TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035368
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142362
出願日
2023-09-01
発明の名称
自律移動システム
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
G05D
1/43 20240101AFI20250306BHJP(制御;調整)
要約
【課題】簡素な充電ステーションの構成により、ステーションワイヤを検出することができる技術を提供する。
【解決手段】自律移動システムは、作業エリア内を自律移動しながら作業する作業ロボットと、作業ロボットを充電する充電ステーションと、作業エリアを画定しており、通電時に磁界が発生する境界ワイヤと、充電ステーションに配置されており、境界ワイヤと電気的に接続されているとともに、通電時に磁界が発生するステーションワイヤと、を備えている。作業ロボットは、境界ワイヤから発生する磁界とステーションワイヤから発生する磁界を検出する磁気検出部と、磁気検出部での検出結果に基づいてステーションワイヤを検出する制御部と、を備えている。充電ステーションは、作業ロボットに電気的に接続される充電端子と、境界ワイヤとステーションワイヤに同一の電気信号を印加する信号発生器と、を備えている。
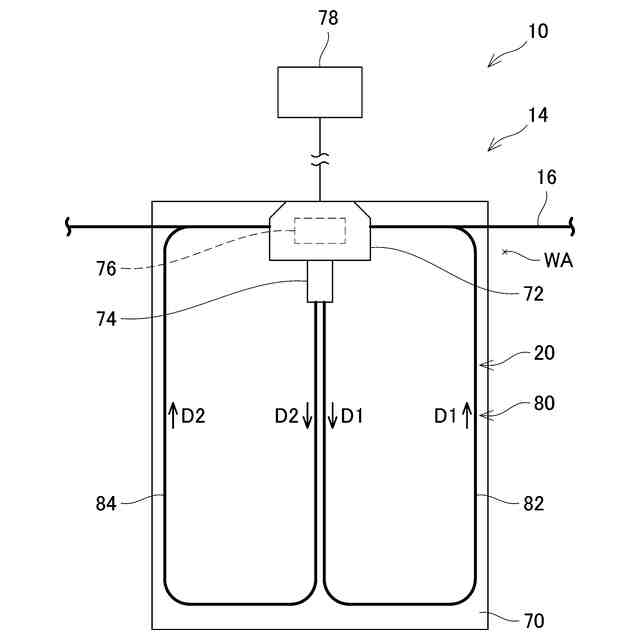
【選択図】図6
特許請求の範囲
【請求項1】
自律移動システムであって、
作業エリア内を自律移動しながら作業する作業ロボットと、
前記作業ロボットを充電する充電ステーションと、
前記作業エリアを画定しており、通電時に磁界が発生する境界ワイヤと、
前記充電ステーションに配置されており、前記境界ワイヤと電気的に接続されているとともに、通電時に磁界が発生するステーションワイヤと、を備えており、
前記作業ロボットは、
作業を行う作業部と、
前記作業部を動作させる作業用モータと、
前記作業ロボットを移動させる移動部と、
前記移動部を動作させる移動用モータと、
前記充電ステーションで充電され、前記作業用モータと前記移動用モータに電力を供給するバッテリと、
前記境界ワイヤから発生する前記磁界と前記ステーションワイヤから発生する前記磁界を検出する磁気検出部と、
前記作業用モータと前記移動用モータを制御し、前記磁気検出部での検出結果に基づいて前記ステーションワイヤを検出する制御部と、を備えており、
前記充電ステーションは、
前記作業ロボットに電気的に接続される充電端子と、
前記境界ワイヤと前記ステーションワイヤに同一の電気信号を印加する信号発生器と、を備えている、自律移動システム。
続きを表示(約 1,200 文字)
【請求項2】
前記ステーションワイヤは、前記ステーションワイヤと前記境界ワイヤの通電時に、前記境界ワイヤに発生する前記磁界の強度よりも高い強度の前記磁界を発生させる磁界強化構造を備えている、請求項1に記載の自律移動システム。
【請求項3】
前記制御部は、少なくとも通電時に前記ステーションワイヤに発生する前記磁界の強度に基づいて前記ステーションワイヤを検出する、請求項1または2に記載の自律移動システム。
【請求項4】
前記ステーションワイヤは、前記境界ワイヤと電気的に直列に接続されている、請求項1から3のいずれか一項に記載の自律移動システム。
【請求項5】
前記制御部は、
前記作業ロボットが前記充電ステーションに位置するときに前記ステーションワイヤの前記磁界の強度を記憶し、
記憶した前記磁界の前記強度と、前記磁気検出部により検出される前記ステーションワイヤの前記磁界の前記強度と、に基づいて、前記ステーションワイヤを検出する、請求項1から4のいずれか一項に記載の自律移動システム。
【請求項6】
前記制御部は、前記充電端子に電気的に接続される前記作業ロボットを前記充電ステーションから離脱させる離脱処理を実行し、
前記制御部は、前記離脱処理を実行しているとき、前記作業ロボットが前記充電端子から外れた後に、前記ステーションワイヤの前記磁界の前記強度を取得する、請求項5に記載の自律移動システム。
【請求項7】
前記離脱処理は、前記作業ロボットが前記充電端子から外れた後に前記作業ロボットを旋回させる旋回処理を備えており、
前記制御部は、前記旋回処理の間に、前記ステーションワイヤの前記磁界の前記強度を取得する、請求項6に記載の自律移動システム。
【請求項8】
前記磁気検出部は、前記境界ワイヤから発生する前記磁界と前記ステーションワイヤから発生する前記磁界を検出する複数の磁気センサを備えており、
前記制御部は、前記旋回処理の間に、前記複数の磁気センサのそれぞれにより検出される前記ステーションワイヤの前記磁界の強度を取得する、請求項7に記載の自律移動システム。
【請求項9】
前記制御部は、前記ステーションワイヤの前記磁界の前記強度のピーク値を記憶する、請求項5から8のいずれか一項に記載の自律移動システム。
【請求項10】
前記制御部は、
記憶した前記ピーク値の80%以上である閾値を設定し、
設定した前記閾値と、前記磁気検出部により検出される前記ステーションワイヤの前記磁界の前記強度と、に基づいて、前記ステーションワイヤを検出する、請求項9に記載の自律移動システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、自律移動システムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特許文献1には、自律移動システムが開示されている。自律移動システムは、作業エリア内を自律移動しながら作業する作業ロボットと、作業ロボットを充電する充電ステーションと、作業エリアを画定しており、通電時に磁界が発生する境界ワイヤと、充電ステーションに配置されており、通電時に磁界が発生するステーションワイヤと、を備えている。作業ロボットは、作業を行う作業部と、作業部を動作させる作業用モータと、作業ロボットを移動させる移動部と、移動部を動作させる移動用モータと、充電ステーションで充電され、作業用モータと移動用モータに電力を供給するバッテリと、境界ワイヤから発生する磁界とステーションワイヤから発生する磁界を検出する磁気検出部と、作業用モータと移動用モータを制御し、磁気検出部での検出結果に基づいてステーションワイヤを検出する制御部と、を備えている。充電ステーションは、作業ロボットに電気的に接続される充電端子と、境界ワイヤに第1電気信号を印加する第1信号発生器と、ステーションワイヤに第2電気信号を印加する第2信号発生器と、を備えている。
【先行技術文献】
【特許文献】
【0003】
特開2017-182635号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の自律移動システムでは、ステーションワイヤを検出するために、ステーションワイヤに第2電気信号を印加する第2信号発生器が必要となる。これにより、充電ステーションの構成が複雑となる。本明細書では、簡素な充電ステーションの構成により、ステーションワイヤを検出することができる技術を提供する。
【課題を解決するための手段】
【0005】
本明細書は、自律移動システムを開示する。自律移動システムは、作業エリア内を自律移動しながら作業する作業ロボットと、作業ロボットを充電する充電ステーションと、作業エリアを画定しており、通電時に磁界が発生する境界ワイヤと、充電ステーションに配置されており、境界ワイヤと電気的に接続されているとともに、通電時に磁界が発生するステーションワイヤと、を備えている。作業ロボットは、作業を行う作業部と、作業部を動作させる作業用モータと、作業ロボットを移動させる移動部と、移動部を動作させる移動用モータと、充電ステーションで充電され、作業用モータと移動用モータに電力を供給するバッテリと、境界ワイヤから発生する磁界とステーションワイヤから発生する磁界を検出する磁気検出部と、作業用モータと移動用モータを制御し、磁気検出部での検出結果に基づいてステーションワイヤを検出する制御部と、を備えている。充電ステーションは、作業ロボットに電気的に接続される充電端子と、境界ワイヤとステーションワイヤに同一の電気信号を印加する信号発生器と、を備えている。
【0006】
上記の構成によれば、1個の信号発生器が、境界ワイヤとステーションワイヤに同一の電気信号を印加する。これにより、簡素な充電ステーションの構成により、ステーションワイヤを検出することができる。
【図面の簡単な説明】
【0007】
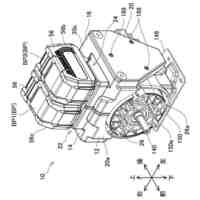
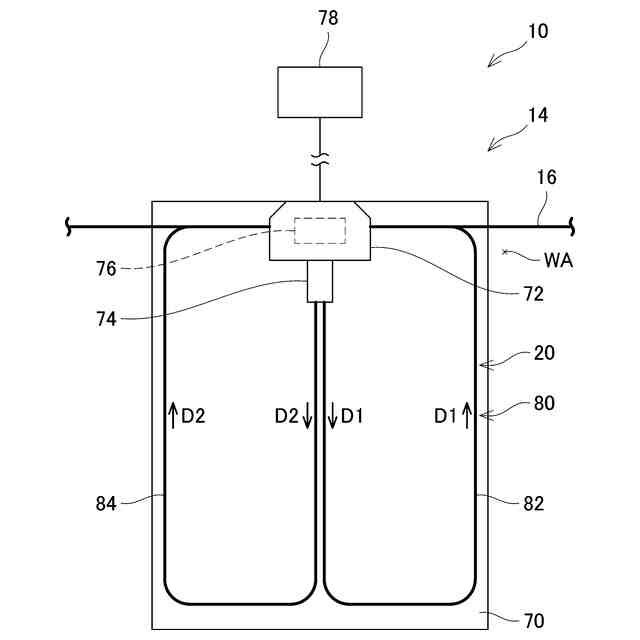
実施例の自律移動システム10の概略図である。
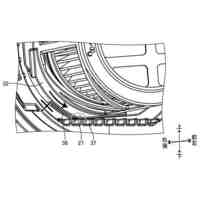
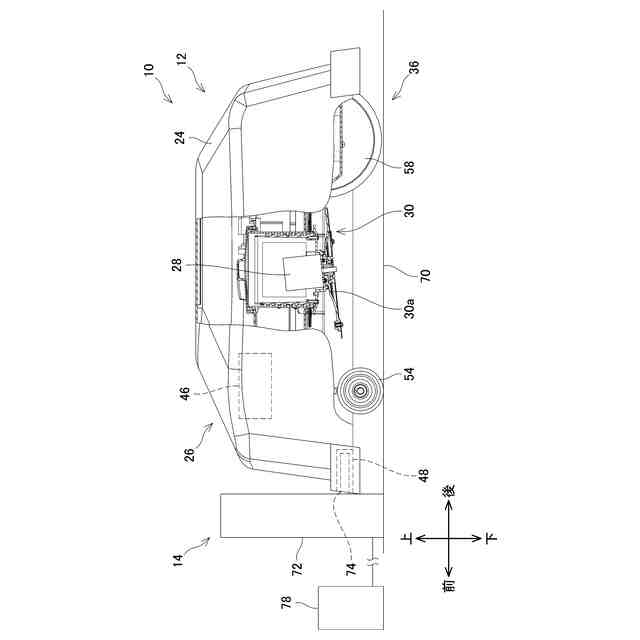
実施例の作業ロボット12と充電ステーション14の側面図である。
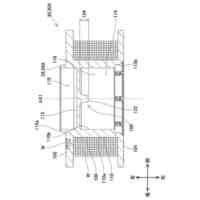
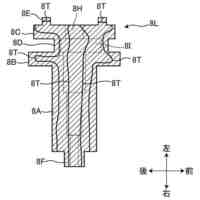
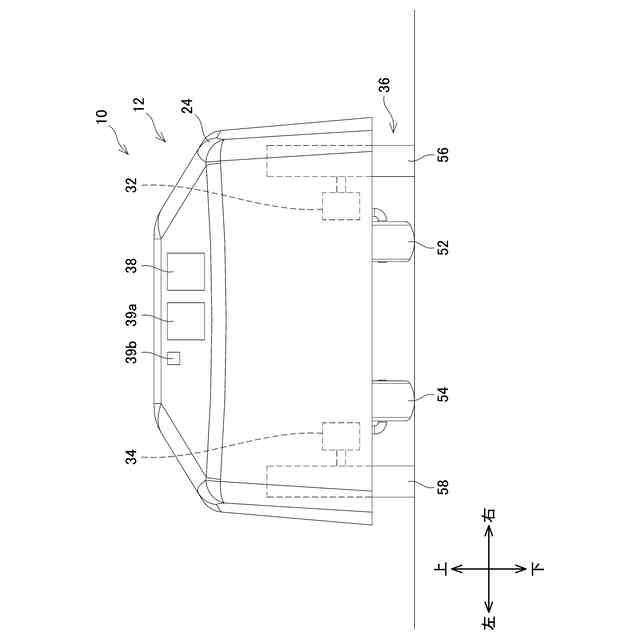
実施例の作業ロボット12の後面図である。
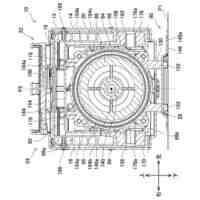
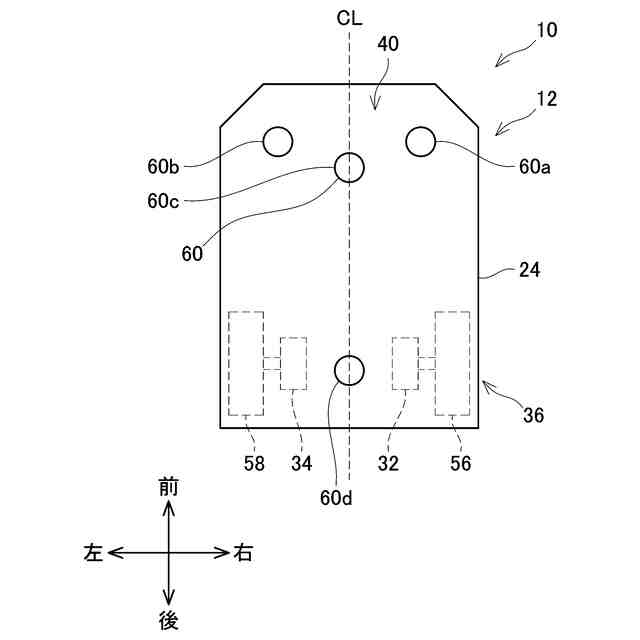
実施例の作業ロボット12の上面図である。
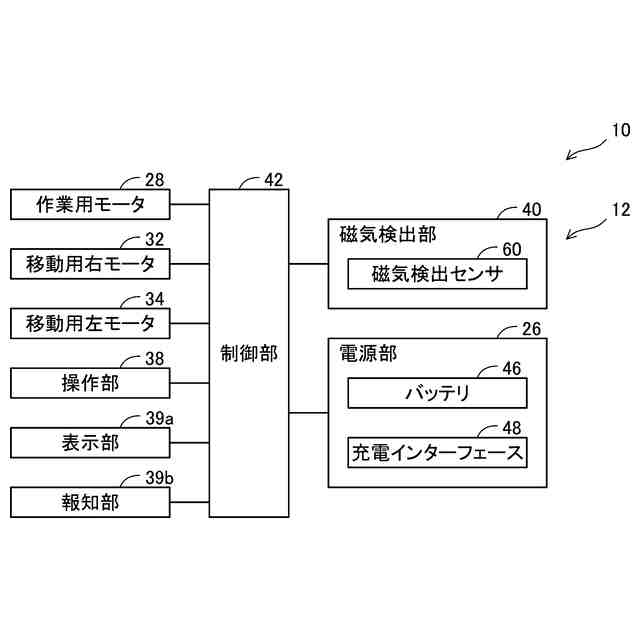
実施例の作業ロボット12の電気ブロック図である。
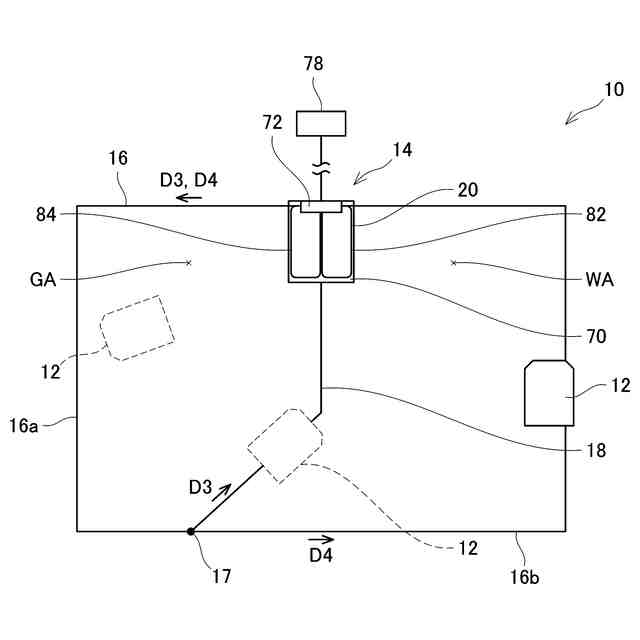
実施例の充電ステーション14近傍の自律移動システム10の概略図である。
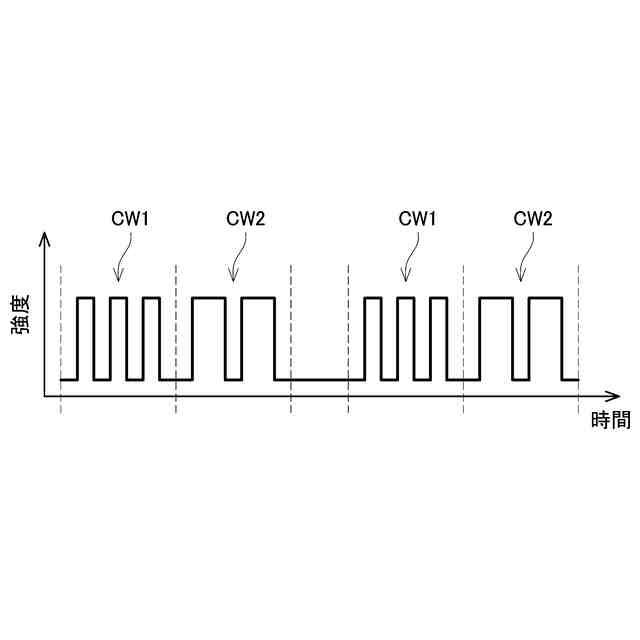
実施例の第1電気信号の電流波形CW1と第2電気信号の電流波形CW2を示す図である。
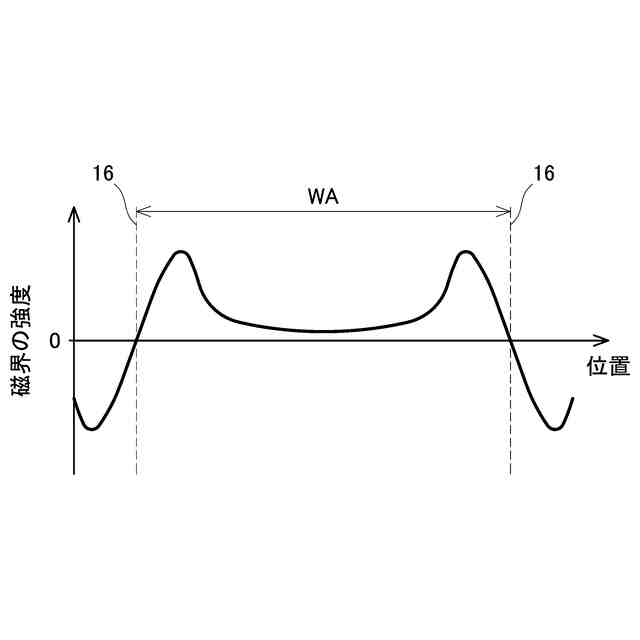
実施例の作業エリアWA内部と外部での磁界の強度の波形とガイドエリアGAの内部と外部での磁界の強度の波形を示す図である。
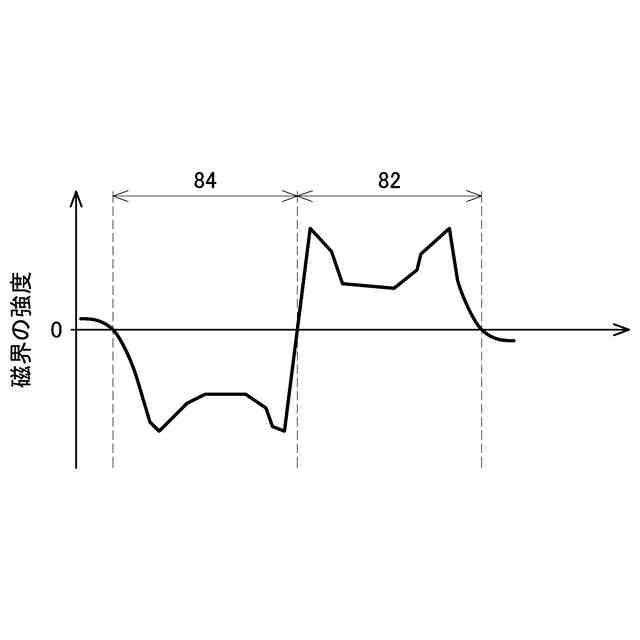
実施例のステーションワイヤ20内部と外部での磁界の強度の波形を示す図である。
実施例の自律制御処理を示すフローチャートである。
実施例の離脱処理を示すフローチャートである。
実施例の帰還処理を示すフローチャートである。
実施例の作業ロボット12が帰還方向D3に移動しているときの作業ロボット12とガイドワイヤ18または第1境界ワイヤ部16aとの位置関係を示す図である。
実施例の作業ロボット12が帰還方向D4に移動しているときの作業ロボット12と境界ワイヤ16との位置関係を示す図である。
実施例のドッキング処理を示すフローチャートである。
実施例のドッキング処理中の作業ロボット12の移動を示す図である。
実施例の回避処理を示すフローチャートである。
【発明を実施するための形態】
【0008】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された自律移動システム、その製造方法及び使用方法を提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、以下の代表的な具体例の様々な特徴、ならびに、特許請求の範囲に記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又は特許請求の範囲に記載された特徴の構成とは別に、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
クリーナ
18日前
株式会社マキタ
インパクト工具
3日前
株式会社マキタ
インパクト工具
3日前
株式会社マキタ
モータユニット
5日前
株式会社マキタ
鉄筋結束機およびリール
3日前
株式会社マキタ
モータユニットおよび作業機
5日前
株式会社マキタ
インパクト工具、スピンドル及びスピンドルの製造方法
4日前
エイブリック株式会社
基準電圧回路
9日前
和研工業株式会社
多連レバー機構
22日前
株式会社クボタ
作業車
12日前
ローム株式会社
半導体集積回路
17日前
株式会社ダイフク
搬送車
12日前
エイブリック株式会社
ボルテージレギュレータ
9日前
トヨタ自動車株式会社
工作機械の制御装置
10日前
トヨタ自動車株式会社
工作機械の制御装置
11日前
株式会社ダイフク
物品搬送設備
10日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
アズビル株式会社
制御システムおよび制御方法
23日前
アズビル株式会社
制御システムおよび制御方法
23日前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
29日前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
9日前
株式会社ダイヘン
搬送車
9日前
株式会社ダイヘン
搬送車
9日前
株式会社ダイヘン
搬送車
9日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
井関農機株式会社
作業車両
5日前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
15日前
オルガノ株式会社
運転管理方法及び運転管理装置
12日前
ローム株式会社
バイアス回路
11日前
ミツミ電機株式会社
多方向入力装置
15日前
ミツミ電機株式会社
多方向入力装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ