TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025050443
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2023159240
出願日
2023-09-22
発明の名称
ロボット、ロボットの制御方法、プログラム、記録媒体、物品の製造方法、駆動装置、駆動装置の制御方法
出願人
キヤノン株式会社
代理人
弁理士法人近島国際特許事務所
主分類
B25J
19/00 20060101AFI20250327BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ともに発熱体であるモータとモータ制御装置が、ロボットの筐体内部に比較的近接して設置されていても、モータとモータ制御装置の熱が適切に放熱され、ロボットを安定して動作させ得る技術が求められていた。
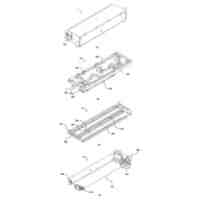
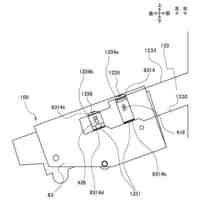
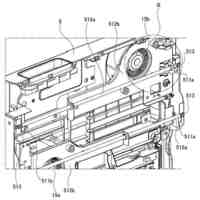
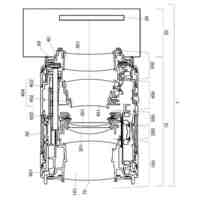
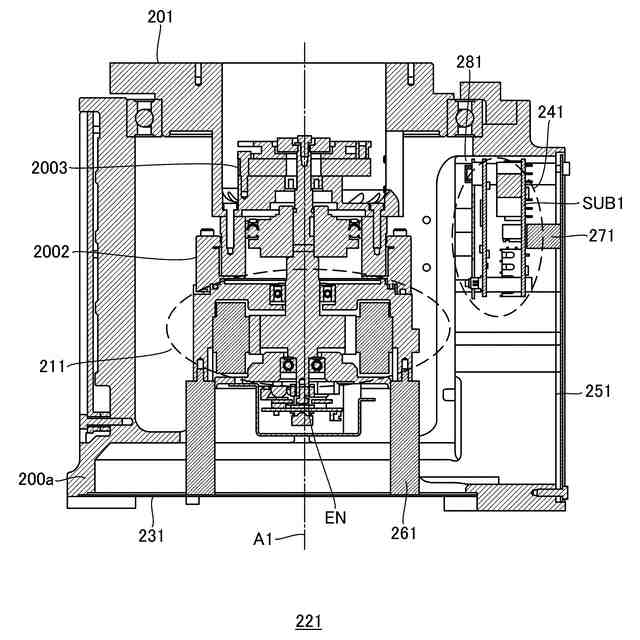
【解決手段】第1リンクと第2リンクと、前記第2リンクを前記第1リンクに対して変位させるモータと、前記モータを制御するモータ制御部と、第1放熱部材と、第2放熱部材と、前記モータ制御部と前記第1放熱部材とを接続する第1熱伝導部材と、前記モータと前記第2放熱部材とを接続する第2熱伝導部材と、を備え、前記第1熱伝導部材と前記第2熱伝導部材は離間し、前記第1放熱部材と前記第2放熱部材は離間している、ことを特徴とするロボットである。
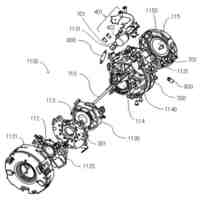
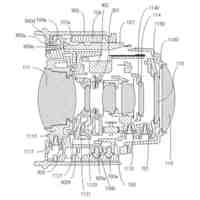
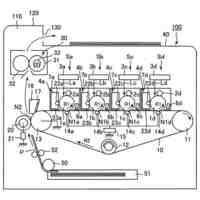
【選択図】図4
特許請求の範囲
【請求項1】
第1リンクと第2リンクと、
前記第2リンクを前記第1リンクに対して変位させるモータと、
前記モータを制御するモータ制御部と、
第1放熱部材と、
第2放熱部材と、
前記モータ制御部と前記第1放熱部材とを接続する第1熱伝導部材と、
前記モータと前記第2放熱部材とを接続する第2熱伝導部材と、を備え、
前記第1熱伝導部材と前記第2熱伝導部材は離間し、前記第1放熱部材と前記第2放熱部材は離間している、
ことを特徴とするロボット。
続きを表示(約 890 文字)
【請求項2】
前記モータ制御部は、低熱伝導率の部材である固定ブラケットを介して前記第1リンクに固定されている、
ことを特徴とする請求項1に記載のロボット。
【請求項3】
前記モータ制御部は、固定ブラケットを介して前記第1リンクに固定されており、前記モータ制御部と前記固定ブラケットの間には、低熱伝導率の部材が介在している、
ことを特徴とする請求項1に記載のロボット。
【請求項4】
前記モータ制御部は、固定ブラケットを介して前記第1リンクに固定されており、前記固定ブラケットと前記第1リンクの間には、低熱伝導率の部材が介在している、
ことを特徴とする請求項1に記載のロボット。
【請求項5】
前記第1放熱部材と前記第2放熱部材の間に、低熱伝導率の部材が配置されている、
ことを特徴とする請求項1に記載のロボット。
【請求項6】
前記第1放熱部材は、前記第1リンクに低熱伝導率の部材を介して固定されている、
ことを特徴とする請求項1に記載のロボット。
【請求項7】
前記第2放熱部材は、前記第1リンクに低熱伝導率の部材を介して固定されている、
ことを特徴とする請求項1に記載のロボット。
【請求項8】
前記低熱伝導率の部材は、樹脂製部材またはセラミック製部材である、
ことを特徴とする請求項2乃至7のいずれか1項に記載のロボット。
【請求項9】
前記モータ制御部は、制御回路が実装された基板を備え、
電気的には絶縁性の熱伝導シートを挟んで前記基板と前記第1熱伝導部材が面接触している、
ことを特徴とする請求項1乃至7のいずれか1項に記載のロボット。
【請求項10】
前記第1放熱部材と前記第2放熱部材の少なくとも一方は、外面に凹凸形状やフィン形状を備えている、
ことを特徴とする請求項1乃至7のいずれか1項に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット等における放熱に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
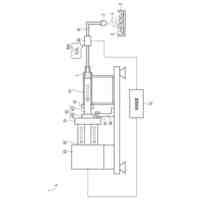
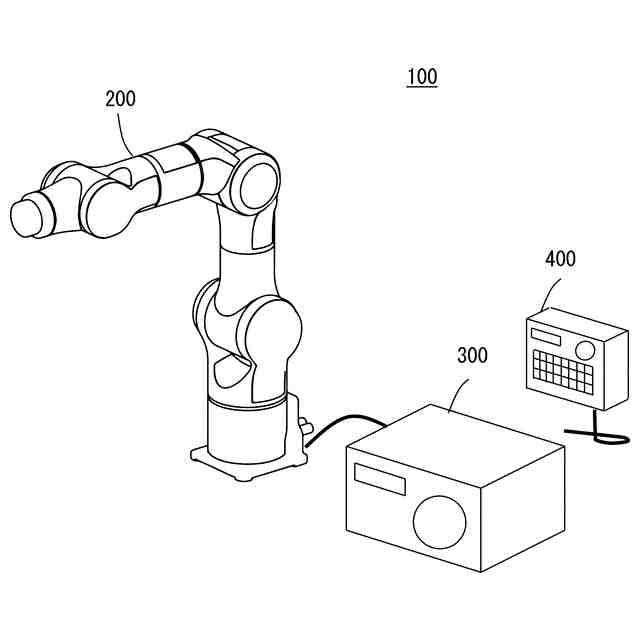
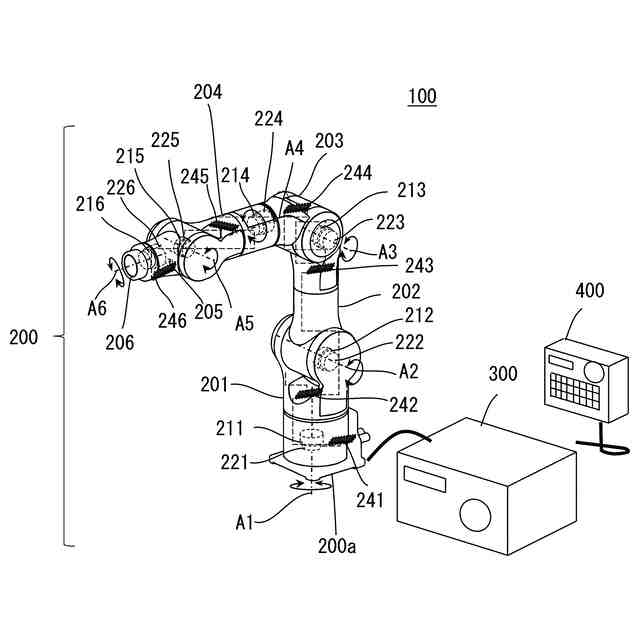
近年、ロボットの用途が拡大しており、人間との協働作業や、工場内の組み立て作業など、種々の動作が要求される分野、例えば多関節型ロボットの応用が広がっている。このようなロボットでは、ロボットコントローラとモータ制御装置とが通信線等で接続され、ロボットコントローラから送信される制御指令に応じてモータ制御装置がモータの制御を行う制御システムが用いられ得る。
【0003】
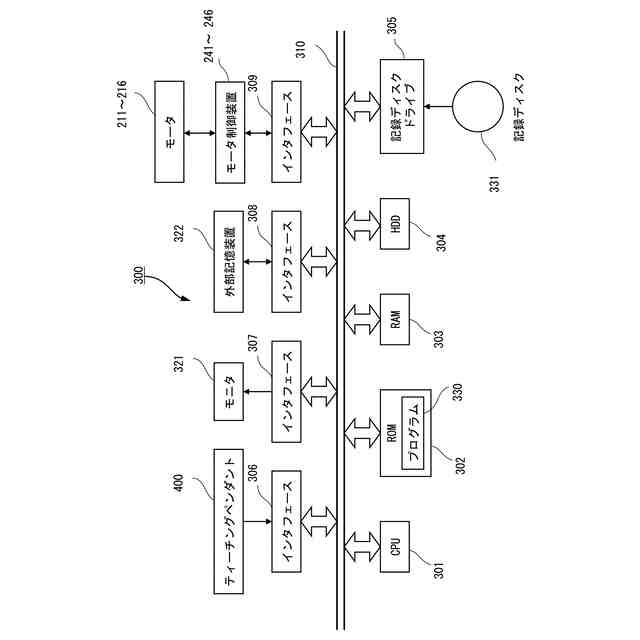
一般に、係るロボットにおいては、電源部から供給される直流電流をモータ制御装置内部のインバータ回路が交流電流へと変換し、この交流電流により各関節に設けられた交流モータを駆動することが行われる。交流モータを駆動させる際には、交流モータ自身が発熱するだけでなく、関節にかかる負荷に応じてインバータ回路内に大きな電流が流れてモータ制御装置内の回路が発熱する。
【0004】
特許文献1には、ロボットアームにおいて、交流モータを駆動するための駆動回路が搭載された基板を、ロボットアームの筐体に面接触させる構成が記載されている。
【0005】
特許文献2には、ロボットの筐体内部の発熱部品から放熱させる方法として、発熱部品を一つの熱伝導性ブラケットに固定し、ブラケットに対して2つのヒートシンクを接触させて2つの放熱経路を介して放熱する方法が記載されている。
【先行技術文献】
【特許文献】
【0006】
特開2020-25999号公報
特表2022-521440号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
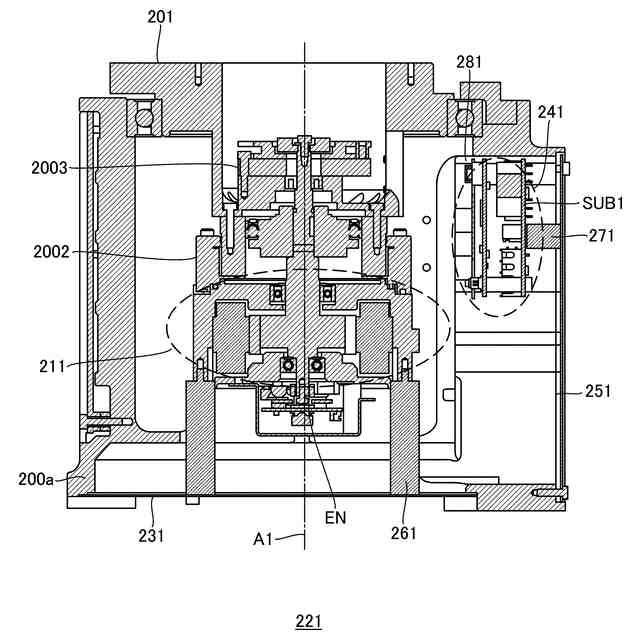
ロボットの関節部においては、筐体内部の狭い空間に、ともに発熱体であるモータとモータ制御装置が比較的近接して設置される。従来提案されている放熱方法では、一つの発熱体からの放熱経路については検討されているが、モータとモータ制御装置のように比較的近接して設置される2つの発熱体からの放熱方法については、十分に検討されていなかった。
【0008】
ともに発熱体であるモータとモータ制御装置は、耐熱性については同等でない場合が多く、許容される最高温度は互いに異なるのが一般的である。特に、モータ制御装置の温度が過度に上昇すると、制御装置内の電気回路が誤動作して、モータを正常に駆動制御することができなくなると、ロボットが正常に動作しなくなる。例えば、モータ制御装置が異常動作をしてモータの駆動制御に正帰還がかかると、最悪の場合には、モータが暴走してロボット自身や周囲の物品が破壊される可能性がある。
【0009】
そこで、ともに発熱体であるモータとモータ制御装置が、ロボットの筐体内部に比較的近接して設置されていても、モータとモータ制御装置の熱を適切に放熱させ得る技術が求められていた。
【課題を解決するための手段】
【0010】
本発明の第1の態様は、第1リンクと第2リンクと、前記第2リンクを前記第1リンクに対して変位させるモータと、前記モータを制御するモータ制御部と、第1放熱部材と、第2放熱部材と、前記モータ制御部と前記第1放熱部材とを接続する第1熱伝導部材と、前記モータと前記第2放熱部材とを接続する第2熱伝導部材と、を備え、前記第1熱伝導部材と前記第2熱伝導部材は離間し、前記第1放熱部材と前記第2放熱部材は離間している、ことを特徴とするロボットである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
5日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
光学機器
4日前
キヤノン株式会社
通信装置
3日前
キヤノン株式会社
光学機器
3日前
キヤノン株式会社
光学機器
3日前
キヤノン株式会社
光電変換装置
3日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
情報処理装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
画像形成装置
2日前
キヤノン株式会社
電子部品および機器
3日前
キヤノン株式会社
制御装置および制御方法
2日前
キヤノン株式会社
ズームレンズ及び撮像装置
3日前
キヤノン株式会社
TDC装置および測距装置
2日前
キヤノン株式会社
情報提供システム、及び方法
3日前
キヤノン株式会社
画像読取装置、画像形成装置
2日前
キヤノン株式会社
ズームレンズおよび撮像装置
2日前
キヤノン株式会社
検査装置、検査装置の制御方法
4日前
キヤノン株式会社
画像形成装置及びカートリッジ
2日前
キヤノン株式会社
細胞剥離装置及び細胞剥離方法
2日前
キヤノン株式会社
シート給送装置及び画像形成装置
2日前
キヤノン株式会社
撮像装置、及び撮像装置の設定方法
2日前
キヤノン株式会社
情報処理装置、方法、及びプログラム
3日前
キヤノン株式会社
情報処理装置、制御方法、プログラム
2日前
キヤノン株式会社
レンズ鏡筒、交換レンズ、及び撮像装置
3日前
キヤノン株式会社
決定方法、情報処理装置及びプログラム
2日前
キヤノン株式会社
情報処理装置、制御方法及びプログラム
2日前
キヤノン株式会社
印刷装置、その制御方法及びプログラム
2日前
キヤノン株式会社
システム、制御方法、およびプログラム
2日前
キヤノン株式会社
管理システム、管理方法およびプログラム
2日前
キヤノン株式会社
レンズ駆動機構、レンズ装置及び撮像装置
3日前
キヤノン株式会社
管理システム、管理方法およびプログラム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ