TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025056678
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023166292
出願日
2023-09-27
発明の名称
制御システム、制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250401BHJP(制御;調整)
要約
【課題】環境に応じた停止位置を決定すること。
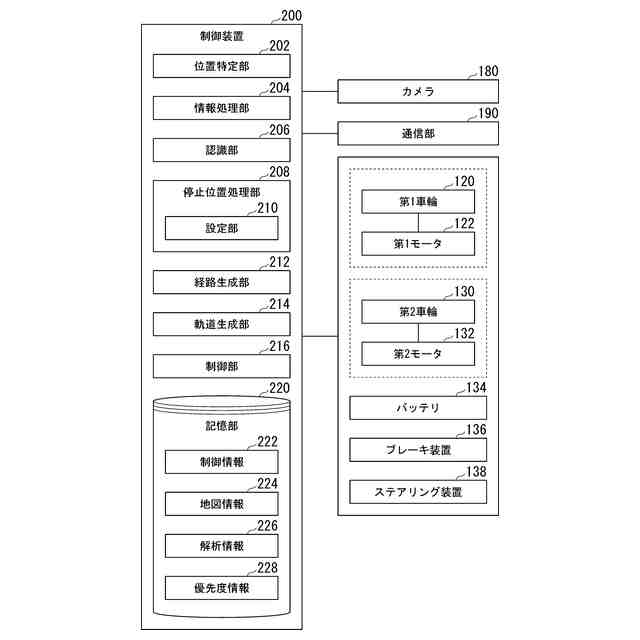
【解決手段】制御システムは、歩行者が移動可能な領域を自律して移動する移動体を制御する制御システムであって、前記移動体の周辺の物体を認識する認識部と、所定のイベントが発生したときに停止する領域である候補領域を特定する特定部であって、複数の候補領域の情報を参照して、前記複数の候補領域から、前記物体が干渉する前記候補領域を除いた前記候補領域であり、且つ優先度に応じた前記候補領域を特定する特定部と、特定した候補領域に前記移動体を移動させる制御部と、を備える制御システムである。
【選択図】図5
特許請求の範囲
【請求項1】
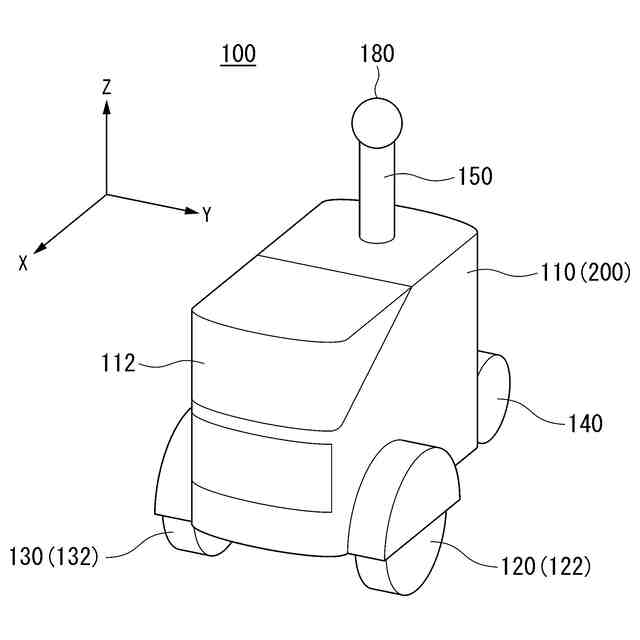
歩行者が移動可能な領域を自律して移動する移動体を制御する制御システムであって、
前記移動体の周辺の物体を認識する認識部と、
所定のイベントが発生したときに停止する領域である候補領域を特定する特定部であって、
複数の候補領域の情報を参照して、
前記複数の候補領域から、前記物体が干渉する前記候補領域を除いた前記候補領域であり、且つ優先度に応じた前記候補領域を特定する特定部と、
特定した候補領域に前記移動体を移動させる制御部と、
を備える制御システム。
続きを表示(約 970 文字)
【請求項2】
前記特定部は、記憶部に記憶された優先度が付与された複数の候補領域の情報を参照して、
前記複数の候補領域から前記物体が干渉する前記候補領域を除いた前記候補領域であり、且つ前記優先度に応じた前記候補領域を特定する、
請求項1に記載の制御システム。
【請求項3】
前記候補領域の情報は、前記候補領域の優先度の情報を含み、
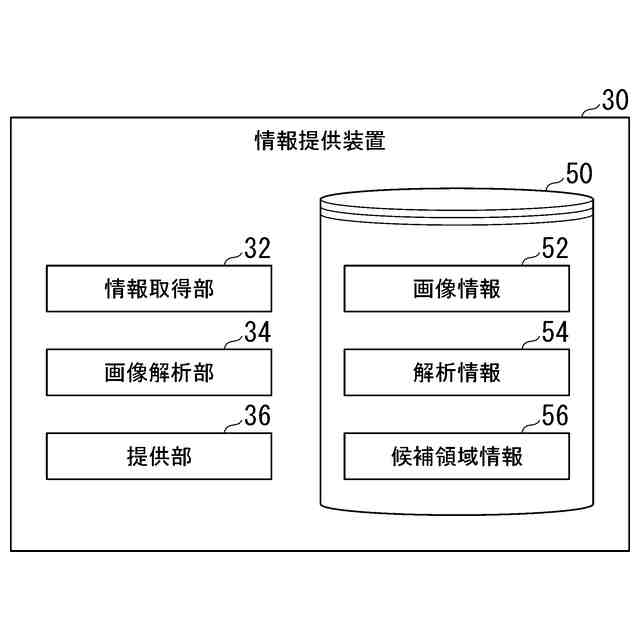
前記優先度は、前記移動体に搭載されていない前記移動体外の装置により提供された情報に基づいて設定される、
請求項1または2に記載の制御システム。
【請求項4】
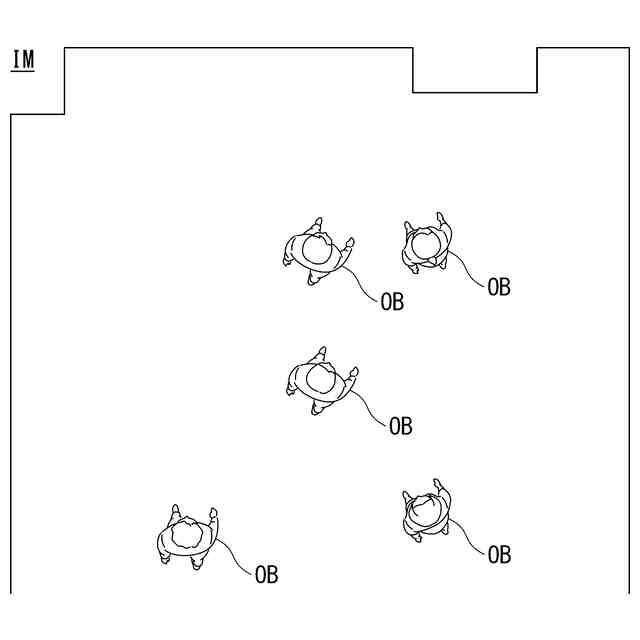
前記移動体外の装置により提供された情報は、前記候補領域ごとの過去の交通流の情報である、
請求項3に記載の制御システム。
【請求項5】
前記過去の交通流が閾値以上の前記候補領域の優先度を、前記過去の交通流が前記閾値未満の前記候補領域の優先度よりも低く設定する設定部を備える、
請求項4に記載の制御システム。
【請求項6】
前記設定部は、前記過去の交通流の情報に加え、更に前記候補領域のそれぞれに対応する領域の大きさに対する前記移動体の大きさと、前記移動体が追従している対象と前記候補領域との距離とのうち、一以上の項目に基づいて前記優先度を設定する、
請求項5に記載の制御システム。
【請求項7】
前記設定部は、前記移動体に対して前記候補領域が大きいほど、当該候補領域の優先度を大きく設定する、
請求項6に記載の制御システム。
【請求項8】
前記設定部は、前記対象と前記候補領域との距離が短いほど、当該候補領域の優先度を大きく設定する、
請求項6に記載の制御システム。
【請求項9】
前記設定部は、前記過去の交通流が所定値以上の領域を候補領域から除外する、
請求項6に記載の制御システム。
【請求項10】
前記特定部は、前記優先度と、前記候補領域のそれぞれに前記移動体が移動する際のコストとリスクとのうち一方または双方とに基づいて、前記候補領域を特定する、
請求項7に記載の制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システム、制御方法、およびプログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、ユーザを所望の場所に案内したり、荷物を搬送したりするロボットが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2012-111011号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のシステムでは、移動体の停止位置については十分に検討されていなかった。
【0005】
本発明は、このような事情を考慮してなされたものであり、環境に応じた停止位置を決定することができる制御システム、制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る制御システム、制御方法、およびプログラムは、以下の構成を採用した。
(1):この発明の一態様に係る制御システムは、歩行者が移動可能な領域を自律して移動する移動体を制御する制御システムであって、前記移動体の周辺の物体を認識する認識部と、所定のイベントが発生したときに停止する領域である候補領域を特定する特定部であって、複数の候補領域の情報を参照して、前記複数の候補領域から、前記物体が干渉する前記候補領域を除いた前記候補領域であり、且つ優先度に応じた前記候補領域を特定する特定部と、特定した候補領域に前記移動体を移動させる制御部と、を備える制御システムである。
【0007】
(2):上記(1)の態様において、前記特定部は、記憶部に記憶された優先度が付与された複数の候補領域の情報を参照して、前記複数の候補領域から前記物体が干渉する前記候補領域を除いた前記候補領域であり、且つ前記優先度に応じた前記候補領域を特定する。
【0008】
(3):上記(1)または(2)の態様において、前記候補領域の情報は、前記候補領域の優先度の情報を含み、前記優先度は、前記移動体に搭載されていない前記移動体外の装置により提供された情報に基づいて設定される。
【0009】
(4):上記(4)の態様において、前記移動体外の装置により提供された情報は、前記候補領域ごとの過去の交通流の情報である。
【0010】
(5):上記(4)の態様において、前記過去の交通流が閾値以上の前記候補領域の優先度を、前記過去の交通流が前記閾値未満の前記候補領域の優先度よりも低く設定する設定部を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
7日前
和研工業株式会社
多連レバー機構
20日前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
10日前
ローム株式会社
半導体集積回路
15日前
株式会社ダイフク
搬送車
10日前
エイブリック株式会社
ボルテージレギュレータ
7日前
トヨタ自動車株式会社
工作機械の制御装置
8日前
トヨタ自動車株式会社
工作機械の制御装置
9日前
愛知機械テクノシステム株式会社
無人搬送車
29日前
株式会社ダイフク
物品搬送設備
8日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
21日前
アズビル株式会社
制御システムおよび制御方法
21日前
日本精工株式会社
制御装置および制御方法
27日前
株式会社ダイヘン
搬送車
7日前
株式会社ダイヘン
搬送車
7日前
株式会社ダイヘン
搬送車
7日前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
7日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
29日前
井関農機株式会社
作業車両
3日前
ミツミ電機株式会社
多方向入力装置
13日前
ミツミ電機株式会社
多方向入力装置
27日前
ミツミ電機株式会社
多方向入力装置
13日前
ミツミ電機株式会社
多方向入力装置
27日前
ミツミ電機株式会社
多方向入力装置
27日前
ミツミ電機株式会社
多方向入力装置
27日前
ミツミ電機株式会社
多方向入力装置
13日前
ローム株式会社
バイアス回路
9日前
ミツミ電機株式会社
多方向入力装置
13日前
ミツミ電機株式会社
多方向入力装置
13日前
オルガノ株式会社
運転管理方法及び運転管理装置
10日前
ミツミ電機株式会社
多方向入力装置
27日前
HEROZ株式会社
異常検知アルゴリズムの評価システム
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ