TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025046709
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023154953
出願日
2023-09-21
発明の名称
パラレルリンクを含むロボット、および、パラレルリンクを含むロボットの製造方法
出願人
日本精工株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
A61B
34/30 20160101AFI20250326BHJP(医学または獣医学;衛生学)
要約
【課題】アライメント調整が簡便かつ確実に行うことができるパラレルリンクを含むロボットを提供すること。
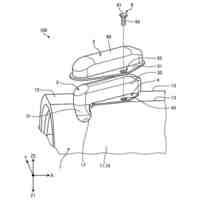
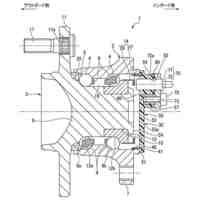
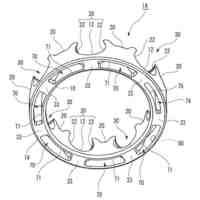
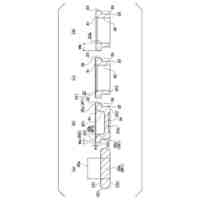
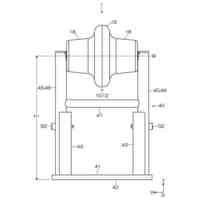
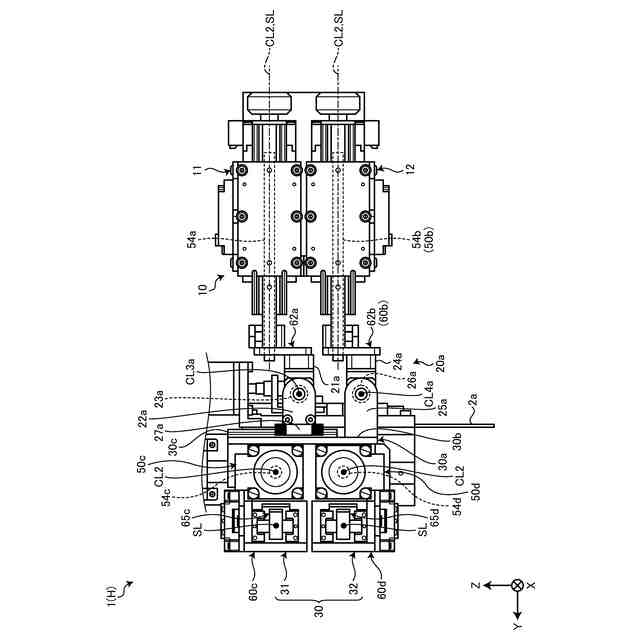
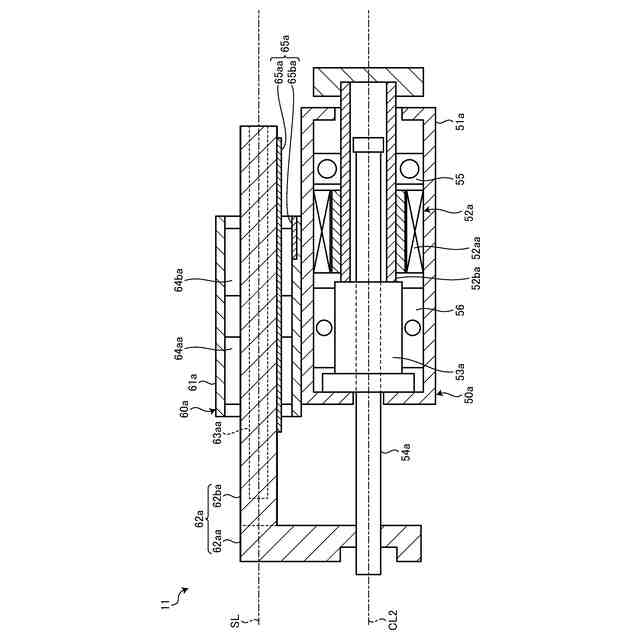
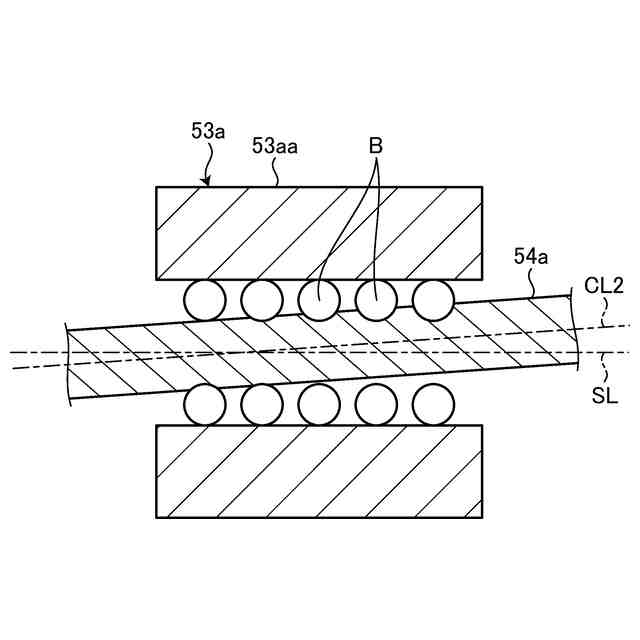
【解決手段】パラレルリンクを含むロボット1は、ハウジング51e、ハウジング51eに収納されているナット53e、および、ナット53eが回転することでハウジング51eに対して移動するねじ軸54eを有する駆動部50eと、基準軸線SL2に沿ってねじ軸54eと一体に移動するスライド部材42bと有し、基準軸線SL2に対してねじ軸54eの中心軸線CL2が傾斜可能にハウジング51eに連結される第2ガイド部42と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ハウジング、前記ハウジングに収納されているナット、および、前記ナットが回転することで前記ハウジングに対して移動するねじ軸を有する駆動部と、
基準軸線に沿って前記ねじ軸と一体に移動するスライド部材と有し、前記基準軸線に対して前記ねじ軸の中心軸線が傾斜可能に前記ハウジングに連結されるガイド部と、を備える、
パラレルリンクを含むロボット。
続きを表示(約 1,400 文字)
【請求項2】
前記ハウジングが固定されている第1板部材と、
前記ガイド部に含まれ、前記スライド部材が相対移動可能に取り付けられる第2板部材と、
第1側面および第2側面を有する角柱形状であり、前記第1側面に前記第1板部材の板面が接触し、かつ、前記第2側面に前記第2板部材の板面が接触する角柱部材と、
前記角柱部材と嵌合し、前記第1板部材を前記角柱部材に固定する複数の第1ネジと、
前記角柱部材と嵌合し、前記第2板部材を前記角柱部材に固定する複数の第2ネジと、をさらに備え、
前記第1板部材は、前記第1ネジが貫通する複数の第1貫通穴を有し、
前記第2板部材は、前記第2ネジが貫通する複数の第2貫通穴を有し、
前記第1貫通穴の大きさは、前記第1ネジが仮締めされている状態において、前記第1板部材の板面と前記第1側面とが接触した状態で前記角柱部材に対する前記第1板部材の姿勢が調整可能な大きさであり、
前記第2貫通穴の大きさは、前記第2ネジが仮締めされている状態において、前記第2板部材の板面と前記第2側面とが接触した状態で前記角柱部材に対する前記第2板部材の姿勢が調整可能な大きさである、
請求項1に記載のパラレルリンクを含むロボット。
【請求項3】
前記第1ネジの個数および前記第2ネジの個数は、それぞれ2個以上である、
請求項2に記載のパラレルリンクを含むロボット。
【請求項4】
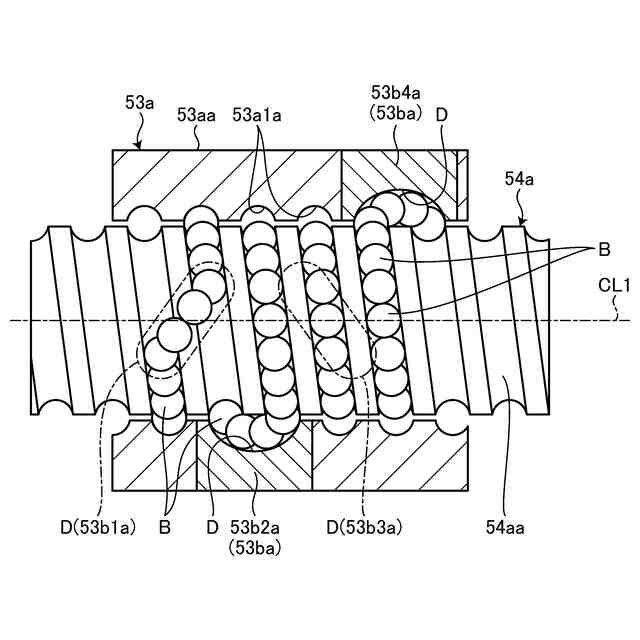
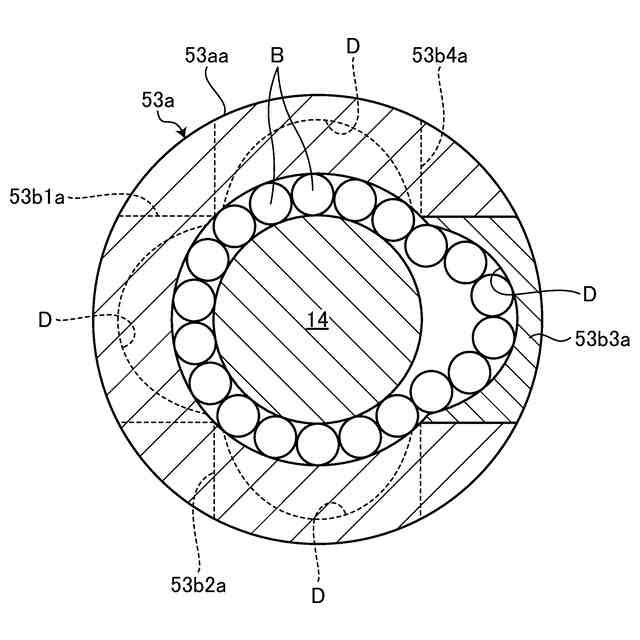
前記ナットは、コマ式のナット、エンドデフレクタ式のナット、および、チューブ式のナットのうち何れか1つである、
請求項2に記載のパラレルリンクを含むロボット。
【請求項5】
前記ナットは、複数のコマ部を有する、
請求項2に記載のパラレルリンクを含むロボット。
【請求項6】
前記スライド部材には、エンドエフェクタが取り付けられる、
請求項2に記載のパラレルリンクを含むロボット。
【請求項7】
2つの前記駆動部を有し、前記第2板部材に対して傾斜可能に前記第2板部材に接続される腕ユニットをさらに備え、
前記腕ユニットが有する2つの前記ねじ軸の中心軸線同士は、互いに平行となるように配置されている、
請求項2に記載のパラレルリンクを含むロボット。
【請求項8】
ナットおよび前記ナットが回転することで移動するねじ軸が配置されるハウジングが固定される第1板部材と角柱部材の第1側面とを接触させた状態で、前記第1板部材と前記角柱部材とを複数の第1ネジによって仮固定する工程と、
スライド部材が基準軸線に沿って前記ねじ軸と一体に移動可能に配置される第2板部材と前記角柱部材の第2側面とを接触させた状態で、前記第2板部材と前記角柱部材とを複数の第2ネジによって仮固定する工程と、
前記第1板部材と前記角柱部材とが仮固定された状態かつ前記第2板部材と前記角柱部材とが仮固定された状態で、前記角柱部材に対する前記第1板部材の姿勢、および、前記角柱部材に対する前記第2板部材の姿勢を調整することで、前記ねじ軸の中心軸線との前記基準軸線とのアライメント調整を行う工程と、を含む、
パラレルリンクを含むロボットの製造方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、パラレルリンクを含むロボット、および、パラレルリンクを含むロボットの製造方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、複数の駆動装置を備えるパラレルリンクを含むロボットが開示されている。駆動装置は、ロッドを進退駆動するアクチュエータ、ロッドの先端部が固定され、ロッドを一軸方向に案内するスライダを備える。
【0003】
このような駆動装置においては、ロッドの移動量の精度を確保するために、ロッドの中心軸線と一軸方向とを平行にするアライメント調整が行われる。なお、特許文献1に開示されているように、ロッドは、ナットが回転することで移動するねじ軸でもよい。この場合、ねじ軸はスライダに固定され、ねじ軸の中心軸線と一軸方向とを平行にするアライメント調整が行われる。また、特許文献1のロボットにおいては、パラレルリンクを含む構成にすることで小型化を図ることができる。一方で、パラレルリンクを含むロボットにおいては、各軸の位置決め精度がロボット全体の位置決め精度へ大きく影響することが知られている。
【先行技術文献】
【特許文献】
【0004】
特許第7088440号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のようにナットの回転によって移動するねじ軸がスライダによって一軸方向(基準軸線に沿う方向)に案内される場合、基準軸線に対するねじ軸の中心軸線の傾斜が大きくなるほど、いわゆるリード誤差が大きくなる。よって、ねじ軸の中心軸線と基準軸線とを平行にするアライメント調整が簡便かつ確実に行われることが望ましい。
【0006】
本開示の態様は、ねじ軸の中心軸線と基準軸線とを平行にするアライメント調整が簡便かつ確実に行うことができるパラレルリンクを含むロボット、および、パラレルリンクを含むロボットの製造方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の態様において、パラレルリンクを含むロボットは、ハウジング、前記ハウジングに収納されているナット、および、前記ナットが回転することで前記ハウジングに対して移動するねじ軸を有する駆動部と、基準軸線に沿って前記ねじ軸と一体に移動するスライド部材と有し、前記基準軸線に対して前記ねじ軸の中心軸線が傾斜可能に前記ハウジングに連結されるガイド部と、を備える。
【0008】
本開示の態様によれば、ねじ軸の中心軸線が基準軸線に対して傾斜可能であり、ねじ軸の中心軸線と基準軸線とが平行となるように調整することができる。よって、ねじ軸の中心軸線と基準軸線とを平行にするアライメント調整を簡便かつ確実に行うことができる。
【0009】
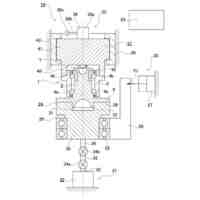
本開示の態様において、パラレルリンクを含むロボットは、前記ハウジングが固定されている第1板部材と、前記ガイド部に含まれ、前記スライド部材が相対移動可能に取り付けられる第2板部材と、第1側面および第2側面を有する角柱形状であり、前記第1側面に前記第1板部材の板面が接触し、かつ、前記第2側面に前記第2板部材の板面が接触する角柱部材と、前記角柱部材と嵌合し、前記第1板部材を前記角柱部材に固定する複数の第1ネジと、前記角柱部材と嵌合し、前記第2板部材を前記角柱部材に固定する複数の第2ネジと、をさらに備え、前記第1板部材は、前記第1ネジが貫通する複数の第1貫通穴を有し、前記第2板部材は、前記第2ネジが貫通する複数の第2貫通穴を有し、前記第1貫通穴の大きさは、前記第1ネジが仮締めされている状態において、前記第1板部材の板面と前記第1側面とが接触した状態で前記角柱部材に対する前記第1板部材の姿勢が調整可能な大きさであり、前記第2貫通穴の大きさは、前記第2ネジが仮締めされている状態において、前記第2板部材の板面と前記第2側面とが接触した状態で前記角柱部材に対する前記第2板部材の姿勢が調整可能な大きさである。
【0010】
本開示の態様によれば、ねじ軸の中心軸線が角柱部材を介して基準軸線に対して傾斜し、ねじ軸の中心軸線と基準軸線とが平行となるように調整することができる。よって、ねじ軸の中心軸線と基準軸線とを平行にするアライメント調整を簡便かつ確実に行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
信号出力回路
12日前
日本精工株式会社
ボールねじ装置
10日前
日本精工株式会社
ハブユニット軸受
10日前
日本精工株式会社
磁歪式トルクセンサ
24日前
日本精工株式会社
センサ付ハブユニット軸受
23日前
日本精工株式会社
ハブユニット軸受の予圧測定方法
20日前
日本精工株式会社
玉軸受用冠型保持器、及び玉軸受
23日前
日本精工株式会社
ハブユニット軸受の外輪の製造方法
3日前
日本精工株式会社
転がり軸受用冠形保持器、及び転がり軸受
3日前
日本精工株式会社
異常診断装置、異常診断方法およびプログラム
17日前
日本精工株式会社
アクチュエータ装置の制御装置、および制御方法
17日前
日本精工株式会社
玉軸受、及び、玉軸受におけるグリースの塗布方法
23日前
日本精工株式会社
転がり軸受の荷重推定装置、荷重推定方法、およびプログラム
3日前
日本精工株式会社
機械部品の製造方法、軸受の製造方法、機械部品、軸受、機械、及び車両
11日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
3日前
日本精工株式会社
検出装置付きハブユニット軸受及び検出装置付きハブユニット軸受システム
3日前
日本精工株式会社
歯車装置、直動アクチュエータ、バックラッシ角度測定方法およびプログラム
18日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、及び車両の製造方法
10日前
日本精工株式会社
筒状部材の製造方法、機械装置の製造方法、および車両の製造方法
10日前
個人
健康器具
2か月前
個人
歯の掃除具
5か月前
個人
歯茎みが品
3か月前
個人
鼾防止用具
2か月前
個人
塗り薬塗り具
4か月前
個人
脈波測定方法
2か月前
個人
身体牽引装置
6か月前
個人
マッサージ機
2か月前
個人
乗馬テラピー
6か月前
個人
洗井間専家。
1か月前
個人
脈波測定方法
2か月前
個人
導電香
2か月前
個人
白内障治療法
1か月前
個人
ホバーアイロン
18日前
個人
収納容器
4か月前
個人
健康器具
4か月前
個人
クリップ
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ