TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025004923
公報種別
公開特許公報(A)
公開日
2025-01-16
出願番号
2023104823
出願日
2023-06-27
発明の名称
経路決定システム及び方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20250108BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】機械学習を用いてロボットアームの大きな動作を抑制した経路決定システム及び方法を提供する。
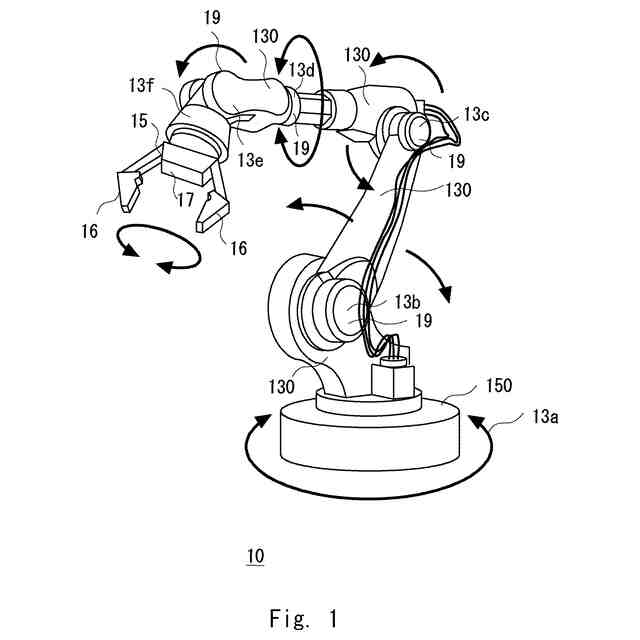
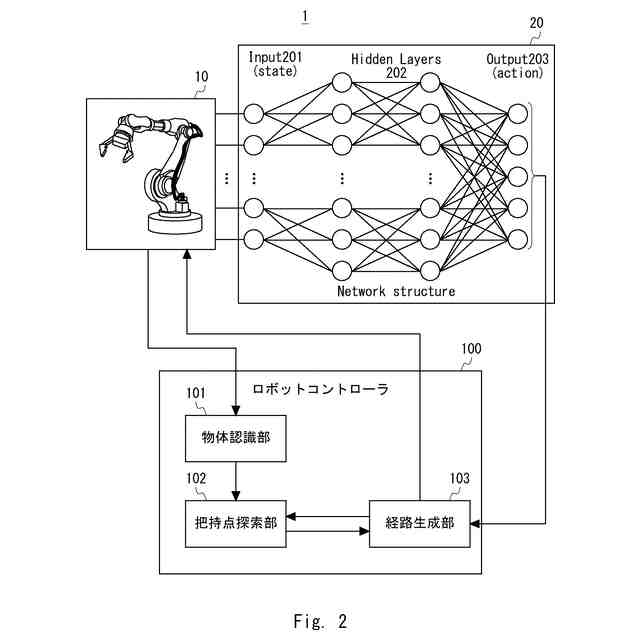
【解決手段】経路決定システム1は、ロボットアーム10に搭載され、物体を撮影するカメラ17と、ロボットアームの関節部に搭載され、関節部の角度データを取得するセンサと、ロボットアーム10の動作を制御するロボットコントローラ100と、ロボットアームの動作を最適化する深層強化学習モデル20と、を備える。ロボットコントローラは、カメラによる撮影画像から物体を認識し、認識された前記物体の把持点を探索し、ロボットアームの先端にある把持部を、探索された把持点まで移動させる経路を生成する。深層強化学習モデルは、生成された経路に沿って移動するロボットアームの所定の関節部の角度を入力し、所定の関節部の角度の変化量をできる限り小さくするようにロボットアームの経路を決定する。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットアームに搭載され、物体を撮影するカメラと、
前記ロボットアームの関節部に搭載され、関節部の角度データを取得するセンサと、
前記ロボットアームの動作を制御するロボットコントローラと、
前記ロボットアームの動作を最適化する深層強化学習モデルと、
を備え、
前記ロボットコントローラは、
前記カメラによる撮影画像から物体を認識し、
認識された前記物体の把持点を探索し、
前記ロボットアームの先端にある把持部を、探索された前記把持点まで移動させる経路を生成し、
前記深層強化学習モデルは、生成された前記経路に沿って移動する前記ロボットアームの所定の関節部の角度を入力し、前記所定の関節部の角度の変化量をできる限り小さくするように学習され、学習された前記深層強化学習モデルに基づいて、前記ロボットアームの経路を決定するように構成された、経路決定システム。
続きを表示(約 950 文字)
【請求項2】
前記所定の関節部は、前記ロボットアームの先端部に位置する関節部以外の関節部から選択される1以上である、請求項1に記載の経路決定システム。
【請求項3】
前記ロボットアームと、作業員を含む障害物との距離を検知するセンサを更に備え、
前記深層強化学習モデルは、前記センサにより検知された前記距離が閾値以上となるように学習され、学習された前記深層強化学習モデルに基づいて、前記ロボットアームの経路を決定するように構成された、請求項1に記載の経路決定システム。
【請求項4】
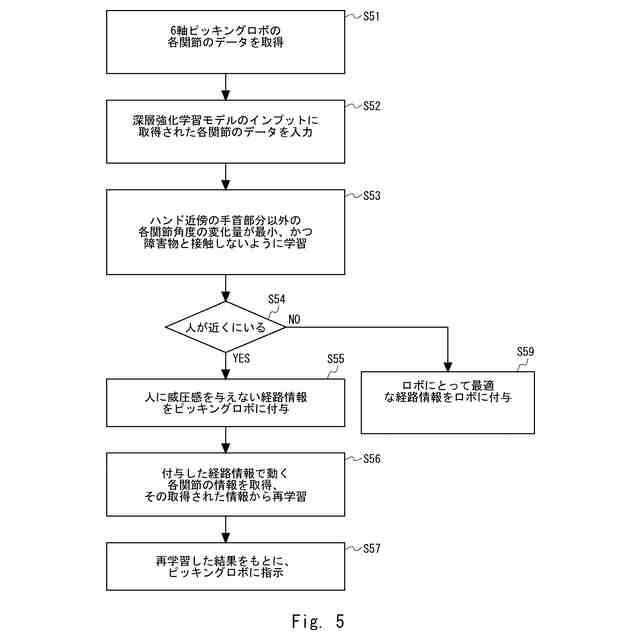
前記センサにより、前記ロボットアームの近傍に作業員が存在しないことが検知された場合、前記深層強化学習モデルに基づいて決定される経路を出力することを控え、所定の関節部の角度の変化量に関わらず任意の経路を出力し、
前記センサにより、前記ロボットアームの近傍に作業員が存在することが検知された場合、前記所定の関節部の角度の変化量をできる限り小さく、かつ、検知された前記作業員までの距離が閾値以上となるように学習された前記深層強化学習モデルに基づいて、前記ロボットアームの経路を決定するように構成された、請求項3に記載の経路決定システム。
【請求項5】
ロボットアームに搭載され、物体を撮影するカメラと、
前記ロボットアームの関節部に搭載され、関節部の角度データを取得するセンサと、
前記ロボットアームの動作を制御するロボットコントローラと、
前記ロボットアームの動作を最適化する深層強化学習モデルと、
を備えた経路決定システムを用いた経路決定方法であって、
前記カメラによる撮影画像から物体を認識しと、
認識された前記物体の把持点を探索し、
前記ロボットアームの先端にある把持部を、探索された前記把持点まで移動させる経路を生成し、
生成された前記経路に沿って移動する前記ロボットアームの所定の関節部の角度を入力し、前記所定の関節部の角度の変化量をできる限り小さくするように深層強化学習により学習された前記深層強化学習モデルに基づいて、前記ロボットアームの経路を決定する、経路決定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、経路決定システム及び方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、ピッキングロボットのワークを把持する把持ポーズを複数生成し、所定の条件を満たす把持ポーズに基づいてピッキングロボットの動作経路を生成する、経路生成装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-062416号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業員近傍でピッキングロボットを動作させる場合、ピッキングロボットが、作業員が想定できない大きな動作を実行してしまう場合がある。作業者や周辺物に接触しないとしてもこうした大きな動作で威圧感を与えてしまう場合がある。
【0005】
本開示は、このような問題点を解決するためになされたものであり、ロボットアームの大きな動作を抑制した経路決定システム及び経路決定方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様にかかる経路決定システムは、
ロボットアームに搭載され、物体を撮影するカメラと、
前記ロボットアームの関節部に搭載され、関節部の角度データを取得するセンサと、
前記ロボットアームの動作を制御するロボットコントローラと、
前記ロボットアームの動作を最適化する深層強化学習モデルと、
を備え、
前記ロボットコントローラは、
前記カメラによる撮影画像から物体を認識し、
認識された前記物体の把持点を探索し、
前記ロボットアームの先端にある把持部を、探索された前記把持点まで移動させる経路を生成し、
前記深層強化学習モデルは、生成された前記経路に沿って移動する前記ロボットアームの所定の関節部の角度を入力し、前記所定の関節部の角度の変化量をできる限り小さくするように学習され、学習された前記深層強化学習モデルに基づいて、前記ロボットアームの経路を決定するように構成されている。
【0007】
本開示の一態様にかかる経路決定方法は、
ロボットアームに搭載され、物体を撮影するカメラと、
前記ロボットアームの関節部に搭載され、関節部の角度データを取得するセンサと、
前記ロボットアームの動作を制御するロボットコントローラと、
前記ロボットアームの動作を最適化する深層強化学習モデルと、
を備えた経路決定システムを用いた経路決定方法であって、
前記カメラによる撮影画像から物体を認識しと、
認識された前記物体の把持点を探索し、
前記ロボットアームの先端にある把持部を、探索された前記把持点まで移動させる経路を生成し、
生成された前記経路に沿って移動する前記ロボットアームの所定の関節部の角度を入力し、前記所定の関節部の角度の変化量をできる限り小さくするように深層強化学習により学習された前記深層強化学習モデルに基づいて、前記ロボットアームの経路を決定する。
【発明の効果】
【0008】
本開示によれば、ロボットアームの大きな動作を抑制した経路決定システム及び方法を提供することができる。
【図面の簡単な説明】
【0009】
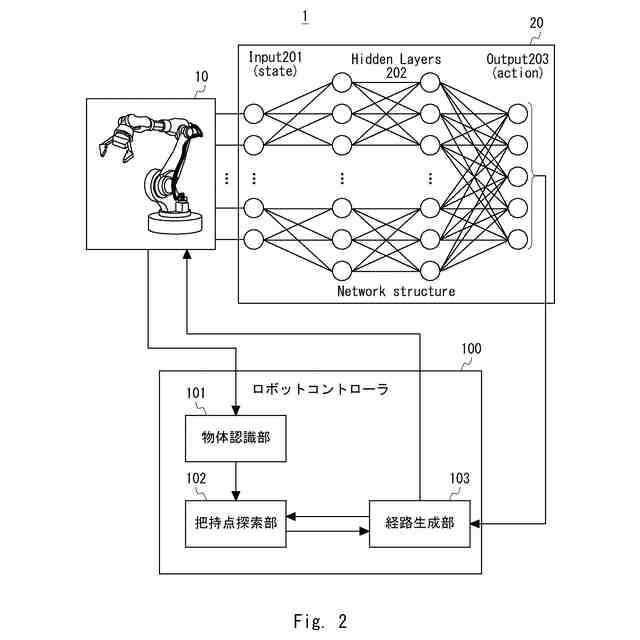
例示的なロボットアームの構成を説明する図である。
経路決定システムの構成を示す概念図である。
ピックアンドプレイス動作中の各工程におけるロボットアームの姿勢を説明する図である。
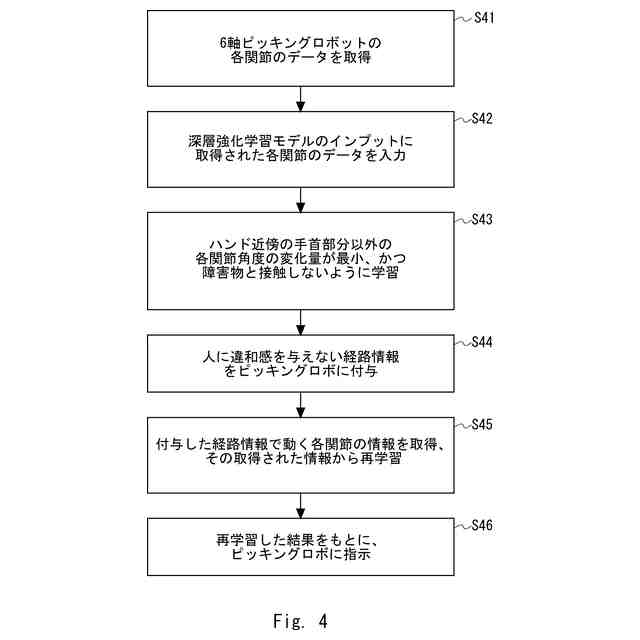
いくつかの実施形態にかかる経路決定方法を説明するフローチャートである。
他の実施形態にかかる経路決定方法を説明するフローチャートである。
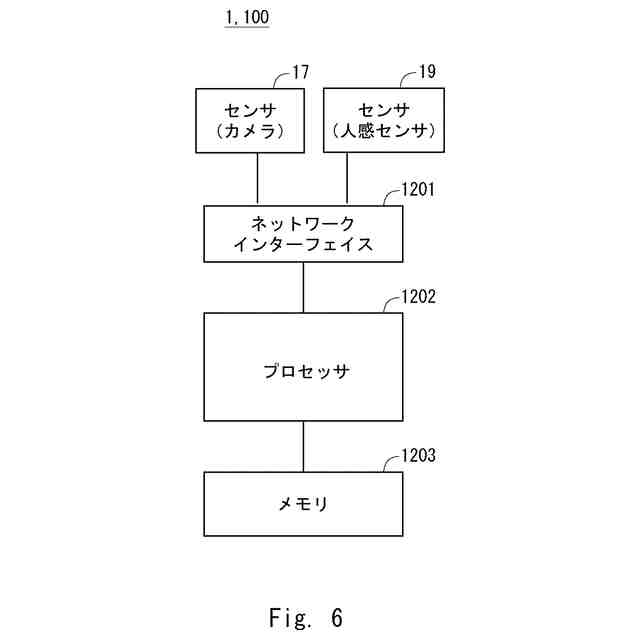
経路決定システムのハードウェア構成例を説明する図である。
【発明を実施するための形態】
【0010】
以下、本発明を適用した具体的な実施形態について、図面を参照しながら詳細に説明する。ただし、本発明が以下の実施形態に限定される訳ではない。また、説明を明確にするため、以下の記載および図面は、適宜、簡略化されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
24日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
13日前
株式会社ダイヘン
移動体
1か月前
住友重機械工業株式会社
教示装置
10日前
株式会社ダイヘン
搬送装置
17日前
個人
ペグハンマおよびペグハンマ用部品
17日前
川崎重工業株式会社
ロボット
11日前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
10日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
10日前
住友重機械工業株式会社
支援装置
17日前
住友重機械工業株式会社
支援装置
17日前
株式会社マキタ
電気機器
11日前
オークラ輸送機株式会社
ハンド装置
1か月前
アピュアン株式会社
衝撃工具
19日前
株式会社スター精機
産業用ロボット
1か月前
ホシデン株式会社
分解用治具
17日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社リコー
多関節ロボット
17日前
工機ホールディングス株式会社
作業機
13日前
工機ホールディングス株式会社
作業機
13日前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
13日前
工機ホールディングス株式会社
作業機
13日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社ジャノメ
ロボット
1か月前
SMC株式会社
ベルヌーイグリッパ
13日前
株式会社ダイヘン
ロボット制御システム
1か月前
セイコーエプソン株式会社
ロボット
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































