TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025025305
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129960
出願日
2023-08-09
発明の名称
多関節ロボット
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
9/06 20060101AFI20250214BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多関節ロボットの旋回部周辺を省スペースにする。
【解決手段】多関節ロボット1は、複数の関節を有するロボットアーム10と、ロボットアーム10を支持する支持面26を有する旋回部2と、上下方向に延びる第1軸線O1に沿って支持面26の上方又は下方に位置し、旋回部2を第1軸線O1まわりに旋回させる減速機3と、第1軸線O1を水平方向にずらした第2軸線O2まわりに回転しかつ減速機3に連結されたシャフト41と、シャフト41を収容しかつ旋回部2に支持されたケース42とを有し、ケース42が、支持面26を基準にして、上下方向において減速機3と同じ側に位置するモータ4と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
複数の関節を有するロボットアームと、
前記ロボットアームを支持する支持面を有する旋回部と、
上下方向に延びる第1軸線に沿って前記支持面の上方又は下方に位置し、前記旋回部を前記第1軸線まわりに旋回させる減速機と、
前記第1軸線を水平方向にずらした第2軸線まわりに回転しかつ前記減速機に連結されたシャフトと、前記シャフトを収容しかつ前記旋回部に支持されたケースとを有し、前記ケースが、前記支持面を基準にして、上下方向において前記減速機と同じ側に位置するモータと、を備える、多関節ロボット。
続きを表示(約 530 文字)
【請求項2】
請求項1に記載された多関節ロボットにおいて、
前記減速機及び前記ケースは、前記支持面の下方に位置する、多関節ロボット。
【請求項3】
請求項2に記載された多関節ロボットにおいて、
前記旋回部は、上下方向に延びかつ前記ケースが通る貫通孔を有する、多関節ロボット。
【請求項4】
請求項1に記載された多関節ロボットにおいて、
前記シャフトを前記減速機に連結するベルトを備える、多関節ロボット。
【請求項5】
請求項1に記載された多関節ロボットにおいて、
前記旋回部は、
前記第1軸線に沿って前記減速機が位置する第1端と、
前記ロボットアームを支持する第2端と、を有し、
前記ロボットアームは、前記第1軸線及び前記第2軸線に平行な第1関節軸まわりに旋回し、
前記第2軸線は、前記水平方向において、前記第2端よりも前記第1端に近接する、多関節ロボット。
【請求項6】
請求項1から5のいずれか1項に記載された多関節ロボットにおいて、
前記ロボットアームは、7軸かつ垂直多関節式のロボットアームである、多関節ロボット。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、多関節ロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1は、多関節ロボットの一例を開示している。特許文献1に開示された多関節ロボットは、第一腕部と、第二腕部と、第三腕部と、旋回部と、アクチュエータと、を備えている。第一腕部、第二腕部及び第三腕部は、互いに直列に接続されている。旋回部は、第一腕部の基端部に接続されている。アクチュエータは、旋回部を、鉛直な軸線まわりに旋回させる。アクチュエータは、例えば電動機、減速機及びブレーキにより構成されている。
【先行技術文献】
【特許文献】
【0003】
特許第5975129号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1に開示されたような多関節ロボットの場合、旋回部の軸線付近にアクチュエータを配置することが考えられる。しかしながら、例えば鉛直な軸線上にアクチュエータを配置してしまうと、旋回部周辺の寸法が、他の場所にアクチェータを配置した場合に比して上下方向に長くなる可能性がある。寸法が長くなることは、旋回部周辺を省スペースにする上で不都合である。
【課題を解決するための手段】
【0005】
ここに開示する技術は、多関節ロボットに関する。前記多関節ロボットは、複数の関節を有するロボットアームと、前記ロボットアームを支持する支持面を有する旋回部と、上下方向に延びる第1軸線に沿って前記旋回部の上方又は下方に位置し、前記旋回部を前記第1軸線まわりに旋回させる減速機と、前記第1軸線を水平方向にずらした第2軸線まわりに回転しかつ前記減速機に連結されたシャフトと、前記シャフトを収容しかつ前記旋回部に支持されたケースとを有し、前記ケースが、前記支持面を基準にして、上下方向において前記減速機と同じ側に位置するモータと、を備える。
【発明の効果】
【0006】
前記多関節ロボットによれば、旋回部周辺を省スペースにすることができる。
【図面の簡単な説明】
【0007】
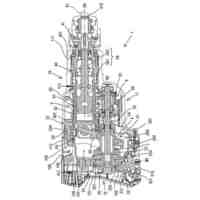
図1は、多関節ロボットの側面図である。
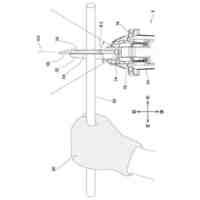
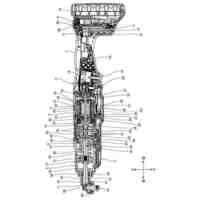
図2は、旋回部の縦断面図である。
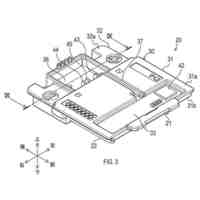
図3は、変形例に係る多関節ロボットの図1対応図である。
【発明を実施するための形態】
【0008】
以下、多関節ロボットの実施形態を説明する。以下の実施形態は例示である。
【0009】
(全体構成)
図1は、多関節ロボット1の側面図である。多関節ロボット1は、例えば物流分野に用いられる。具体的に、図1に例示する多関節ロボット1は、物品の積み降ろしに用いることができる。なお、多関節ロボット1の用途は、物流分野に限定されない。また、多関節ロボット1は、設置面F上に設置されている。言い換えると、設置面Fが、多関節ロボット1を下方から支持している。設置面Fは、物品の積み降ろし場、工場等の床面としてもよい。
【0010】
なお、以下の記載における上下方向とは、図1の両矢印D1に示すように、多関節ロボット1の高さ方向を指す。上下方向は、図1の紙面上での上下方向に相当する。同様に、以下の記載における水平方向とは、図1の両矢印D2に示すように、前記上下方向に直交する方向を指す。水平方向は、図1の紙面上での左右方向に相当する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
8日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
16日前
川崎重工業株式会社
ロボットアーム
16日前
日本車輌製造株式会社
締め付け工具
16日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットリスト
16日前
日本信号株式会社
作業機制御システム
1日前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
16日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
2日前
ジヤトコ株式会社
圧入装置
29日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
5日前
株式会社マキタ
集塵アタッチメント
1日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
16日前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
17日前
川崎重工業株式会社
ロボットシステム
8日前
個人
ターンバックル用工具
23日前
株式会社DailyColor
ロボットハンド
17日前
有限会社松尾エンジニアリング
連結部材
17日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
22日前
株式会社マキタ
電動工具
8日前
株式会社マキタ
作業機
29日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
バッテリ駆動式機器
1か月前
株式会社マキタ
電動作業機
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ