TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025005044
公報種別
公開特許公報(A)
公開日
2025-01-16
出願番号
2023105031
出願日
2023-06-27
発明の名称
塗装ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
17/02 20060101AFI20250108BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】塗装器具の位置を精密に調整することが可能な塗装ロボットを提供する。
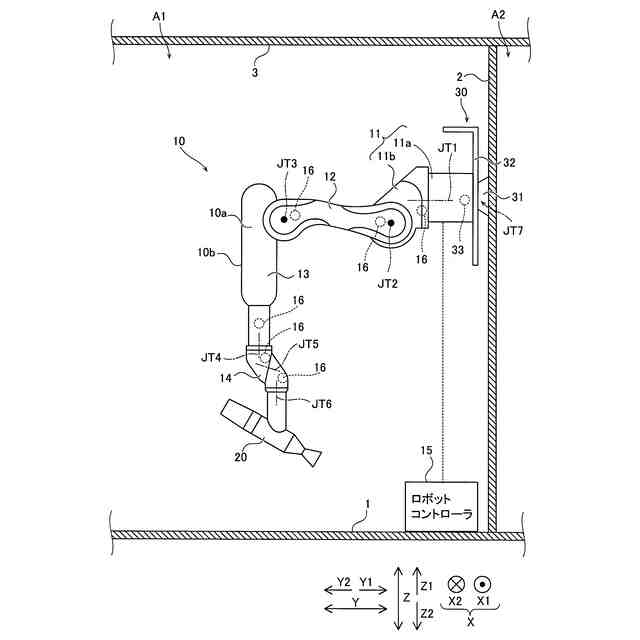
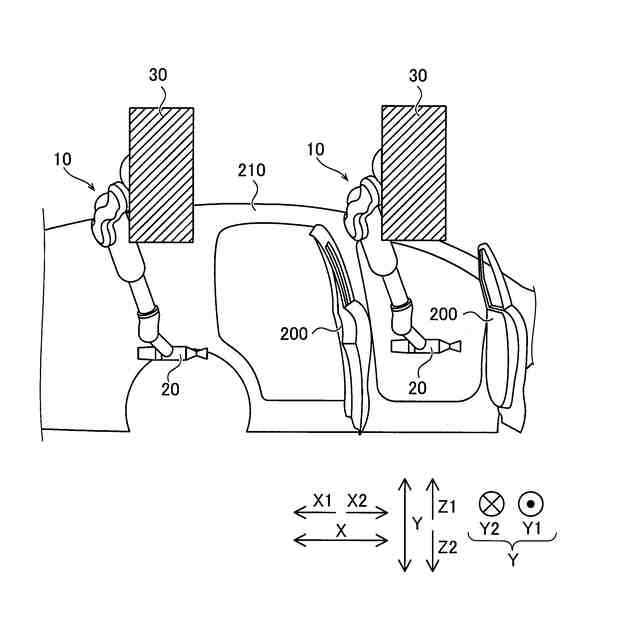
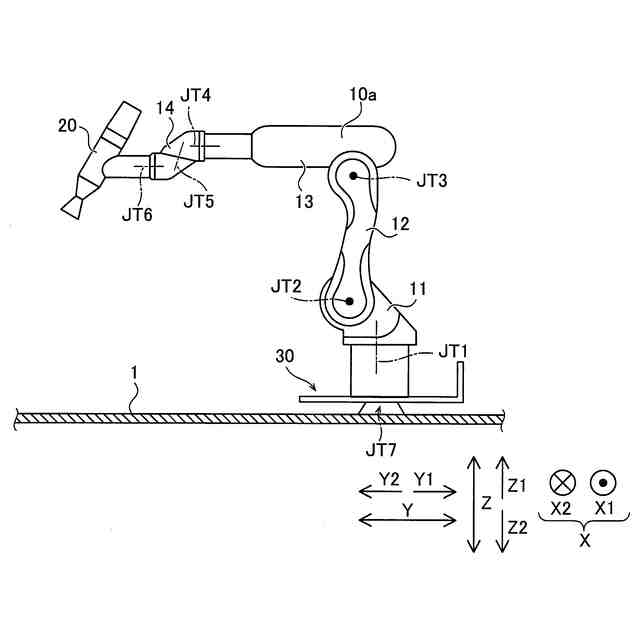
【解決手段】この塗装ロボット10は、先端に塗装器具20が取り付けられ、JT1関節からJT6関節までを有する垂直多関節型のロボットアーム部10aと、ロボットアーム部10aの基端に接続され、ロボットアーム部10aを直線移動させる直動軸30と、ワーク200に対して塗装作業を実行する際に、ロボットアーム部10aのJT1関節からJT6関節までと直動軸30とを連動して動作させるロボットコントローラ15と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
先端に塗装器具が取り付けられ、関節を有する垂直多関節型のロボットアーム部と、
前記ロボットアーム部の基端に接続され、前記ロボットアーム部を前記ロボットアーム部の配置面に沿って直線移動させる直動軸と、
ワークに対して塗装作業を実行する際に、前記ロボットアーム部の前記関節と前記直動軸とを連動して動作させる制御部と、を備える、塗装ロボット。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、前記ロボットアーム部の前記関節と前記直動軸とを連動して動作させることにより、前記ワークに対して前記塗装器具を一定の速度で移動させる、請求項1に記載の塗装ロボット。
【請求項3】
前記制御部は、前記関節と前記直動軸とに対して共通のロボットコントローラを含む、請求項1に記載の塗装ロボット。
【請求項4】
前記ロボットアーム部の前記関節を駆動する関節駆動部と、
前記直動軸を駆動する直動軸駆動部と、を備え、
前記ロボットアーム部は、防爆部としてのアーム用筐体を含み、
前記関節駆動部および前記直動軸駆動部は、前記アーム用筐体の内部に配置されている、請求項1に記載の塗装ロボット。
【請求項5】
前記ロボットアーム部の前記関節を駆動する関節駆動部と、
前記直動軸を駆動する直動軸駆動部と、を備え、
前記ロボットアーム部は、防爆部としてのアーム用筐体を含み、
前記関節駆動部は、前記アーム用筐体の内部に配置されており、
前記直動軸は、防爆が必要な防爆領域と防爆が必要でない非防爆領域とを隔てる壁部に取り付けられており、
前記直動軸駆動部は、前記非防爆領域に配置されている、請求項1に記載の塗装ロボット。
【請求項6】
前記直動軸を駆動する直動軸駆動部を備え、
前記直動軸駆動部は、モータまたはエアシリンダを含む、請求項1に記載の塗装ロボット。
【請求項7】
前記直動軸は、床面、前記床面に垂直な壁部、または、前記床面に対向する天井面に配置されている、請求項1に記載の塗装ロボット。
【請求項8】
前記直動軸は、前記壁部に配置されており、
前記天井面と前記直動軸との間に配置され前記直動軸にかかる重力を打ち消すスプリング部を備える、請求項7に記載の塗装ロボット。
【請求項9】
前記塗装ロボットは、6つの前記関節を有する前記ロボットアーム部と、前記直動軸とを有する、7軸の垂直多関節型の塗装ロボットを含む、請求項1に記載の塗装ロボット。
【請求項10】
前記塗装ロボットは、所定の方向に沿って複数配置され、
前記直動軸は、前記所定の方向に直交する方向に前記ロボットアーム部を移動させる、請求項1に記載の塗装ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、塗装ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、ワークに対して塗装作業を実行する塗装ロボットが開示されている。特許文献1には、塗装用のスプレーガンを水平方向に移動させる水平アームと、水平アームを鉛直方向に沿って移動させる垂直アームと、を備える塗装ロボットが開示されている。特許文献1の塗装ロボットは、水平アームによってスプレーガンを水平方向に移動させながら、車体の上面に対して塗装作業を実行する。また、垂直アームによって水平アームが昇降されることにより、車体の上面とスプレーガンとの間の距離が調整されている。
【先行技術文献】
【特許文献】
【0003】
特開平4-111787号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示されている塗装ロボットでは、スプレーガンは、水平方向と鉛直方向との2方向にしか移動できないため、スプレーガンの移動の自由度が低いという問題点がある。そこで、スプレーガンのような塗装器具の移動の自由度を高めることが可能な塗装ロボットが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、塗装器具の移動の自由度を高めることが可能な塗装ロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面による塗装ロボットは、先端に塗装器具が取り付けられ、関節を有する垂直多関節型のロボットアーム部と、ロボットアーム部の基端に接続され、ロボットアーム部をロボットアーム部の配置面に沿って直線移動させる直動軸と、ワークに対して塗装作業を実行する際に、ロボットアーム部の関節と直動軸とを連動して動作させる制御部と、を備える。
【0007】
この開示の一の局面による塗装ロボットは、上記のように、制御部は、ワークに対して塗装作業を実行する際に、垂直多関節型のロボットアーム部の関節と直動軸とを連動して動作させる。これにより、垂直多関節型のロボットアーム部は、水平方向および鉛直方向に加えて、水平方向および鉛直方向に交差する様々な方向に塗装器具を移動させることができるとともに、直動軸は、ロボットアーム部の配置面に沿った方向の位置を変更することができる。その結果、塗装器具の移動の自由度を高めることができる。
【発明の効果】
【0008】
本開示によれば、塗装ロボットは、塗装器具の移動の自由度を高めることができる。
【図面の簡単な説明】
【0009】
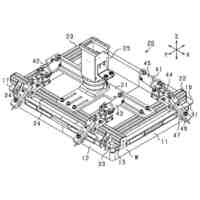
第1実施形態による塗装ロボットシステムを上方から見た図である。
第1実施形態による塗装ロボットを側方から見た図である。
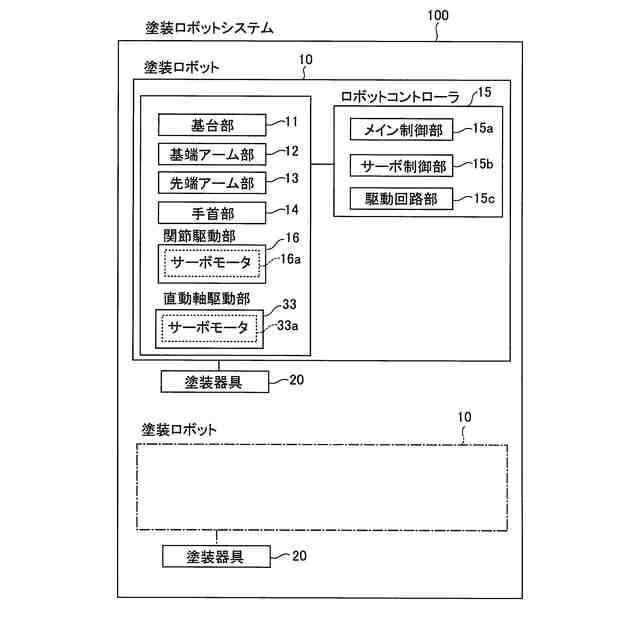
第1実施形態による塗装ロボットシステムのブロック図である。
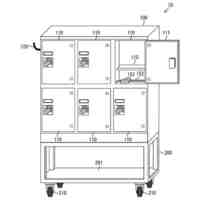
第1実施形態による塗装ロボットシステムを側方から見た図である。
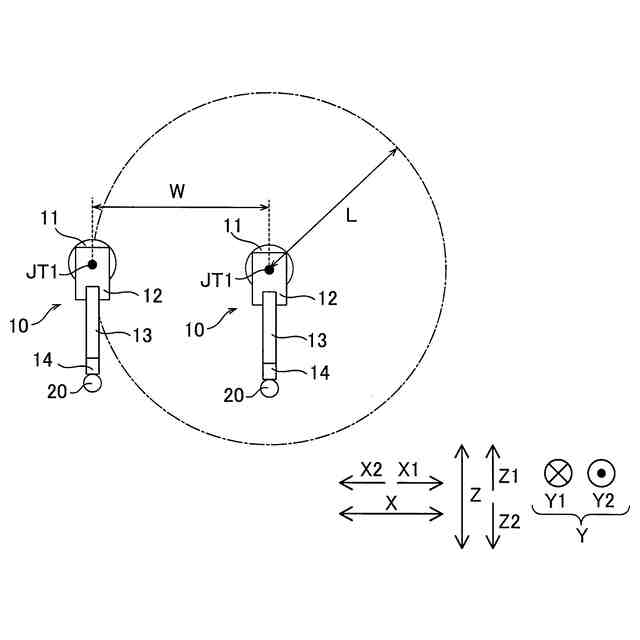
第1実施形態による塗装ロボットの可動範囲を示す図である。
第2実施形態による塗装ロボットを側方から見た図である。
第3実施形態による塗装ロボットを側方から見た図である。
第1変形例による塗装ロボットを側方から見た図である。
第2変形例による塗装ロボットを側方から見た図である。
第3変形例による塗装ロボットを側方から見た図である。
第4変形例による塗装ロボットを側方から見た図である。
第5変形例による塗装ロボットを側方から見た図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の一実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
5か月前
個人
関節モジュール
4か月前
個人
寸切りボルト回し
4か月前
個人
スロットルトリガー
4か月前
株式会社エビス
連結具
1か月前
太陽工業株式会社
チャック装置
4か月前
コクヨ株式会社
補助器具
4か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
日東工器株式会社
動力工具
5か月前
個人
メンテナンス用スタンド
6か月前
川崎重工業株式会社
ロボット
1か月前
オムロン株式会社
電動把持工具
4か月前
CKD株式会社
把持装置
4か月前
トヨタ自動車株式会社
ロボット
5か月前
東京計器株式会社
接触検知装置
5か月前
株式会社マキタ
電動工具
1か月前
学校法人立命館
グリッパ
4か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
2か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ハーモ
開閉チャック装置
5か月前
株式会社エビス
携帯付属物取付具
2か月前
個人
容器引っ掛け棒およびその使用方法
6か月前
株式会社ダイヘン
搬送装置
3か月前
個人
回転工具およびバリ取り部品
5か月前
株式会社マキタ
電動ハンマ
2か月前
株式会社ダイヘン
制御装置
2か月前
白山工業株式会社
ロボットアーム
4か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
1か月前
株式会社スター精機
把持装置
4か月前
SMC株式会社
グリッパ
3か月前
国立大学法人佐賀大学
協働システム
4か月前
株式会社大林組
ロッカー装置
5か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ