TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025027241
公報種別
公開特許公報(A)
公開日
2025-02-27
出願番号
2023131880
出願日
2023-08-14
発明の名称
ロボット制御装置、制御方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
9/18 20060101AFI20250219BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】人共生ロボットのバックドライバビリティを向上させる。
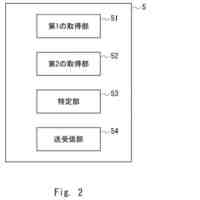
【解決手段】ロボット制御装置は、ロボットを駆動する駆動部の出力軸の速度を計算する速度計算部と、速度計算部により検出された第1速度と、第1速度よりも小さい第2速度とを比較した場合、第2速度のときの粘性抵抗が第1速度の時の粘性抵抗よりも0に近くなるように、供給トルク指令を補償して、駆動部に出力する出力トルク指令を生成するための、粘性抵抗補償値を計算する補償値計算部とを備える。
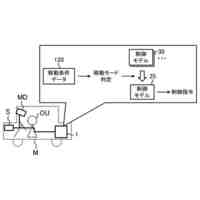
【選択図】図2
特許請求の範囲
【請求項1】
ロボットを駆動する駆動部の出力軸の速度を計算する速度計算部と、
前記速度計算部により検出された第1速度と、前記第1速度よりも小さい第2速度とを比較した場合、前記第2速度のときの粘性抵抗が前記第1速度の時の粘性抵抗よりも0に近くなるように、供給トルク指令を補償して、前記駆動部に出力する出力トルク指令を生成するための、粘性抵抗補償値を計算する補償値計算部と、
を備える、
ロボット制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記補償値計算部は、
前記駆動部の出力軸の速度が0よりも大きい場合、次の式に基づいて、粘性抵抗補償値を計算し、
T
d
=-k
1
×ω
2
+k
2
×ω、
前記駆動部の出力軸の速度が0以下である場合、次の式に基づいて、粘性抵抗補償値を計算する、
T
d
=k
1
×ω
2
+k
2
×ω
請求項1に記載のロボット制御装置。
なお、
ωは、速度[rad/s]、
k
2
は、低速動作領域で測定した粘性抵抗の測定値
k
1
は、k
2
/(2ω
0
)
ω
0
は、補償する最大速度
である。
【請求項3】
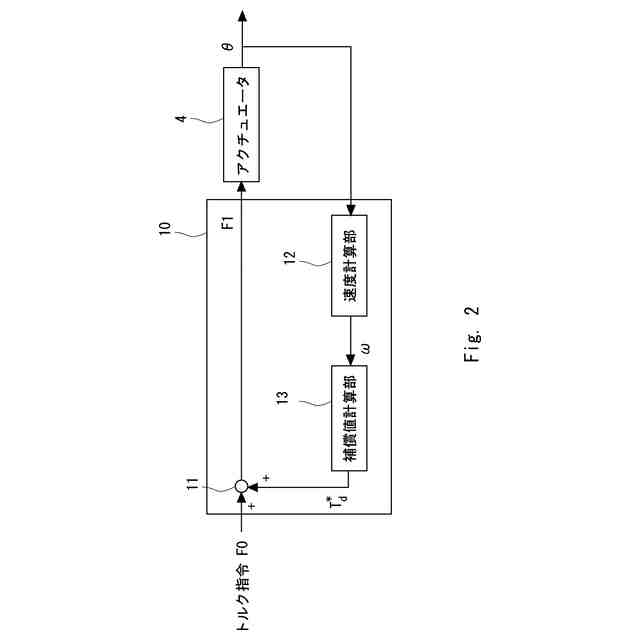
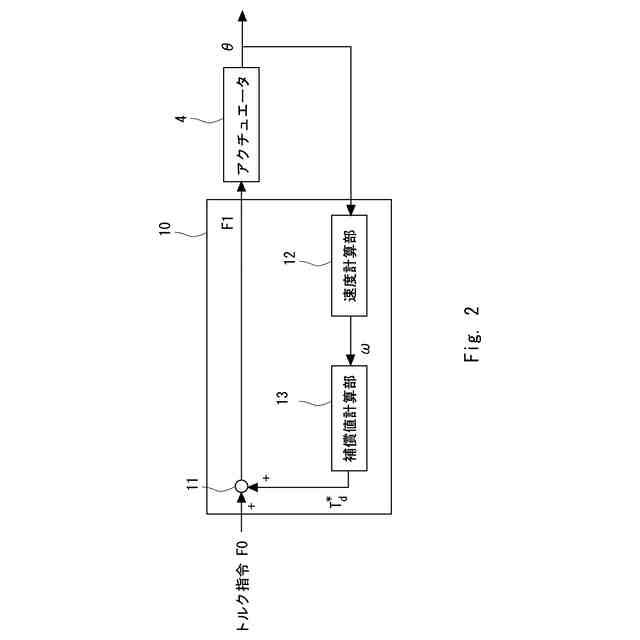
前記供給トルク指令に前記粘性抵抗補償値を加算して、前記出力トルク指令を生成する、加算器をさらに備える、
請求項1に記載のロボット制御装置。
【請求項4】
前記駆動部は、前記ロボットの関節部を回転駆動するモータと、減速機とを含む、
請求項1に記載のロボット制御装置。
【請求項5】
前記ロボットは、
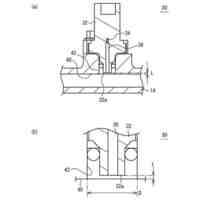
本体部から延びると共に、根元から所定距離以上離れた位置に少なくとも1つの関節部を有するアーム部と、
前記関節部を回転駆動する駆動力を発生させる、少なくとも1つの前記駆動部と、
対応する前記関節部と前記駆動部とを間に設けられ、前記駆動部の駆動力を対応する前記関節部に伝達する、少なくとも1つの伝達部と、
を備え、
前記駆動部は、前記アーム部の根元に集約的に設けられている、
請求項1に記載のロボット制御装置。
【請求項6】
前記ロボットは、前記駆動部の回転情報を検出する少なくとも1つの回転検出部をさらに備え、
前記速度計算部は、前記回転検出部により検出された前記駆動部の回転情報に基づいて、前記速度を計算する、
請求項3に記載のロボット制御装置。
【請求項7】
コンピュータが、
ロボットを駆動する駆動部の出力軸の速度を計算する処理と、
速度を計算する処理で求められた第1速度と、前記第1速度よりも小さい第2速度とを比較した場合、前記第2速度のときの粘性抵抗が前記第1速度の時の粘性抵抗よりも0に近くなるように、供給トルク指令を補償して、前記駆動部に出力する出力トルク指令を生成するための、粘性抵抗補償値を計算する処理と、
を実行する、
制御方法。
【請求項8】
ロボットを駆動する駆動部の出力軸の速度を計算する処理と、
速度を計算する処理で求められた第1速度と、前記第1速度よりも小さい第2速度とを比較した場合、前記第2速度のときの粘性抵抗が前記第1速度の時の粘性抵抗よりも0に近くなるように、供給トルク指令を補償して、前記駆動部に出力する出力トルク指令を生成するための、粘性抵抗補償値を計算する処理と、
をコンピュータに実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御装置、制御方法及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、設定した制御信号から、外乱オブザーバによる推定外乱を差し引いて、アクチュエータの制御信号を出力する技術が開示されている。外乱オブザーバは、アクチュエータからフィードバックされたアクチュエータの速度と制御信号とを入力として、外乱を推定している。
【先行技術文献】
【特許文献】
【0003】
特開2022-178399号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人との共生を目指すために柔軟性の高いロボットアームが求められている。また、ロボットアームは、例えば、機械学習などを行って動作することも想定される。ロボットアームの柔軟性を高めるためには、アクチュエータのバックドライバビリティ(外から動かしたときの動かし易さ)を高くすることが重要である。特許文献1では、外力に対して、外乱オブザーバを使用してフィードバック制御にてアクチュエータの制御信号を補償しているため、十分なバックドライバビリティを得ることが難しい。
【0005】
本開示は、このような問題点を解決するためになされたものであり、バックドライバビリティを向上させることができるロボット制御装置、制御方法及びプログラムを提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
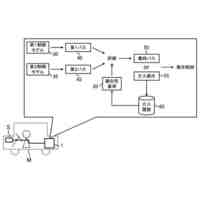
本開示の一態様に係るロボット制御装置は、
ロボットを駆動する駆動部の出力軸の速度を計算する速度計算部と、
前記速度計算部により求められた第1速度と、前記第1速度よりも小さい第2速度とを比較した場合、前記第2速度のときの粘性抵抗が前記第1速度の時の粘性抵抗よりも0に近くなるように、供給トルク指令を補償して、前記駆動部に出力する出力トルク指令を生成するための、粘性抵抗補償値を計算する補償値計算部と、
を備える。
【0007】
本開示の一態様に係る制御方法は、
コンピュータが、
ロボットを駆動する駆動部の出力軸の速度を計算する処理と、
速度を計算する処理で求められた第1速度と、前記第1速度よりも小さい第2速度とを比較した場合、前記第2速度のときの粘性抵抗が前記第1速度の時の粘性抵抗よりも0に近くなるように、供給トルク指令を補償して、前記駆動部に出力する出力トルク指令を生成するための、粘性抵抗補償値を計算する処理と、
を実行する。
【0008】
本開示の一態様に係るプログラムは、
ロボットを駆動する駆動部の出力軸の速度を計算する処理と、
速度を計算する処理で求められた第1速度と、前記第1速度よりも小さい第2速度とを比較した場合、前記第2速度のときの粘性抵抗が前記第1速度の時の粘性抵抗よりも0に近くなるように、供給トルク指令を補償して、前記駆動部に出力する出力トルク指令を生成するための、粘性抵抗補償値を計算する処理と、
をコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、バックドライバビリティを向上させることができるロボット制御装置、制御方法及びプログラムを提供することができる。
【図面の簡単な説明】
【0010】
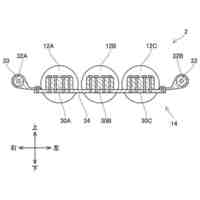
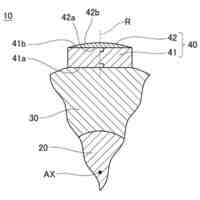
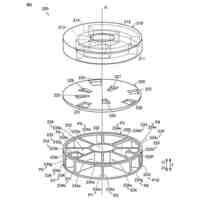
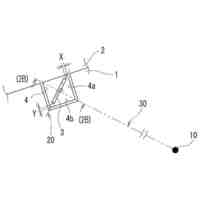
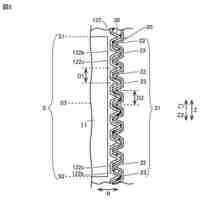
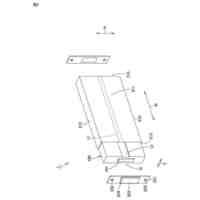
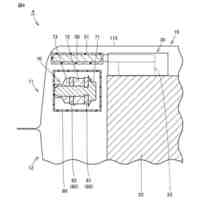
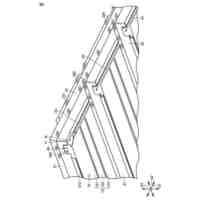
実施形態に係るロボットのアーム部の概略的な構成を示す斜視図である。
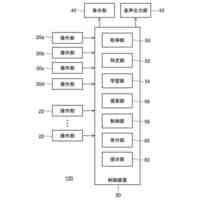
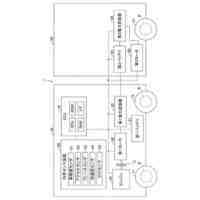
実施形態に係るロボット制御装置の概略的な構成を示すブロック図である。
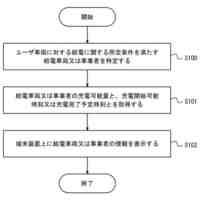
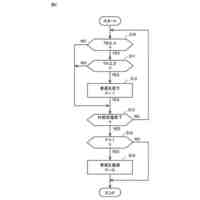
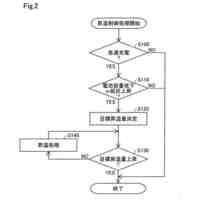
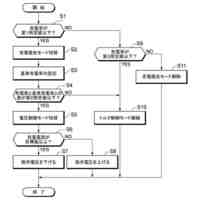
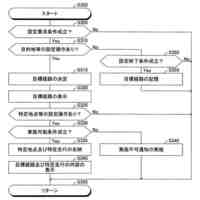
図2の補償値計算部における補償値の計算について説明するフロー図である。
粘性抵抗補償値の一例を示すグラフである。
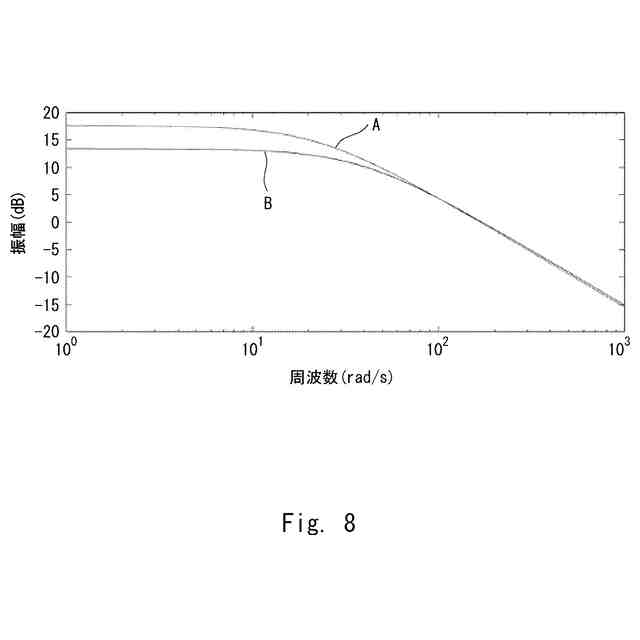
実施形態の効果を説明する図である。
実施形態の効果を説明する図である。
実施形態の効果を説明する図である。
実施形態の効果を説明する図である。
実施形態の効果を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
方法
6日前
トヨタ自動車株式会社
方法
6日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
単電池
13日前
トヨタ自動車株式会社
ロータ
21日前
トヨタ自動車株式会社
ロータ
14日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
電動車両
13日前
トヨタ自動車株式会社
制御装置
21日前
トヨタ自動車株式会社
蓄電セル
6日前
トヨタ自動車株式会社
分離装置
7日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
切替装置
13日前
トヨタ自動車株式会社
電動車両
21日前
トヨタ自動車株式会社
切替装置
13日前
トヨタ自動車株式会社
充電方法
6日前
トヨタ自動車株式会社
連結構造
10日前
トヨタ自動車株式会社
蓄電装置
6日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
充電装置
13日前
トヨタ自動車株式会社
連結車両
20日前
トヨタ自動車株式会社
蓄電セル
13日前
トヨタ自動車株式会社
蓄電装置
21日前
トヨタ自動車株式会社
管理装置
22日前
トヨタ自動車株式会社
接合装置
7日前
トヨタ自動車株式会社
モータ装置
21日前
トヨタ自動車株式会社
レーダ装置
6日前
トヨタ自動車株式会社
熱管理回路
20日前
トヨタ自動車株式会社
電気自動車
6日前
トヨタ自動車株式会社
電池パック
21日前
トヨタ自動車株式会社
高圧タンク
21日前
トヨタ自動車株式会社
電池パック
7日前
トヨタ自動車株式会社
燃圧センサ
21日前
トヨタ自動車株式会社
自動運転装置
6日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ