TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025018702
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023122653
出願日
2023-07-27
発明の名称
締め付け工具
出願人
日本車輌製造株式会社
代理人
個人
主分類
B25B
23/15 20060101AFI20250130BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】鋼材の連結作業の効率化を図ること。
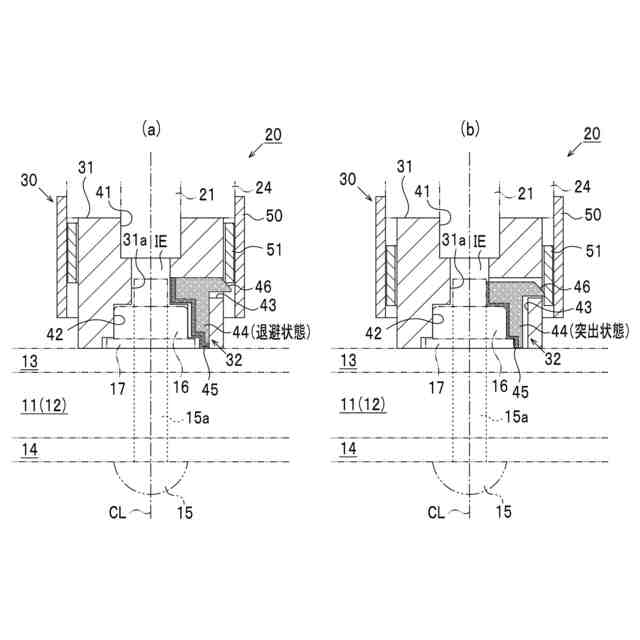
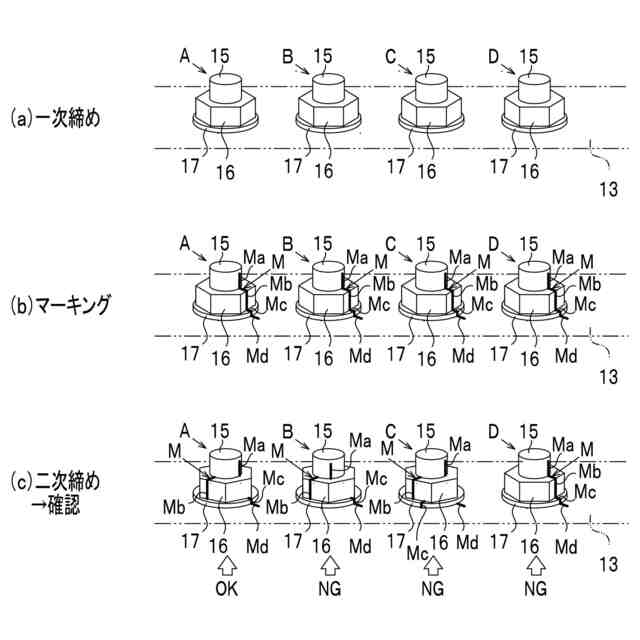
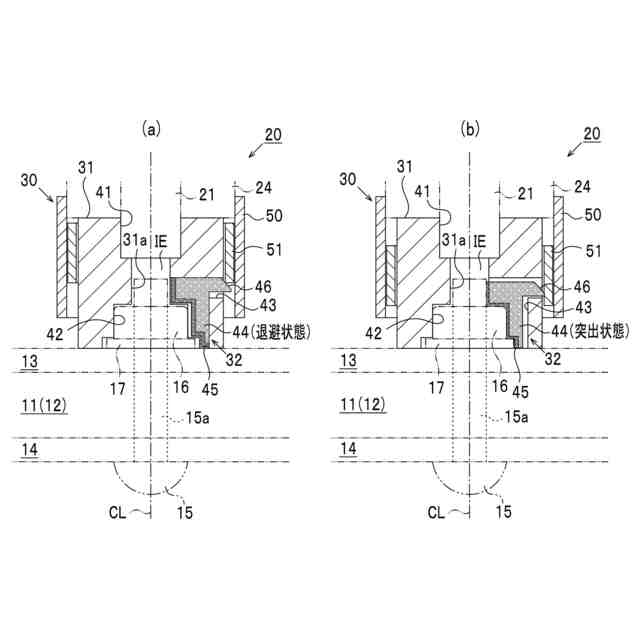
【解決手段】鋼橋の施工現場において高力ボルト15及びナット16の一次締めに使用されるインパクトレンチ20には、ナット16に係合可能なソケット31を有するアタッチメント30が装着されている。ソケット31は、インパクトレンチ20に設けられたトリガがユーザによってON操作されることで回転する。アタッチメント30は、高力ボルト15、ナット16、座金17及び添接板13にマーキングを施すマーキング機構32を備えている。このマーキング機構32は、一次締めに際して締め付けトルクが第1規定値に達した後に作動する。
【選択図】図4
特許請求の範囲
【請求項1】
ナットに係合可能なソケットが装着され、ユーザによる所定の操作に基づいて前記ソケットを回動させる駆動部を有し、前記ナット及び当該ナットに対応したボルトによって複数の鋼材を連結する連結作業に際し、それらナット及びボルトの一次締めに用いられる締め付け工具であって、
前記所定の操作に基づいて前記一次締めが完了した場合に、前記ナットと前記ボルトの軸部及び前記鋼材の少なくとも何れかとを含む複数の対象に自動的にマーキングを行うマーキング機構を備えている締め付け工具。
続きを表示(約 130 文字)
【請求項2】
前記ソケットの側面に溝が設けられ、当該溝に沿って前記マーキングを行う請求項1に記載の締め付け工具。
【請求項3】
前記一次締めが完了している前記ナットに対しては前記マーキングを行わない請求項1又は請求項2に記載の締め付け工具。
発明の詳細な説明
【技術分野】
【0001】
本発明は、締め付け工具に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
鋼橋の施工現場等においては、複数の鋼材を締結具(ボルト、座金、ナット)を用いて連結する連結作業が行われる。この連結作業では、締結具を本締めする前に、所定の締め付けトルクとなるようにして一次締めを行った後、ペン等を用いてボルト、座金、ナット、鋼材にマーキングを施すことが一般的である。本締め後は、マーキングを目視することにより、締め忘れや供回り等が発生していないか確認できる。近年では、マーキングに際して締結具に被せるキャップ型の補助具を用いる技術が提案されており(例えば、特許文献1参照)、マーキングの効率化、ひいては連結作業の効率化が図られている。
【先行技術文献】
【特許文献】
【0003】
特開2004-108565号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、複数の鋼材を連結する場合には、鋼材のサイズが大きくなることで必要となる締結具の数が嵩むこととなる。例えば鋼橋では1橋につき数千~数万の締結具が用いられることがある。上述したようなマーキング用の補助具を用いたとしても、補助具の着脱を繰り返す必要があるため、依然として連結作業(特にマーキング)に多大な時間を要することとなる。このように、一次締め後のマーキングについては、連結作業の効率化を図る上で未だ改善の余地がある。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、鋼材の連結作業の効率化を図ることにある。
【課題を解決するための手段】
【0006】
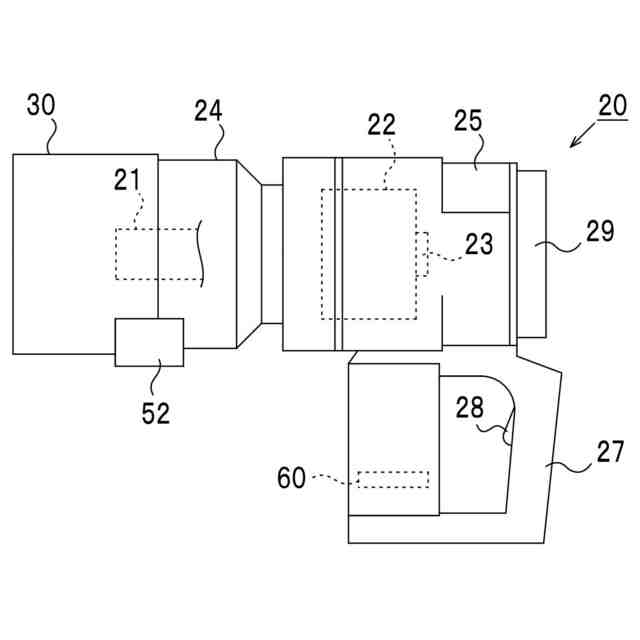
本発明は、ナット(ナット16)に係合可能なソケット(ソケット31)が装着され、ユーザによる所定の操作(トリガ28のON操作)に基づいて前記ソケットを回動させる駆動部(モータ22)を有し、前記ナット及び当該ナットに対応したボルト(高力ボルト15)によって複数の鋼材(橋桁11~12、添接板13~14)を連結する連結作業に際し、それらナット及びボルトの一次締めに用いられる締め付け工具(インパクトレンチ20)であって、前記所定の操作に基づいて前記一次締めが完了した場合に、前記ナットと前記ボルトの軸部及び前記鋼材の少なくとも何れかとを含む複数の対象に自動的にマーキングを行うマーキング機構(マーキング機構32)を備えている。
【発明の効果】
【0007】
本発明によれば、一次締め後は締め付け工具によってマーキングがなされる。このような構成とすれば、工具を持ち替えることなく、一次締め及びマーキングの両方を行うことができる。故に、マーキングに係る作業時間や準備時間を短縮し、鋼材の連結作業における作業効率を向上させることが可能である。
【図面の簡単な説明】
【0008】
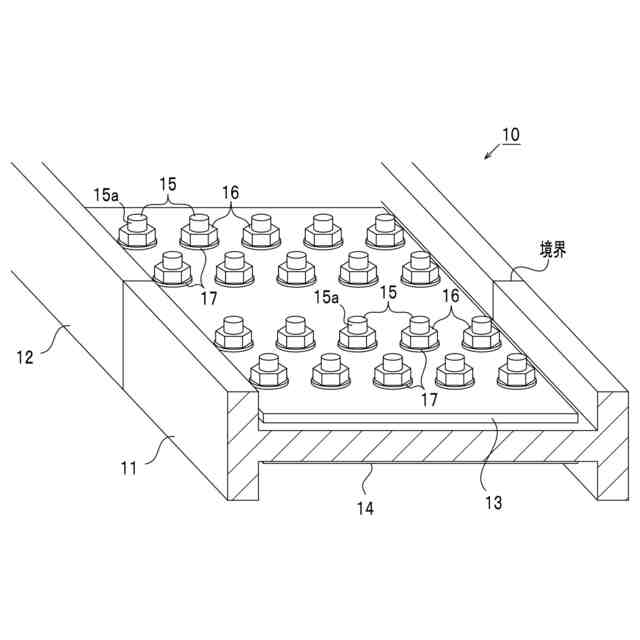
第1の実施形態における橋桁の連結構造を示す斜視図。
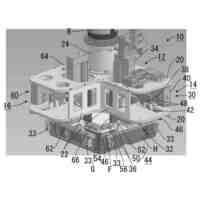
連結作業の流れを示す概略図。
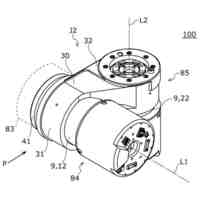
インパクトレンチの側面図。
アタッチメントの構造を示す断面図。
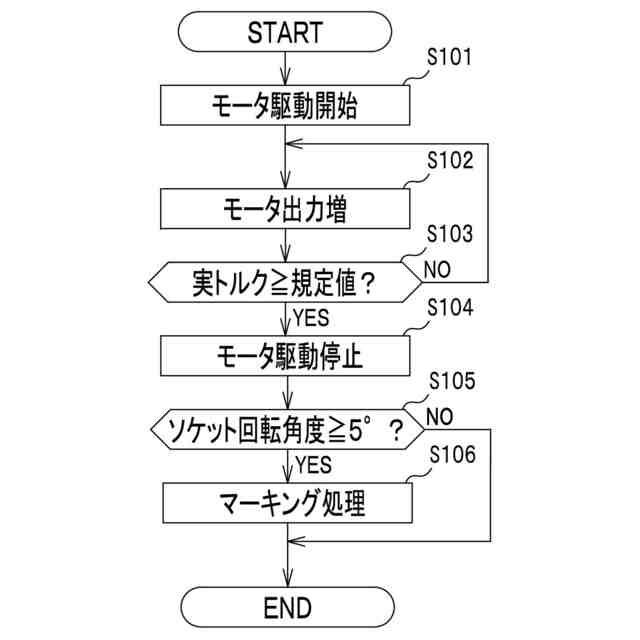
一次締め用の制御処理を示すフローチャート。
第2の実施形態におけるアタッチメントの横断面を示す概略図。
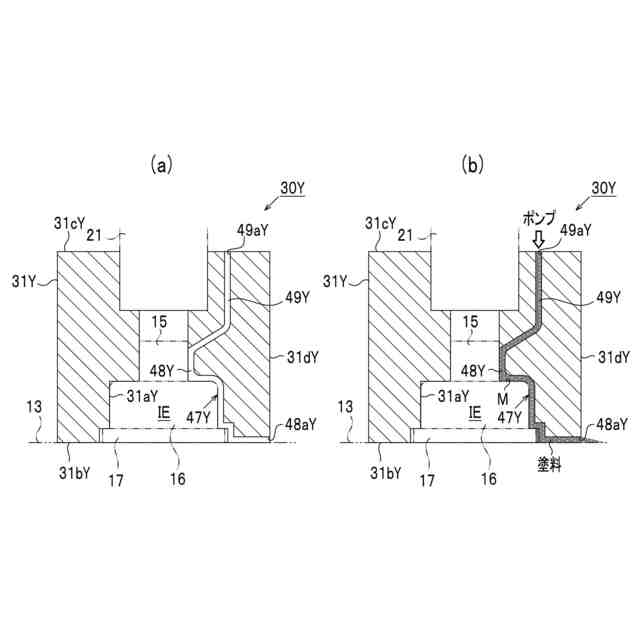
第3の実施形態におけるアタッチメントの縦断面を示す概略図。
【発明を実施するための形態】
【0009】
<第1の実施形態>
以下、鋼橋の施工現場等にて使用されるインパクトレンチに具体化した第1の実施形態について図面を参照しつつ説明する。先ず図1を参照して、鋼橋10の連結構造について説明する。
【0010】
鋼橋10の連結構造は、一連となるようにして配列された複数の橋桁(橋桁11,12)と、それら橋桁の境界部分を挟むようにして配設された添接板(添接板13,14)とを有してなり、それら橋桁11,12及び添接板13,14(以下、橋桁11,12及び添接板13,14を「鋼材」ともいう)が締結具(高力ボルト15、ナット16、座金17)を用いて連結されてなる。具体的には、橋桁11,12及び添接板13,14には、鋼材同士の重なり方向に連通するようにしてボルト孔が形成されている。それらボルト孔には添接板14側(図1の下側)から高力ボルト15が挿通されており、高力ボルト15の軸部15aが添接板13から突出している。この突出部分にナット16及び座金17が取り付けられており、鋼材を高力ボルト15及びナット16で締め付けることで、添接板13,14を介して橋桁11,12が連結されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
24日前
株式会社クレスコ
補助吸着具
17日前
株式会社不二越
ロボット
9日前
個人
深孔スリーブ駆動ロッド構造
1か月前
株式会社エビス
腰ベルト用連結具
24日前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ロボット
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社デンソー
操縦桿
1か月前
株式会社イノウ
給油口キャップ用開閉具
10日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
川崎重工業株式会社
制動システム
9日前
住友重機械工業株式会社
ロボット
3日前
株式会社不二越
垂直多関節ロボット
10日前
ARMA株式会社
UI付エンドエフェクタ
1か月前
芝浦機械株式会社
双腕ロボット
2日前
アイホン株式会社
ネジ締めカウントシステム
11日前
パナソニック株式会社
工具
10日前
パナソニック株式会社
工具
10日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
学校法人法政大学
装着型アシスト装置
1か月前
アピュアン株式会社
エアー式衝撃工具
27日前
住友重機械工業株式会社
ロボット及びカバー
3日前
株式会社マキタ
作業機
1か月前
三菱電機株式会社
トルク締め個所検出システム
1か月前
住友重機械工業株式会社
アクチュエータ支持部材
2日前
智頭電機株式会社
箱体把持装置、および、箱体把持方法
3日前
株式会社マキタ
打ち込み工具
11日前
株式会社マキタ
インパクト工具
25日前
株式会社マキタ
インパクト工具
25日前
高丸工業株式会社
ロボット操作システムの動作方法
1か月前
SB C&S株式会社
治具セット
24日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
中国電力株式会社
電動ドライバー
1か月前
株式会社不二越
ロボットの教示システム及び教示方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ