TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029455
公報種別
公開特許公報(A)
公開日
2025-03-06
出願番号
2023134127
出願日
2023-08-21
発明の名称
ロボットシステム、ブレーキ判定方法、および、ブレーキ判定プログラム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20250227BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】電磁ブレーキの異常を精度よく判定することが可能なロボットシステム、ブレーキ判定方法、および、ブレーキ判定プログラムを提供する。
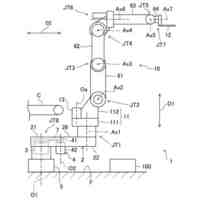
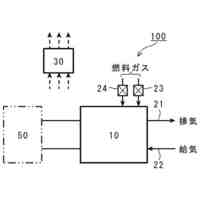
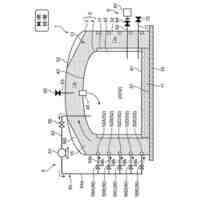
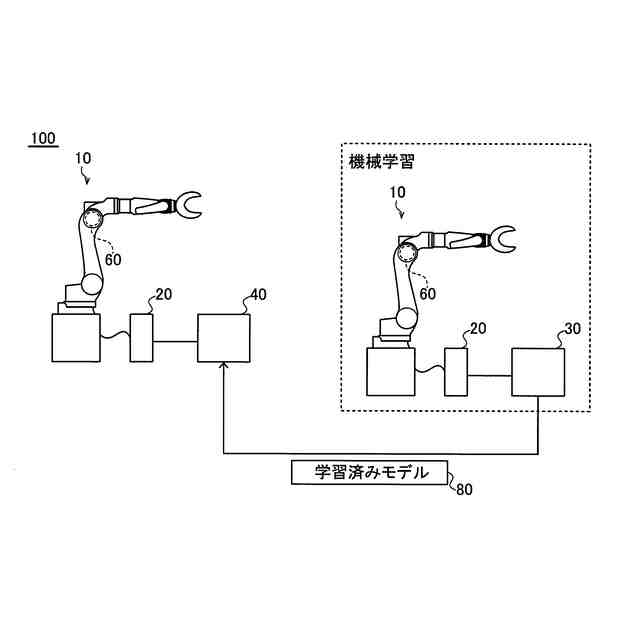
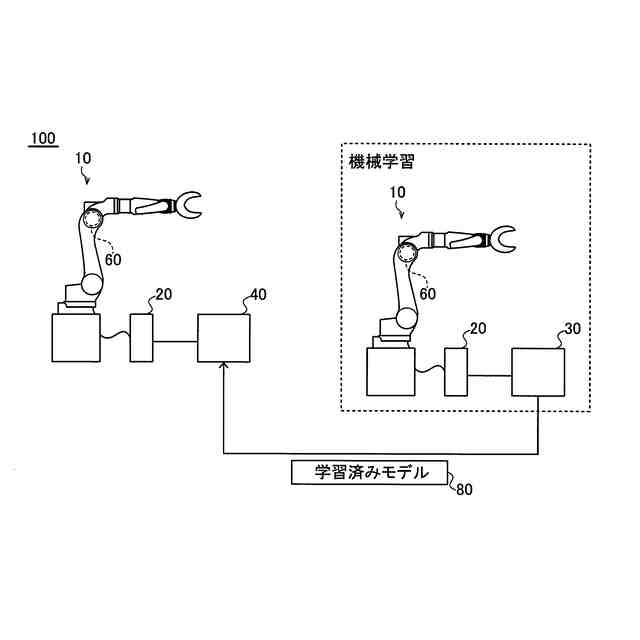
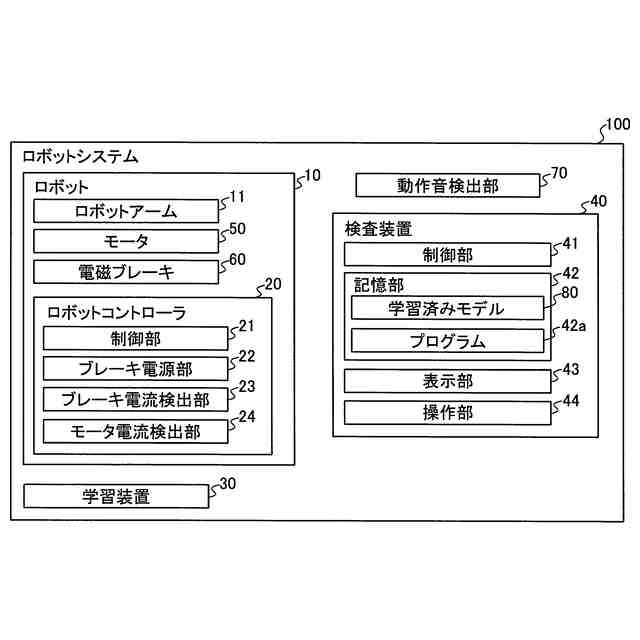
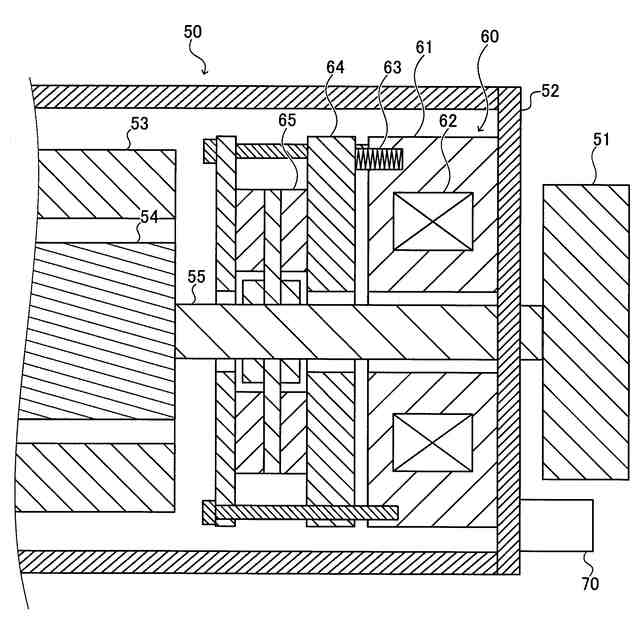
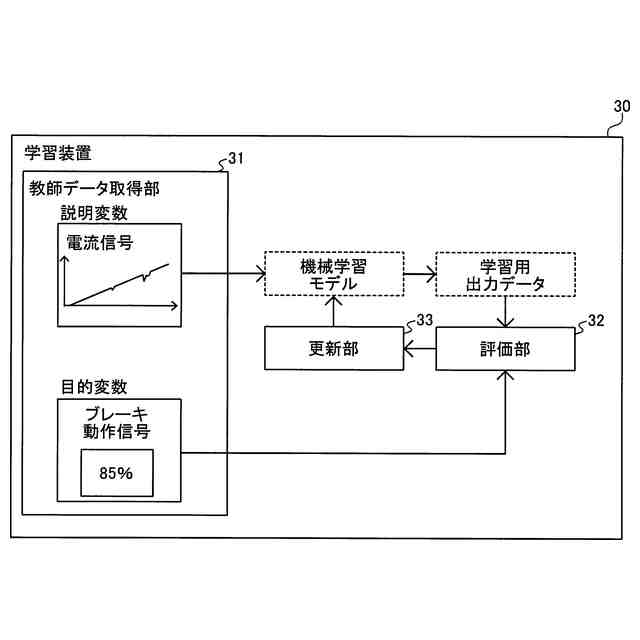
【解決手段】このロボットシステム100は、ロボット10の駆動源となるモータの回転に対するブレーキがオンになる制動状態と、オフになる解放状態とを切り替える電磁ブレーキ60と、電磁ブレーキ60に流れる電流を検出するブレーキ電流検出部と、制御部とを備える。制御部は、ブレーキ電流検出部による検出結果に基づく電流信号を教師データの説明変数とし、電磁ブレーキの切替動作の切替タイミングを示すブレーキ動作信号を教師データの目的変数として、機械学習により生成された学習済みモデル80を用いることによって、電流信号に対する学習済みモデル80からの予測値の出力として、推定ブレーキ動作信号を取得する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットの駆動源となるモータの回転に対するブレーキがオンになる制動状態と、オフになる解放状態とを切り替える電磁ブレーキと、
前記電磁ブレーキに流れる電流を検出するブレーキ電流検出部と、
前記ブレーキ電流検出部による検出結果に基づく電流信号を教師データの説明変数とし、前記電磁ブレーキの前記制動状態と前記解放状態とが切り替えられる切替動作の切替タイミングを示すブレーキ動作信号を教師データの目的変数として、機械学習により生成された学習済みモデルを用いることによって、前記電流信号に対する前記学習済みモデルからの予測値の出力として、推定された前記ブレーキ動作信号である推定ブレーキ動作信号を取得する制御部と、を備える、ロボットシステム。
続きを表示(約 1,400 文字)
【請求項2】
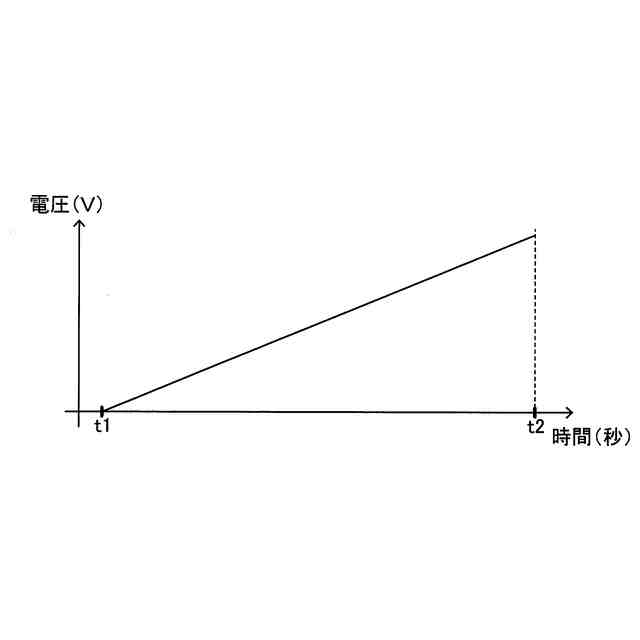
前記電磁ブレーキに対して徐々に大きさが変化する電圧を印加するブレーキ電源部をさらに備え、
前記制御部は、
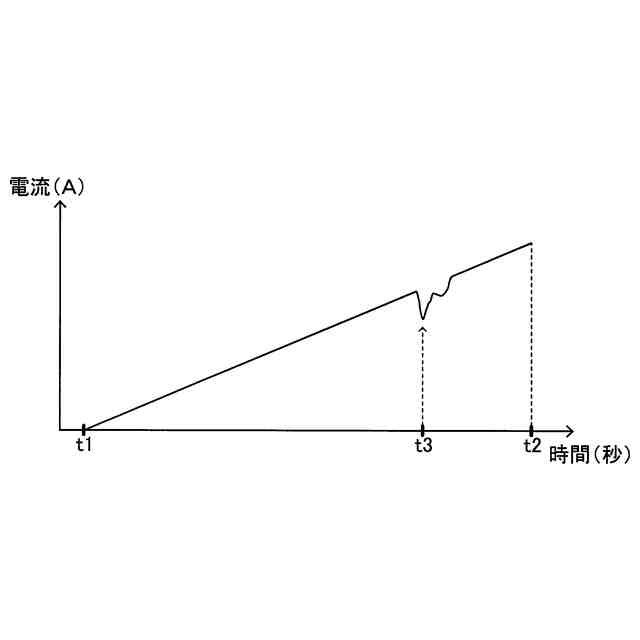
前記ブレーキ電源部により徐々に大きさが変化する電圧が印加されることにより前記電磁ブレーキに流れる電流の検出結果に基づく前記電流信号を取得し、
取得された前記電流信号に対する前記学習済みモデルからの予測値の出力として前記推定ブレーキ動作信号を取得する、請求項1に記載のロボットシステム。
【請求項3】
前記制御部は、取得された前記推定ブレーキ動作信号に基づいて、前記切替動作の切替タイミングにおいて前記電磁ブレーキに印加されているブレーキ駆動電圧を取得する、請求項1または2に記載のロボットシステム。
【請求項4】
前記切替動作の切替タイミングを検出する動作検出部と、
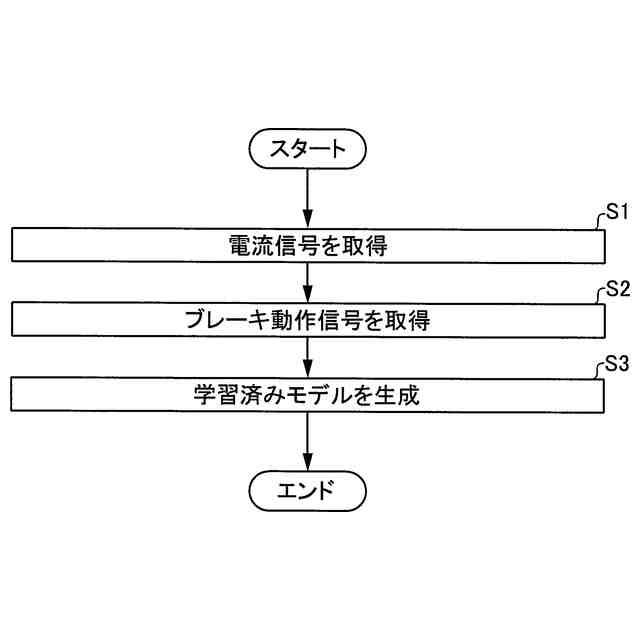
前記電流信号を前記説明変数として取得するとともに、前記動作検出部により検出された前記切替動作の状態を示す前記ブレーキ動作信号を前記目的変数として取得することによって、前記説明変数と前記目的変数とを用いた機械学習により前記学習済みモデルを生成する学習部とを、さらに備える、請求項1または2に記載のロボットシステム。
【請求項5】
前記動作検出部は、前記切替動作の切替タイミングを検出するために前記切替動作における動作音を検出する動作音検出部を含み、
前記学習部は、前記動作音検出部により検出された検出信号に基づく前記目的変数としての前記ブレーキ動作信号を取得する、請求項4に記載のロボットシステム。
【請求項6】
前記動作検出部は、前記切替動作の切替タイミングを検出するために前記切替動作における振動を検出する振動検出部を含み、
前記学習部は、前記振動検出部により検出された検出信号に基づく前記目的変数としての前記ブレーキ動作信号を取得する、請求項4に記載のロボットシステム。
【請求項7】
前記動作検出部は、前記切替動作の切替タイミングを検出するために前記モータに供給されるモータ駆動電流を検出し、
前記学習部は、前記モータ駆動電流に基づく前記目的変数としての前記ブレーキ動作信号を取得する、請求項4に記載のロボットシステム。
【請求項8】
前記動作検出部は、前記切替動作の切替タイミングを検出するために前記モータの回転を検出するエンコーダを含み、
前記学習部は、前記エンコーダからの出力に基づく前記目的変数としての前記ブレーキ動作信号を取得する、請求項4に記載のロボットシステム。
【請求項9】
前記制御部は、前記学習済みモデルからの予測値の出力として、前記切替動作において前記ブレーキ電源部により印加される電圧の変化が開始された時点から、前記電磁ブレーキの前記制動状態と前記解放状態とが切り替えられた切替タイミングの時点までの時間を表す前記推定ブレーキ動作信号を取得する、請求項2に記載のロボットシステム。
【請求項10】
前記制御部は、前記ブレーキ電流検出部により検出された電流の交流成分が抽出された前記電流信号を前記説明変数として機械学習により生成された前記学習済みモデルを用いることによって、前記電流信号に対する前記学習済みモデルからの予測値の出力として前記推定ブレーキ動作信号を取得する、請求項1または2に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットシステム、ブレーキ判定方法、および、ブレーキ判定プログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、ブレーキ装置を備えるモータ駆動装置が知られている。たとえば、特許文献1では、摩擦式のブレーキ装置を備えるモータ駆動装置が記載されている。このブレーキ装置では、ブレーキコイルにブレーキコイル電圧を印加することにより生じる電磁力によって、アーマチュアが摩擦板から引き離されてモータのブレーキが解除される。また、特許文献1に記載のモータ駆動装置では、ブレーキ装置においてブレーキが正常に解除されているか否かが判定される。具体的には、ブレーキコイル電圧を印加した状態において、所定負荷にてモータを運転した時のモータ電流を観測し、予め設定されているブレーキ正常解除時電流との大小関係に基づいてブレーキが正常に解除されているか否かが判定される。特許文献1に記載のモータ駆動装置では、モータ電流がブレーキ正常解除時電流よりも大きい場合には、ブレーキが正常に解除されていないと判定されるとともに、ブレーキコイル電圧がより大きい値に変更される。
【先行技術文献】
【特許文献】
【0003】
特許第6227612号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1のモータ駆動装置のように、電流値などの検出された値が予め設定された所定のしきい値よりも大きいか否かを判定することによって電磁ブレーキであるブレーキの異常を判定する場合には、ノイズなどの外乱に起因して判定の精度が低下する。このため、電磁ブレーキの異常を精度よく判定することが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、電磁ブレーキの異常を精度よく判定することが可能なロボットシステム、ブレーキ判定方法、および、ブレーキ判定プログラムを提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面によるロボットシステムは、ロボットの駆動源となるモータの回転に対するブレーキがオンになる制動状態と、オフになる解放状態とを切り替える電磁ブレーキと、電磁ブレーキに流れる電流を検出するブレーキ電流検出部と、ブレーキ電流検出部による検出結果に基づく電流信号を教師データの説明変数とし、電磁ブレーキの制動状態と解放状態とが切り替えられる切替動作の切替タイミングを示すブレーキ動作信号を教師データの目的変数として、機械学習により生成された学習済みモデルを用いることによって、電流信号に対する学習済みモデルからの予測値の出力として、推定されたブレーキ動作信号である推定ブレーキ動作信号を取得する制御部と、を備える。
【0007】
この開示の第1の局面によるロボットシステムは、上記のように、ブレーキ電流検出部による検出結果に基づく電流信号を教師データの説明変数とし、電磁ブレーキの制動状態と解放状態とが切り替えられる切替動作の切替タイミングを示すブレーキ動作信号を教師データの目的変数として、機械学習により生成された学習済みモデルを用いることによって、電流信号に対する学習済みモデルからの予測値の出力として、推定されたブレーキ動作信号である推定ブレーキ動作信号を取得する制御部を備える。これにより、機械学習により生成された学習済みモデルからの予測値の出力として推定ブレーキ動作信号が取得されるため、電磁ブレーキの切替動作による電流信号の変化とノイズなどの外乱による電流信号の変化とを精度よく区別できる。そのため、電流信号の変化の量、または、電流信号の変化の量の微分値を予め設定されたしきい値と比較することによってブレーキの切替動作を予測する場合に比べて、電磁ブレーキの切替動作の切替タイミングを精度よく予測できる。その結果、予測された切替タイミングに基づいて電磁ブレーキが正常に動作しているか否かを判定できるため、電磁ブレーキの異常を精度よく判定できる。なお、ここで言う「電磁ブレーキの異常の判定」とは、電磁ブレーキにおける各部の劣化や動作の不具合などの異常が発生しているか否かの判定のみならず、異常が発生しているとまでは至らないものの劣化が進行している進行度合いの判定や、将来的に異常が生じる寿命予測の判定などをも含む広い概念として記載している。
【0008】
この開示の第2の局面によるブレーキ判定方法は、ロボットの駆動源となるモータの回転に対するブレーキがオンになる制動状態と、オフになる解放状態とを切り替える電磁ブレーキに流れる電流の検出結果に基づく電流信号を取得し、電流信号を教師データの説明変数とし、電磁ブレーキの制動状態と解放状態とが切り替えられる切替動作の切替タイミングを示すブレーキ動作信号を教師データの目的変数として、機械学習により生成された学習済みモデルを用いることによって、取得された電流信号に対する学習済みモデルからの予測値の出力として、推定されたブレーキ動作信号である推定ブレーキ動作信号を取得する。
【0009】
この開示の第2の局面によるブレーキ判定方法は、上記のように、電流信号を教師データの説明変数とし、電磁ブレーキの制動状態と解放状態とが切り替えられる切替動作の切替タイミングを示すブレーキ動作信号を教師データの目的変数として、機械学習により生成された学習済みモデルを用いることによって、取得された電流信号に対する学習済みモデルからの予測値の出力として、推定されたブレーキ動作信号である推定ブレーキ動作信号を取得する。これにより、機械学習により生成された学習済みモデルからの予測値の出力として推定ブレーキ動作信号が取得されるため、電磁ブレーキの切替動作による電流信号の変化とノイズなどの外乱による電流信号の変化とを精度よく区別できる。そのため、電流信号の変化の量または、電流信号の変化の量の微分値を予め設定されたしきい値と比較することによってブレーキの切替動作を予測する場合に比べて、電磁ブレーキの切替動作の切替タイミングを精度よく予測できる。その結果、予測された切替タイミングに基づいて電磁ブレーキが正常に動作しているか否かを判定できるため、電磁ブレーキの異常を精度よく判定可能なブレーキ判定方法を提供できる。
【0010】
この開示の第3の局面によるブレーキ判定プログラムは、第2の局面によるブレーキ判定方法をコンピュータに実行させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
弁装置
25日前
川崎重工業株式会社
舵取機
25日前
川崎重工業株式会社
バーナ
25日前
川崎重工業株式会社
液圧駆動装置
25日前
川崎重工業株式会社
液圧駆動装置
25日前
川崎重工業株式会社
多関節ロボット
17日前
川崎重工業株式会社
多関節ロボット
17日前
川崎重工業株式会社
液化ガス運搬船
21日前
川崎重工業株式会社
ロボットシステム
24日前
川崎重工業株式会社
バーナ及び燃焼炉
18日前
川崎重工業株式会社
マルチコントロールバルブ
25日前
川崎重工業株式会社
マルチコントロールバルブ
25日前
川崎重工業株式会社
マルチコントロールバルブ
25日前
川崎重工業株式会社
三重殻タンクのパージ方法
3日前
川崎重工業株式会社
計測装置、推定装置、及び計測方法
24日前
川崎重工業株式会社
液圧駆動システム、及びマルチコントロール弁
17日前
川崎重工業株式会社
制御装置、ガスエンジンシステムおよび制御方法
25日前
川崎重工業株式会社
バイオガス化施設と炭化燃料化施設を備える複合施設
3日前
川崎重工業株式会社
液化ガス貯蔵タンクの運用方法及び液化ガス貯蔵タンク
24日前
川崎重工業株式会社
基板搬送ロボット、および、基板搬送ロボットの制御方法
17日前
株式会社ビードットメディカル
患者搬送台車及び放射線照射システム
17日前
川崎重工業株式会社
診断/治療支援ロボット
12日前
川崎重工業株式会社
ロボットシステム、ブレーキ判定方法、および、ブレーキ判定プログラム
4日前
川崎重工業株式会社
ロボットシステム及びロボットの制御方法
24日前
川崎重工業株式会社
仲介装置、それを用いた仲介方法及びプログラム
19日前
川崎重工業株式会社
ワーク搬送方法、ワーク搬送装置およびワーク搬送プログラム
12日前
個人
腰袋
24日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
3か月前
国立大学法人金沢大学
ロボット
3日前
株式会社マキタ
電動工具
17日前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
電動工具
3か月前
株式会社マキタ
打撃工具
3か月前
株式会社ダイヘン
搬送装置
4か月前
川崎重工業株式会社
ロボットリスト
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ