、図6(A)、図6(B)、図6(C)及び図6(D)において、壁の図示は省略している。
【0007】
図6(B)は、図6(A)の状況において撮像装置502が撮像した画像から検出した特徴点の例を示す。特徴点505は、移動体501の左側の壁にある特徴点である。特徴点506は、移動体501の右側の壁にある特徴点である。また特徴点507は、図6(A)の床面の映り込み504による特徴点である。
【0008】
図6(C)は、移動体501が図6(A)における床面の映り込み504の位置まで前進した際の様子を示す図である。映り込み508は、照明503が床面で反射して、撮像装置502による撮像画像に映り込んだものである。映り込み508は、移動体501が図6(A)における床面の映り込み504の位置まで前進した際の床面の映り込みである。なお、図6(A)と同一の部材又は要素については同一の符号を付し説明を省略する。
【0009】
図6(D)は、図6(C)の状況において撮像装置502が撮像した画像から検出した特徴点の例を示す。特徴点509は、移動体501の左側の壁にある特徴点である。特徴点506は、移動体501の右側の壁にある特徴点である。移動体501が前進したため、特徴点506は、図6(B)の場合よりも移動体特徴点に近い位置にある。また特徴点510は、図6(C)の床面の映り込み508による特徴点である。
【0010】
床面には模様がないため、本来、特徴点が検出されないはずであるが、図6(B)及び図6(D)を参照してわかるように、映り込みによる特徴点を検出している。この映り込みによる特徴点の検出は、誤検出である。また映り込みによる特徴点は、移動体が前進しても移動体の前方向に存在し続ける。このような場合、誤検出により自己位置推定に影響が出る可能性がある。例えば、誤検出部分を障害物だと捉えて自律走行で所望の動作をしない、といった問題が発生する可能性がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
5日前
キヤノン株式会社
トナー
19日前
キヤノン株式会社
トナー
19日前
キヤノン株式会社
トナー
14日前
キヤノン株式会社
トナー
19日前
キヤノン株式会社
トナー
19日前
キヤノン株式会社
トナー
14日前
キヤノン株式会社
撮像装置
27日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
情報機器
27日前
キヤノン株式会社
記録装置
6日前
キヤノン株式会社
光学装置
20日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
電子機器
8日前
キヤノン株式会社
記録装置
20日前
キヤノン株式会社
培養装置
19日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
定着装置
19日前
キヤノン株式会社
培養装置
19日前
キヤノン株式会社
現像装置
22日前
キヤノン株式会社
撮像装置
19日前
キヤノン株式会社
培養装置
19日前
キヤノン株式会社
電子機器
12日前
キヤノン株式会社
撮像装置
4日前
キヤノン株式会社
撮像装置
29日前
キヤノン株式会社
撮像装置
28日前
キヤノン株式会社
現像装置
22日前
キヤノン株式会社
光学機器
28日前
キヤノン株式会社
プログラム
14日前
キヤノン株式会社
プログラム
14日前
キヤノン株式会社
プログラム
14日前
キヤノン株式会社
画像形成装置
26日前
キヤノン株式会社
光電変換装置
4日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ