TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024121750
公報種別
公開特許公報(A)
公開日
2024-09-06
出願番号
2023056588
出願日
2023-02-27
発明の名称
寸切りボルト回し
出願人
個人
代理人
主分類
B25B
13/48 20060101AFI20240830BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ネジ山を潰さない、寸切りボルトを回す工具を提供する。
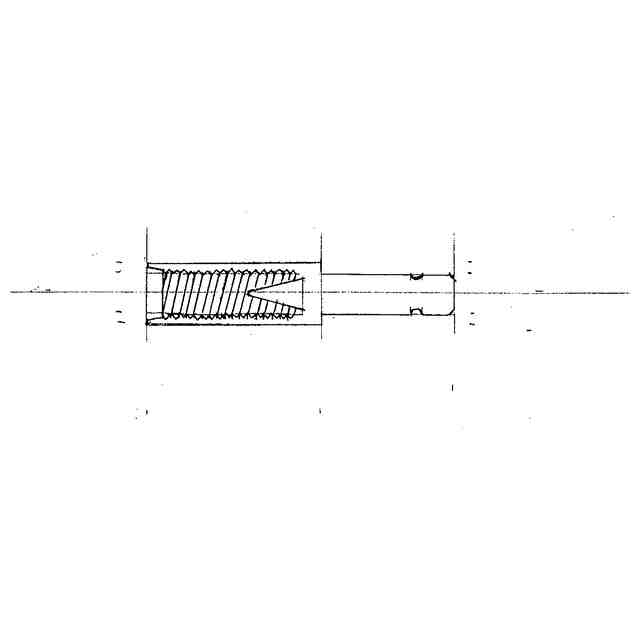
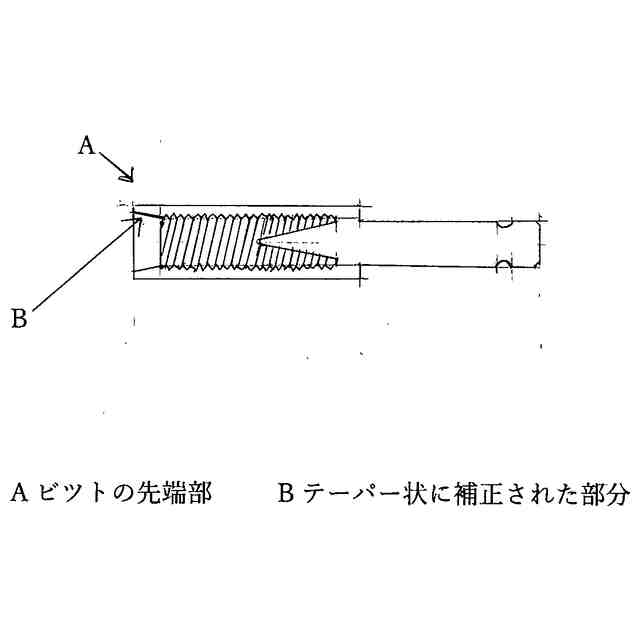
【解決手段】長いナットに回す六角ビットとネジ山を潰さないためのとっきを中の中心に取り付けたもの。
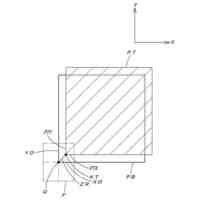
【選択図】図2
特許請求の範囲
【請求項1】
これまではネジを回すとネジ山が傷んでいました.傷まずに早くねじ込む事ができる技術が.私の権利です
この発明は回すネジとそのネジ山に合ったナットとそのナットを回す部品からできています
これを作るには.長いナットに反対側を尖らせた六角ビットを入れて固定します
回すネジがナットの中で尖らせた部分と.ぶつかる事でネジのネジ山が傷まず作業の省力化になります。
発明の詳細な説明
【技術分野】
【0001】
この発明は寸切りボルトをナットで回すものに関するものである。
続きを表示(約 380 文字)
【背景技術】
【0002】
従来の寸切りボルト回しはネジ山を潰しながら回していた
【発明の概要】
【発明が解決しようとする課題】
【0003】
これは次のような欠点があった
ネジ山を3点で抑えて回す為にネジ山が潰れていた
本発明は以上のような欠点を無くすためになされたものである
【課題を解決する為の手段】
【0004】
長いナットに回す六角ビットとネジ山を潰さないためのとっきを中の中心に取り 付けたもの
【発明の効果】
【0005】
寸切りボルトのネジ山をつぶさないでボルトを回し付けた後.軽くナットをまわすことができる
【図面の簡単な説明】
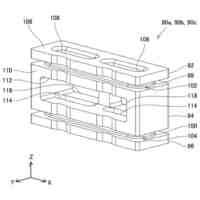
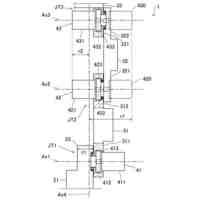
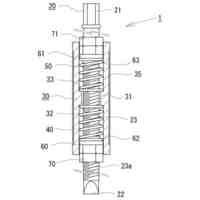
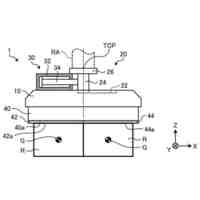
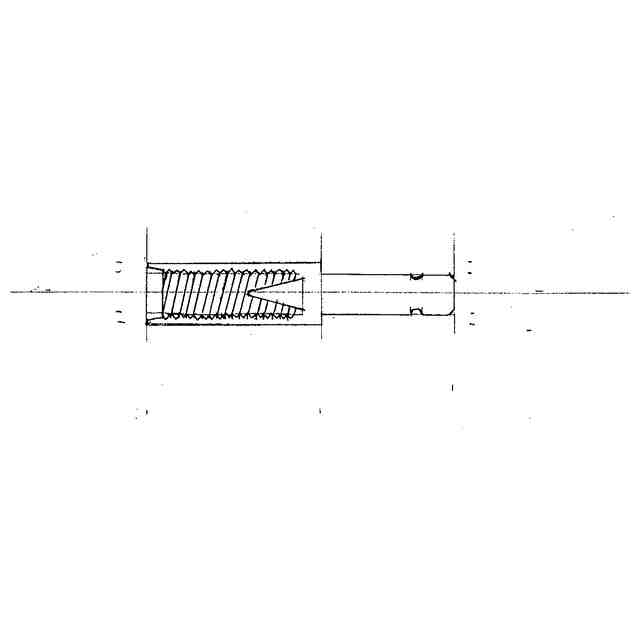
【0006】
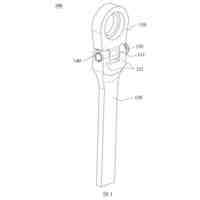
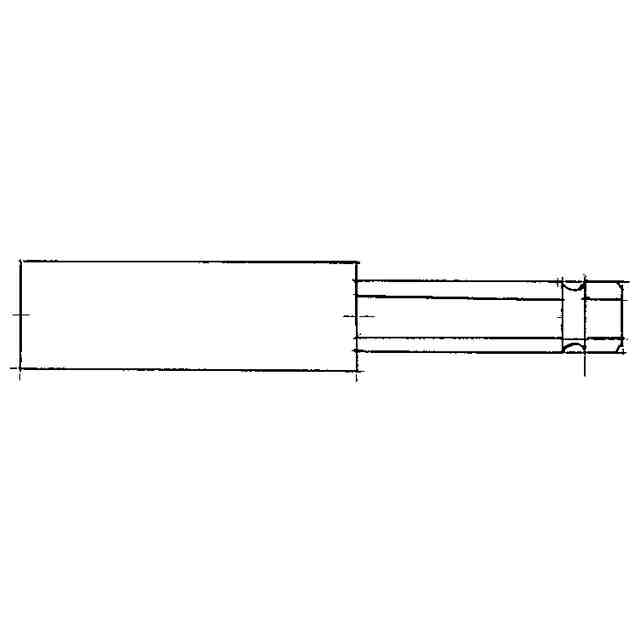
本発明の斜視図である
本発明の断面図である
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
26日前
株式会社マキタ
電動工具
19日前
国立大学法人金沢大学
ロボット
5日前
株式会社ケー・エフ・シー
締結構造
9日前
日本信号株式会社
作業機制御システム
19日前
株式会社京阪エンジニアリング
脱着装置
20日前
アピュアン株式会社
衝撃工具
今日
株式会社マキタ
集塵アタッチメント
19日前
株式会社スター精機
ワーク搬送装置
23日前
トヨタ自動車株式会社
把持装置、把持方法
13日前
株式会社コスメック
把持装置
6日前
株式会社ダイヘン
ロボット制御システム
9日前
国立大学法人 東京大学
ロボットアーム
6日前
株式会社不二越
ロボットビジョンシステム
12日前
原利興工業有限公司
工具用スリーブ
5日前
株式会社マキタ
作業機
5日前
株式会社マキタ
作業機
5日前
株式会社マキタ
電動工具
26日前
株式会社マキタ
作業機
5日前
川崎重工業株式会社
多関節ロボット
19日前
川崎重工業株式会社
多関節ロボット
19日前
セイコーエプソン株式会社
ロボットシステム
5日前
アピュアン株式会社
エアー式衝撃工具用先端具
12日前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
23日前
工機ホールディングス株式会社
作業機
19日前
工機ホールディングス株式会社
作業機
19日前
優鋼機械股ふん有限公司
首振り式レンチ
12日前
株式会社ショウワテクノ
ハンドリングシステム及びその方法
5日前
トヨタ自動車株式会社
ロボット制御装置、制御方法及びプログラム
13日前
三菱重工業株式会社
把持装置および方法
12日前
三菱重工業株式会社
把持装置および方法
12日前
日本信号株式会社
ケーブル中継モジュール及び多関節ロボット
19日前
ファナック株式会社
ロボット組立て技能学習方法
21日前
パナソニックIPマネジメント株式会社
インパクト工具
5日前
三菱重工業株式会社
把持装置及び把持装置の制御方法
12日前
コニカミノルタ株式会社
プログラム及び教示支援装置
26日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ