TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043359
公報種別
公開特許公報(A)
公開日
2025-03-31
出願番号
2023150637
出願日
2023-09-18
発明の名称
3つの運動エネルギーを有する電動・エアースクリュードライバー
出願人
美之嵐機械工業有限公司
,
MIJY-LAND INDUSTRIAL CO., LTD.
代理人
個人
主分類
B25B
23/157 20060101AFI20250324BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本発明は3つの運動エネルギーを有する電動・エアースクリュードライバーを提供する。
【解決手段】スクリュードライバーの3つの運動エネルギー由来は、高速モーター装置、減反作用力ハンマーブロック装置と非対称クラッチ装置を含む。該高速モーター装置は高回転速度の第1運動エネルギーを提供し、該減反作用力ハンマーブロック装置は該高速モーター装置のローター重量を増して、更に回転速度を引き上げ、第2の運動エネルギーを得る。該非対称クラッチは2つの異なる中心距離のスチールボールとカムレールによる発生した圧縮トルクと、トルクバネは押し出されて回転変形により発生した螺旋角で、エネルギー貯蔵の射出力の第3の運動エネルギーを取得する。また、本発明は更に油圧式耐震装置を含み、前記の運動エネルギーの大幅な増加による騒音の増加を低減し、緩衝作用を達成し、より正確なトルク値を得ることができる。
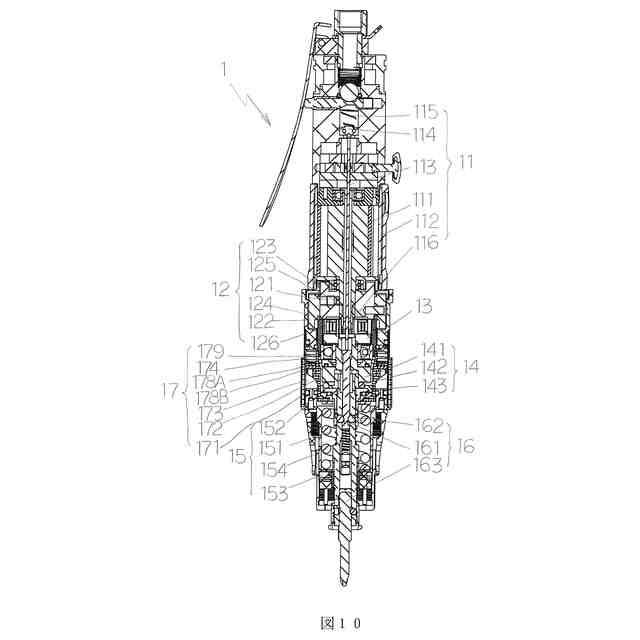
【選択図】図10
特許請求の範囲
【請求項1】
次のように、
第1の運動エネルギーを提供するには、ローターと1つの中外座を有し、このローターの軸心は1つのピンを貫通しており、且つ該ピンの一端はエアバルブプレートを備えており、このエアバルブプレートの上に1文字型バネが設けられて当接し、該ローターのもう一方の端に1つのマスターギアと結合する高速モーター装置と、
第2の運動エネルギーを提供するには、該高速モーター装置の回転子の動力出力方向に付加して、該ローターに貫通され、固定ネジハンマー、反作用力ハンマー、ハンマー台座、Cリングといくつかのスチールボールを含み、該ハンマー台座はCリングを利用して反作用力ハンマーと結合して固定し、該反作用力ハンマーの周面に1つの凹んだ溝口を形成し、該溝口の片側に貯蔵タンクを形成し、該固定ネジハンマーは該貯蔵タンク中に置かれ、該固定ネジハンマーの一端を該ハンマ台座を貫通してスチールボールで連結して固定し、該減反作用力ハンマーブロック装置を貫通するローター端縁を遊星歯盤を再係合して伝動する減反作用力ハンマーブロック装置と、
該第1運動エネルギーと該第2運動エネルギーの連合出力を連結するために、1つ以上の歯車が含まれる該遊星歯盤を噛合し、該高速モーター装置の出力動力を連結する歯車装置と、
第3運動エネルギーを提供するには、第1運動エネルギーと第2運動エネルギーを重ね、上部クラッチ、スチールボール、下部クラッチを含み、該上部クラッチ表面には2つの異なる中心距離の内側、外側カムレールがあり、内側、外側カムレール上にはそれぞれスチールボールが設置され、且つ該下部クラッチで支持としてクランプ位置を形成している非対称クラッチ装置と、
トルクバネが含まれて、一方の端は該下部クラッチと当接し、もう一方の端はトルクシリンダバネ座金台とキツく当接し、該トルクバネのキツさと緩み変化を制御することを提供するトルクシリンダとトルク調整リングが外部でカバーされるトルクバネ装置、及び
1端に撃針が貫通されて該ピンと当接し、且つ該下部クラッチと連結し、変位を制限するために該撃針に2つ撃針が結合され、該連結軸のもう1つの端に嵌め込まれるツールヘッドを提供する連結軸装置とを含むことを特徴とする3つの運動エネルギーを有する電動・エアースクリュードライバー。
続きを表示(約 360 文字)
【請求項2】
更に油圧耐震装置を含み、油圧アウターシート、下部クラッチと連動される下部クラッチピストンを含み、該下部クラッチピストンと該油圧アウターシートが挟む空間内に上部液体タンク、下部液体タンクと該上、下液体タンクを連通する油圧穴、該上液体タンクの上に注油穴があって、内に注油ネジが設置され、該下液体タンク内に漏れ防止オイルシールが設けられて該油圧穴と当接し、及び漏れ防止バネ座金が戻しバネに当接することを特徴とする請求項1の3つの運動エネルギーを有する電動・エアースクリュードライバー。
【請求項3】
該減反作用力ハンマーブロック装置は、ハンマー台座周面に均等に配置された一個以上の固定ネジハンマーが含まれることを特徴とする請求項1の3つの運動エネルギーを有する電動・エアースクリュードライバー。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動・エアースクリュードライバーの構造改良に関わり、特に3つの運動エネルギーを有する電動・エアースクリュードライバーに関する。
続きを表示(約 4,500 文字)
【背景技術】
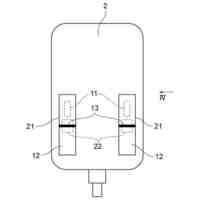
【0002】
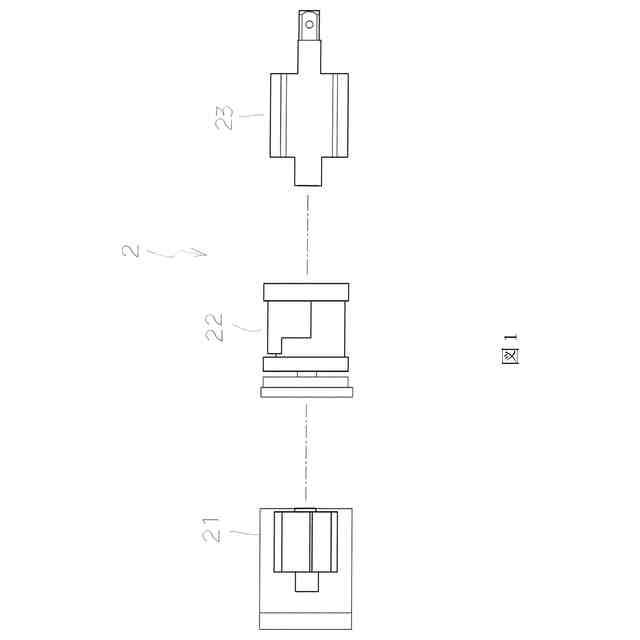
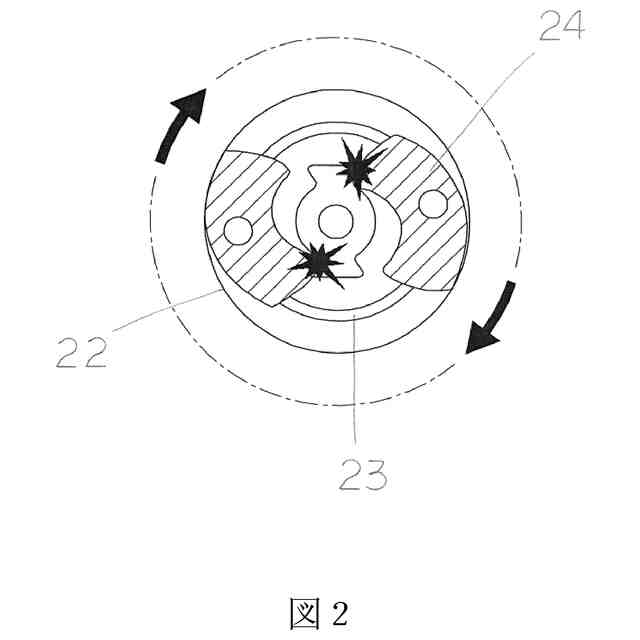
よく知られている冲撃式パワーレンチ(2)は、図1に示すように、主な機構構成は、モータ(21)、ハンマーブロック(22)、連結軸(23)である。図2に示すように、冲撃式原理は、回転冲撃を繰り返すことを回転冲撃式クラッチと呼び、ハンマーブロック(24)が連結軸(23)を冲撃すると、閉合状態になり、大きなトルクを発生する;衝撃が終了した後開状態になりトルクがない。 そのため、運動エネルギーの由来は、モーターユニット+ハンマーブロックベースユニットの組み合わせで計2つの運動エネルギーになる。該ハンマーブロックベースと連結軸の関係はハンマーを手に持って釘を打つようなもので、打つ速度が速いほど、大きな力を生むことができる。通常このようなツールの上に調圧弁があって、モーターの速度を調整し、回転速度が速くなるとトルクが大きく、回転速度が遅くなるとトルクが小さく、ツールの最終回転速度は普通に6000~9000rpmにさせる役割がある。該冲撃レンチの長所は、モーターの速度が速く、運動エネルギーが大きく、反作用力が小さく、構造が簡単である。 短所では、トルクが設定値に達すると、ハンマーブロックはだー、だー、だーというハンマー打つの音が発生し、且つトルクの大きさは手で押す時間によるもの。 発生する運動エネルギーは主に速度からとるため、速度の速さはトルクの大きさに影響し、ネジロック時に締まりすぎたり、緩んだりする。一般的なトルクの精度は50%で、タイヤの整備工場でよく使われている。
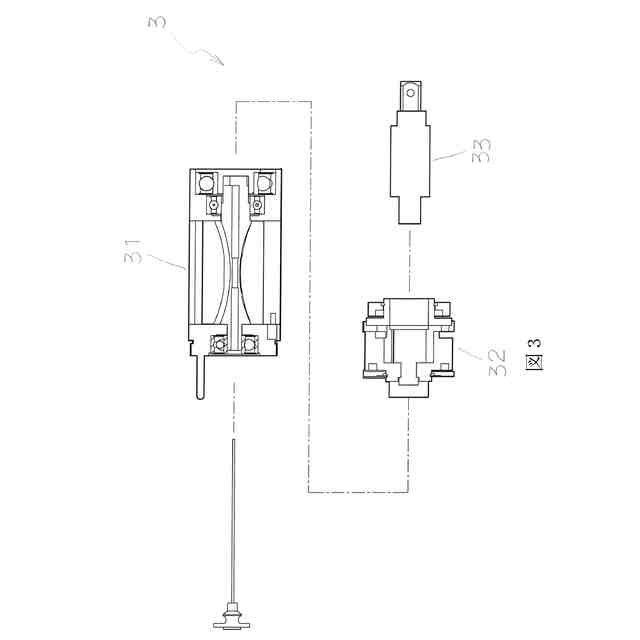
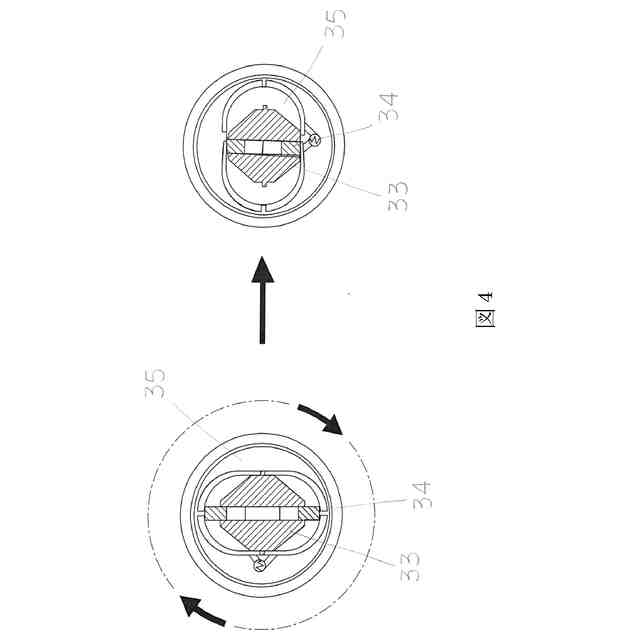
【0003】
よく知られているオイルパルススクリュードライバー(3)、図3に示すように、モータユニット(31)、オイルパルスユニット(32)、連結軸(33)は主な機構構成である。図4に示すように、該オイルパルスの原理は、接続軸(33)上のブレード(34)が高圧領域(H)まで回転する時に閉合となり、大きなトルクを発生する;低圧領域(L)が離れとし、トルクはない。オイル(35)は緩衝の媒体で、トルクが設定値に調整されるとモーターユニット(31)が自動的に停止し、ロックが完了する。運動エネルギー由来:モーターユニット+オイルパルスユニットの計2つの運動エネルギー。 該オイルパルススクリュードライバーの基本的な運動エネルギーの原理は冲撃レンチと少し同じで、オイルパルスは冲撃式の欠点を改善し、オイルを緩衝媒体として、そしてブレードを利用してオイルに高圧と低圧を発生させ、モーターの高速回転後に冲撃パルスを発生して運動エネルギーを発生させ、騒音値が相対的に低く、油圧油はハンマーブロックと連結軸の冲撃音がないため、使用時に油の温度上昇による粘度の変化、トルクが正しくなく、精度は普通で、約±15%、モーターの回転数は約3000~7000rpm、運動エネルギー由来速度は少し前の冲撃式レンチを下回っている。
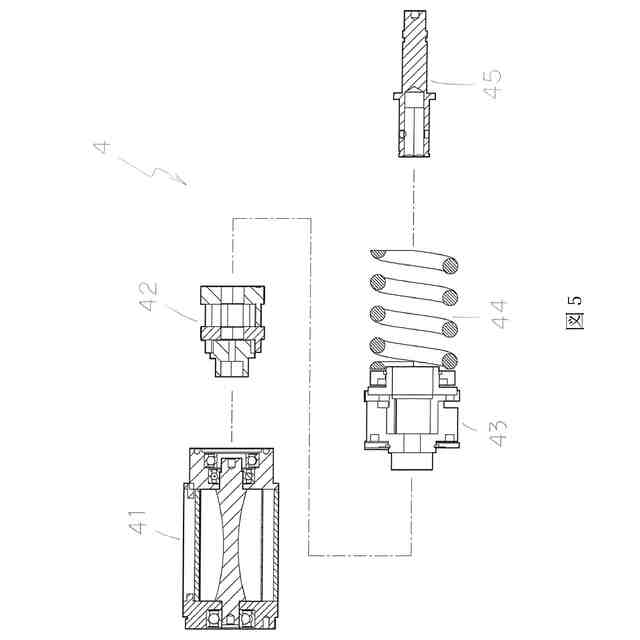
【0004】
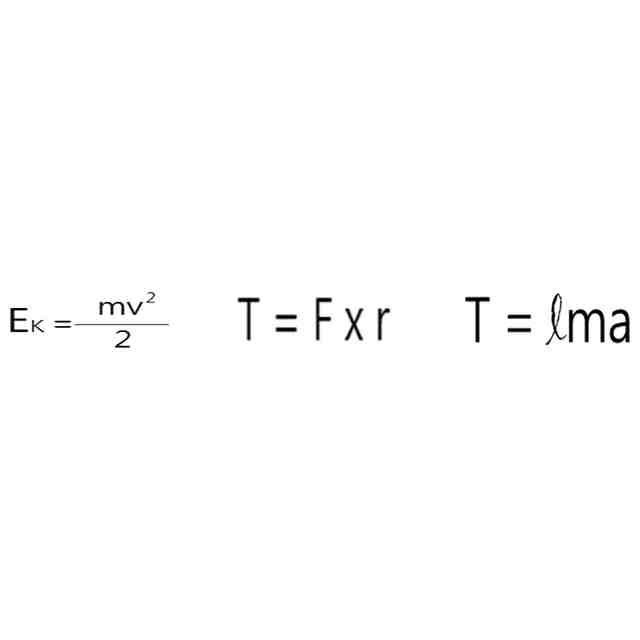
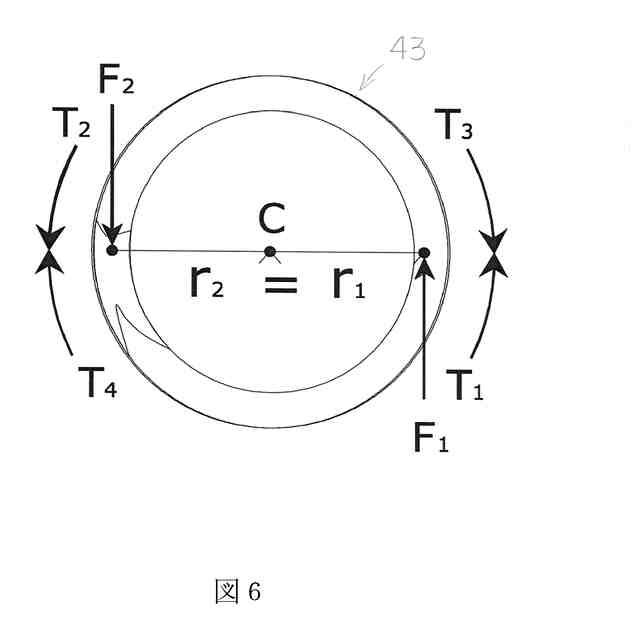
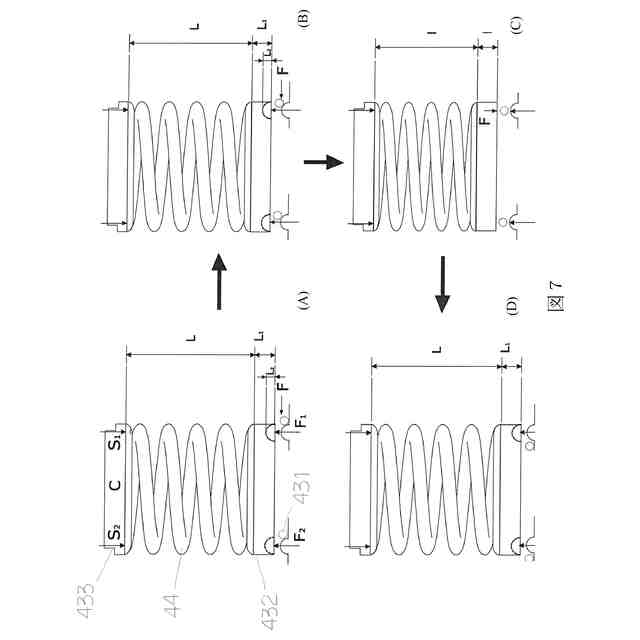
また、よく知られている半自動クラッチスクリュードライバー(4)は、図5に示すように、主な機構構成は、モーターユニット(41)、歯車ユニット(42)、クラッチユニット(43)、トルクバネ(44)、連結軸(45)である。運動エネルギー由来:モーターユニット計1つの運動エネルギー。 図6に示すように、該クラッチユニットの原理は、対称に設計されるカム構造におけるクラッチセンター(C)とスチールボール中心距離が一致(r
1
=r
2
)することを「対称クラッチ」と呼ぶ。ここの、T=Fr(T=トルク、F1&F2=作用力、r=半径、C=中心点)、式によるとT1=F1r1、T2=F2r2、T1+T2はツールの合計トルク(T)で、T3+T4は手の把持力(反作用力)で、クラッチ半径が対称(r=r
2
)のため、作用力=反作用力。図7に示すように、トルクバネの側視の概略図において、該クラッチユニット(43)はスチールボール(431)、カム(432)(すなわち下部クラッチ、上部クラッチ)、トルクシリンダバネ座金台(433)を含み、ここの、図(A)は待機(トルク値なし)時、該クラッチのスチールボール(431)はカム(432)に対して抵抗力(F)を発生し、該カム(432)は上昇し、トルクバネ(44)に対して上昇力(F1とF2)を発生し、該トルクバネ(44)は圧縮力(S1とS2)を発生する;運転時に力を加える場合は図(B)のように、該トルクバネ(44)の高さ(L)は徐々に短くなり、L1=下部クラッチの高さ、L2=カム上昇高さ; カム(432)は図(C)のように上死点まで上昇し、つまりトルクの最大値まで移動し、対称カムの設計のため、該カム(432)を上昇、下降させる時、該スチールボール(431)も同期して上昇、下降することができるが、トルクバネ(44)とトルクシリンダバネ座金台(433)は上昇と下降する時にすべてねじることはなく、上記の動作はクラッチを回転させ、T1とT2に運動エネルギーを発生させ、すなわちツールの合計トルク(総合力トルク)=T1+T2;最終的にこのカム(432)は図(D)のように離脱し、該トルクバネ(44)の長さ(L)は元に戻る。前記の説明をまとめると、クラッチユニット内にカムとスチールボールが設けられているため、トルクバネがカムを上下に動かして、弾性の大きさを調整することができる。一般に市販されている充電式スクリュードライバーは、すべて半自動クラッチを使用している。ネジロックが予想値に達すると、クラッチが滑り (だーだーだーという衝撃音が出る)、 この時、引き金のボタンを放せば完了。精度は人の操作と打つ時間の長さによって影響され、トルクは正確ではなく、約±10~30%の誤差がある。反作用力が大きいため、一般的にピストルタイプツールに設計し、ストレートタイプツールはM4以下のネジを固定するのに用いられる。
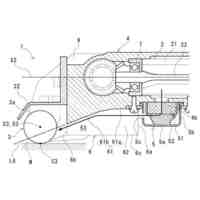
【0005】
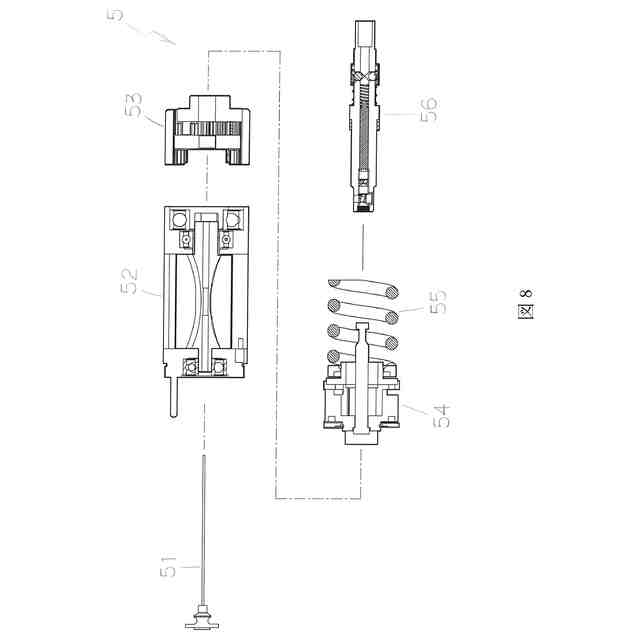
全自動クラッチトルク自動停止スクリュードライバー(5)は、図8に示すように、主な機構構成は、エアバルブプレートとニードル(51)、モーターユニット(52)、歯車ユニット(53)、クラッチユニット(54)、トルクバネ(55)、連結軸(56)を含む。運動エネルギー由来はモーターユニット合計1つの運動エネルギーである。該クラッチユニットの原理は、対称カムの原理であり、前記の半自動クラッチは対称の原理のように、唯一の違い点では、トルク設定値に到達した時、該バルブプレートとニードル(51)はモーターユニット(52)を自動的に停止させ、該連結軸(56)はもう回転しなくなり、ロックが完了する。トルク自動停止スクリュードライバー(Auto shut-off Screwdriver)は、半自動クラッチスクリュードライバーからの進化版で、前記の半自動トルク繰り返し精度が±10~30%に達するため、専門の生産ラインではISO5393の国際精度要求仕様に合致できないが、この世代のクラッチトルク自動停止スクリュードライバーは、国際精度の±3%で達することができる。半自動トルクと同じで、運動エネルギーはすべてモーターユニットから由来で、該歯車ユニットは回転速度を減らすことを担当し、速度比を変更することによって回転数を増やしたりトルクを増やすことができ、トルクが大きく、回転数が遅い;トルクが小さく、回転速度が速い。トルクが設定値に達した後、該クラッチユニットはモーターユニットを自動的にオフ(Auto Shut-off)して回転を停止し、ネジロックが完了したため、トルクの精度が高い。該トルクバネはトルク値の大きさの調整を担当する。反作用力が大きいため、大きなネジをロックする時はロボットアーム(Torque Arm)を使用して作業者の負傷を防ぐことができる。
【0006】
このことから、本件発明者は、よく知られている自動ツールにはまだ完全ではなく更に改善する余地があることを痛感し、長年蓄積してきた設計経験を頼りに、実験、試作を重ねた結果、より実用的な本発明が生まれ、業界及び社会大衆に幸福をもたらすことができると期待している。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の主な目的は、3つの運動エネルギーを有する電動/空気スクリュードライバーを提供することにあり、発明者の設計によりスクリュードライバーの3つの運動エネルギー装置の重ね合わせを提供し、スクリュードライバーの操作・使用の上で、より大きな運動エネルギー、より低い反動力、より高い精度、及び動力が停止した後に緩衝があって、クラッチの離脱がよりスムーズで、騒音を低減し、操作者の感触をより快適にし、そしてより良い運動エネルギーと性能表現を得ることができるようにすることである。
【課題を解決するための手段】
【0008】
前記の目的を達成するために、本発明は3つの運動エネルギーを有する電動・エアースクリュードライバーを提供し、それは、高速モーター装置、減反作用力ハンマーブロック装置、歯車装置、非対称クラッチ装置、トルクバネ装置及び連結軸装置を含む。特に、該スクリュードライバーの運動エネルギー由来は、高速モーター装置、減反作用力ハンマーブロック装置と非対称クラッチ装置の合計3つの運動エネルギーを含む。ここの、該高速モーター装置は、高速回転動力を提供する第1運動エネルギーである;該減反作用力ハンマーブロック装置は該高速モーター装置の上に付加されて、該高速モーター装置の回転子重量を増して回転速度を上げて、トルクを大きくし、第2運動エネルギーを得ることができる;該非対称クラッチは、2つの異なる中心距離のスチールボールとカムレールが発生する圧縮トルクと、トルクバネは押し出されて回転変形して螺旋角を形成することにより、エネルギー貯蔵トルク(射出力)の第3運動エネルギーを獲得することができる。
【0009】
好ましい実施例において、該高速モーター装置はローターと中外座を有し、該ローターの軸心にピンを貫通し、該ローターの一端にエアバルブプレートを設け、一文字型バネが突当るように設け、該ローターは該エアバルブプレートのもう一端に対してマスターギアを結合している。
【0010】
好ましい実施例において、該減反作用力ハンマー装置は、1つまたは複数の固定ネジハンマー、1つの反作用力ハンマー、1つのハンマー台座、1つのCリングと複数のスチールボールを含み、該ハンマー固定座は該Cリングを利用して反作用力ハンマーと結合して固定し、該反作用力ハンマー周面に1つの凹んだ溝口を形成し、且つ該溝口の片側に1つの貯蔵タンクを形成し、該固定ネジハンマーは該貯蔵タンク内に置かれ、且つ、一端はハンマー台座の周面を貫通し、且つスチールボールを利用して連結・固定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイセイ
搬送装置
27日前
川崎重工業株式会社
ハンド
21日前
個人
けがき用治具
15日前
株式会社不二越
ロボット
13日前
国立大学法人金沢大学
ロボット
1か月前
個人
深孔スリーブ駆動ロッド構造
5日前
株式会社不二越
ロボット操作装置
12日前
川崎重工業株式会社
ロボット
13日前
個人
バール
5日前
川崎重工業株式会社
ロボットシステム
21日前
株式会社黒澤鉄工製作所
けがき用治具
15日前
株式会社デンソー
操縦桿
13日前
工機ホールディングス株式会社
作業機
今日
梅馨堂合同会社
人協働ロボットシステム
7日前
ARMA株式会社
UI付エンドエフェクタ
8日前
株式会社不二越
基板搬送用ロボット
22日前
アピュアン株式会社
衝撃工具
28日前
原利興工業有限公司
工具用スリーブ
1か月前
株式会社マキタ
作業機
12日前
学校法人法政大学
装着型アシスト装置
2日前
若井ホールディングス株式会社
レンチ構造とその製造方法
15日前
株式会社マキタ
電動工具
27日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
27日前
株式会社マキタ
電動工具
27日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
27日前
株式会社マキタ
電動工具
27日前
三菱電機株式会社
トルク締め個所検出システム
5日前
株式会社マキタ
打ち込み工具
27日前
高丸工業株式会社
ロボット操作システムの動作方法
5日前
シブヤパッケージングシステム株式会社
物品移載装置
13日前
株式会社デンソー
作業装置および作業プログラム
13日前
株式会社不二越
通信端末装置及びロボット制御システム
26日前
不二空機株式会社
エアツール及びエアツールの使用方法
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ