TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025025292
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129936
出願日
2023-08-09
発明の名称
多関節ロボット
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
9/06 20060101AFI20250214BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多関節ロボットの関節の支持強度を高める。
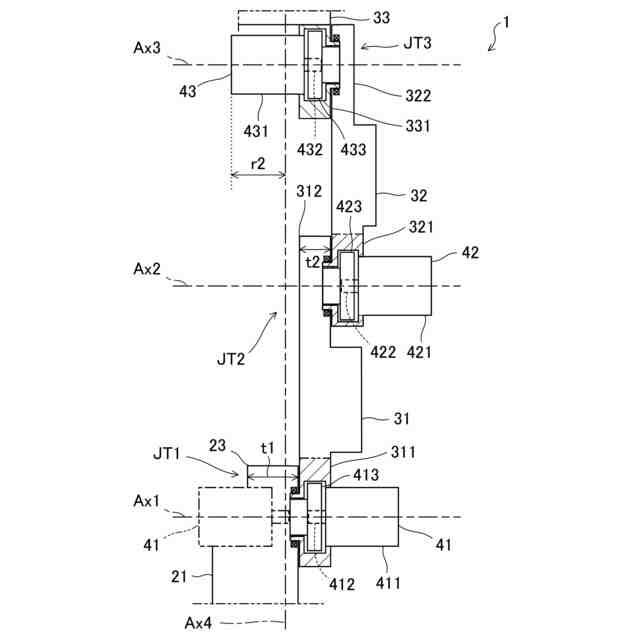
【解決手段】多関節ロボット1は、第1軸(軸Ax1)が伸びる方向に並ぶ第1支持部(支持部23)と第1動作部(第1端311)とを有する第1関節(関節JT1)と、第1本体(本体411)と、第1シャフト(シャフト421)と、を有しかつ、第1本体が、第1動作部を基準にして第1支持部とは逆側に位置する第1アクチュエータ(アクチュエータ41)と、第1関節に直列でかつ第1関節に支持された第2関節(関節JT2)であって、第2支持部(第2端312)と第2動作部(第1端321)とを有する第2関節と、第2本体(本体421)と、第2シャフト(シャフト422)と、を有しかつ、第1軸又は第2軸(軸Ax2)が伸びる方向について、第2シャフトの突出する向きが第1シャフトの突出する向きとは逆である第2アクチュエータ(アクチュエータ42)と、を備える。
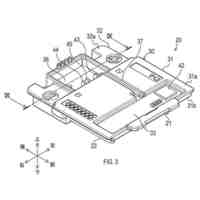
【選択図】図3
特許請求の範囲
【請求項1】
水平な第1軸が伸びる方向に並ぶ第1支持部と第1動作部とを有しかつ、前記第1動作部が、前記第1軸を中心に、前記第1支持部に対し相対回転する第1関節と、
第1本体と、前記第1本体から突出すると共に前記第1関節に接続された第1シャフトと、を有しかつ、前記第1シャフトを通じて前記第1関節を動かす第1アクチュエータであって、前記第1本体が、前記第1動作部を基準にして前記第1支持部とは逆側に位置する第1アクチュエータと、
前記第1関節に直列でかつ前記第1関節に支持された第2関節であって、第2支持部と前記第2支持部に支持された第2動作部とを有しかつ、前記第1軸に平行な第2軸を中心に、前記第2動作部が前記第2支持部に対し相対回転する第2関節と、
第2本体と、前記第2本体から突出すると共に前記第2関節に接続された第2シャフトと、を有しかつ、前記第2シャフトを通じて前記第2関節を動かす第2アクチュエータであって、前記第1軸又は前記第2軸が伸びる方向について、前記第2シャフトの突出する向きが前記第1シャフトの突出する向きとは逆である第2アクチュエータと、
を備える、多関節ロボット。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の多関節ロボットにおいて、
前記第1本体は、前記第1軸又は前記第2軸が伸びる方向について、前記第1関節を基準にした第1側に位置し、
前記第2本体は、前記第1軸又は前記第2軸が伸びる方向について、前記第2関節を基準にした、前記第1側とは逆の第2側に位置する、多関節ロボット。
【請求項3】
請求項2に記載の多関節ロボットにおいて、
前記第1動作部は、前記第1本体を支持する、多関節ロボット。
【請求項4】
請求項2又は3に記載の多関節ロボットにおいて、
前記第2支持部は、前記第2本体を支持する、多関節ロボット。
【請求項5】
請求項1に記載の多関節ロボットにおいて、
前記第1関節及び前記第2関節に直列でかつ、前記第1関節に支持された第3関節であって、第3支持部と前記第3支持部に支持された第3動作部とを有しかつ、前記第1軸に平行な第3軸を中心に、前記第3動作部が前記第3支持部に対し相対回転する第3関節と、
第3本体と、前記第3本体から突出すると共に前記第3関節に接続された第3シャフトと、を有しかつ、前記第3シャフトを通じて前記第3関節を動かす第3アクチュエータと、をさらに備える、多関節ロボット。
【請求項6】
請求項5に記載の多関節ロボットにおいて、
前記第3シャフトの突出する向きは、前記第1軸、前記第2軸、又は、前記第3軸が伸びる方向について、前記第1シャフトの突出する向きとは逆でかつ、前記第2シャフトの突出する向きと同じである、多関節ロボット。
【請求項7】
請求項5又は6に記載の多関節ロボットにおいて、
前記第1軸に直交する第4軸を中心に旋回する第4関節であるベースと、
前記第1関節を介して、前記ベースに連結された第1リンクと、
前記第2関節を介して、前記第1リンクに連結された第2リンクと、
前記第3関節を介して、前記第2リンクに連結された第3リンクと、
前記第3リンクを前記第1軸に直交する第5軸を中心に回転させる第5関節と、
前記第3リンクに連結された第4リンクと、
前記第3リンクと前記第4リンクとの間に介在しかつ、前記第1軸に平行な第6軸を中心に、前記第4リンクを前記第3リンクに対し相対回転させる第6関節と、
前記第4リンクを前記第1軸に直交する第7軸を中心に回転させる第7関節と、をさらに備える、多関節ロボット。
【請求項8】
請求項7に記載の多関節ロボットにおいて、
物品を保持するハンドであって、前記第4リンクに支持されたハンドをさらに備える、多関節ロボット。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、多関節ロボットに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、従来の多関節ロボットが記載されている。従来の多関節ロボットは、7関節ロボットである。従来の多関節ロボットは、直列に接続された第一腕部、第二腕部及び第三腕部を備えている。第一腕部のアクチュエータは、水平な軸線まわりに第一腕部を揺動し、第二腕部のアクチュエータは、水平な軸線まわりに第二腕部を揺動し、第三腕部のアクチュエータは、水平な軸線まわりに第三腕部を揺動する。三つのアクチュエータは、第一腕部及び第二腕部を基準にして、水平な軸線に沿う方向における同じ側に位置している。
【先行技術文献】
【特許文献】
【0003】
特許第5975129号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
複数の関節が直列につながった多関節ロボットでは、特定の関節が他の一つ又は複数の関節を支持するため、前記特定の関節の支持強度が高くされる。例えば一般的な6軸の多関節ロボットは、旋回部に接続された第一腕部と、第一腕部に接続された第二腕部とを備えている。旋回部と第一腕部とを接続する特定の関節は、第一腕部と第二腕部とを接続する第2の関節を支持するため、支持強度が高くされる。
【0005】
前記従来の多関節ロボットにおいて旋回部と第一腕部とを接続する関節には、一般的な6軸の多関節ロボットの関節よりも高い支持強度が要求される。なぜなら、従来の多関節ロボットの、腕部及びアクチュエータの数は、一般的な6軸の多関節ロボットよりも多いからである。
【0006】
従来の多関節ロボットの前記関節は、旋回部の接続部と、接続部に支持された第一腕部の基端部とを有している。アクチュエータは、接続部に固定されている。接続部にはアクチュエータが固定されているため、関節の支持強度を高めるために接続部を大きくすることは難しい。残念ながら、前記従来の多関節ロボットでは、関節の支持強度を高めることができない。
【課題を解決するための手段】
【0007】
ここに開示する技術は、多関節ロボットに関する。多関節ロボットは、
水平な第1軸が伸びる方向に並ぶ第1支持部と第1動作部とを有しかつ、前記第1動作部が、前記第1軸を中心に、前記第1支持部に対し相対回転する第1関節と、
第1本体と、前記第1本体から突出すると共に前記第1関節に接続された第1シャフトと、を有しかつ、前記第1シャフトを通じて前記第1関節を動かす第1アクチュエータであって、前記第1本体が、前記第1動作部を基準にして前記第1支持部とは逆側に位置する第1アクチュエータと、
前記第1関節に直列でかつ前記第1関節に支持された第2関節であって、第2支持部と前記第2支持部に支持された第2動作部とを有しかつ、前記第1軸に平行な第2軸を中心に、前記第2動作部が前記第2支持部に対し相対回転する第2関節と、
第2本体と、前記第2本体から突出すると共に前記第2関節に接続された第2シャフトと、を有しかつ、前記第2シャフトを通じて前記第2関節を動かす第2アクチュエータであって、前記第1軸又は前記第2軸が伸びる方向について、前記第2シャフトの突出する向きが前記第1シャフトの突出する向きとは逆である第2アクチュエータと、
を備える。
【発明の効果】
【0008】
前記多関節ロボットの第1関節は、第1アクチュエータを直接支持しないため、高い支持強度を持つことができる。
【図面の簡単な説明】
【0009】
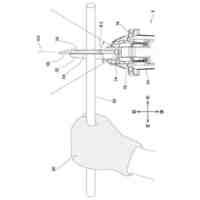
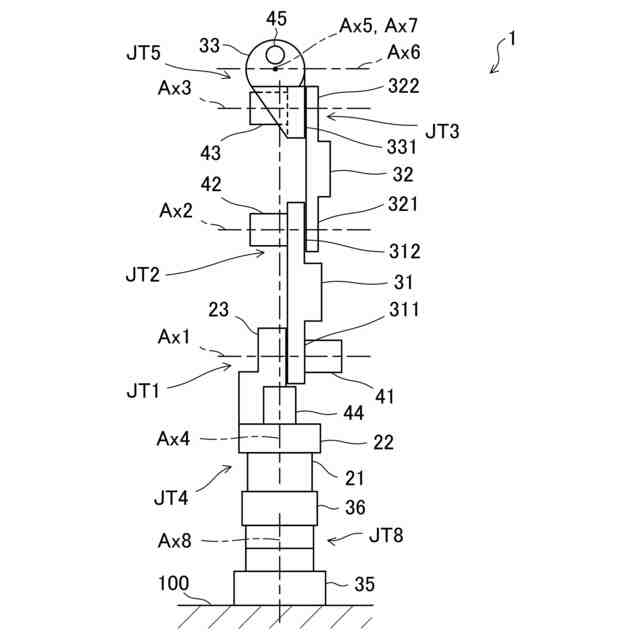
図1は、多関節ロボットの背面図である。
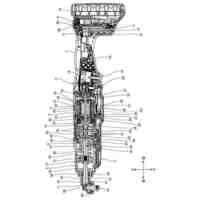
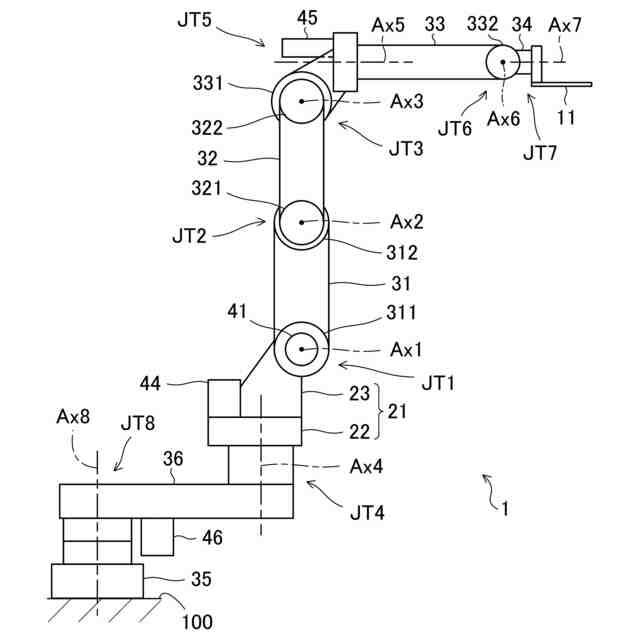
図2は、多関節ロボットの側面図である。
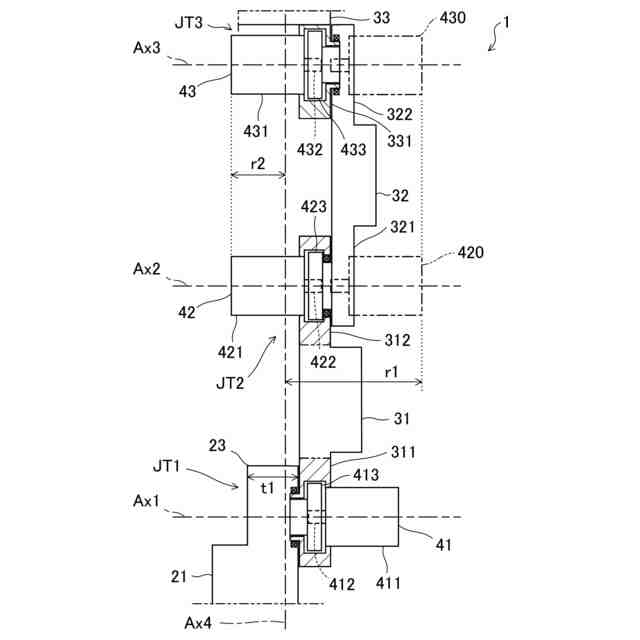
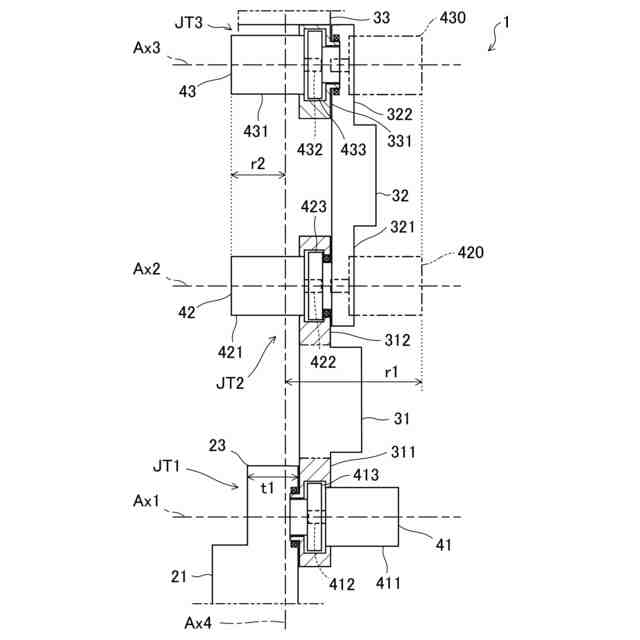
図3は、第1乃至第3関節と第1乃至第3アクチュエータとを拡大して示す、多関節ロボットを背後から観た部分断面図である。
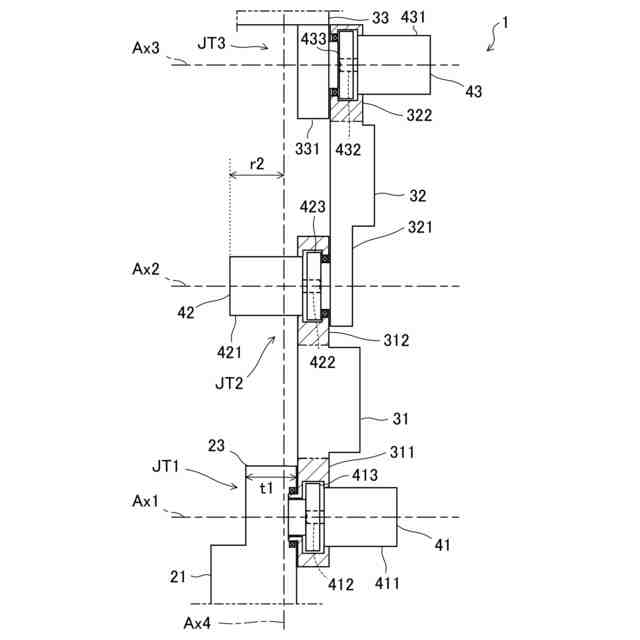
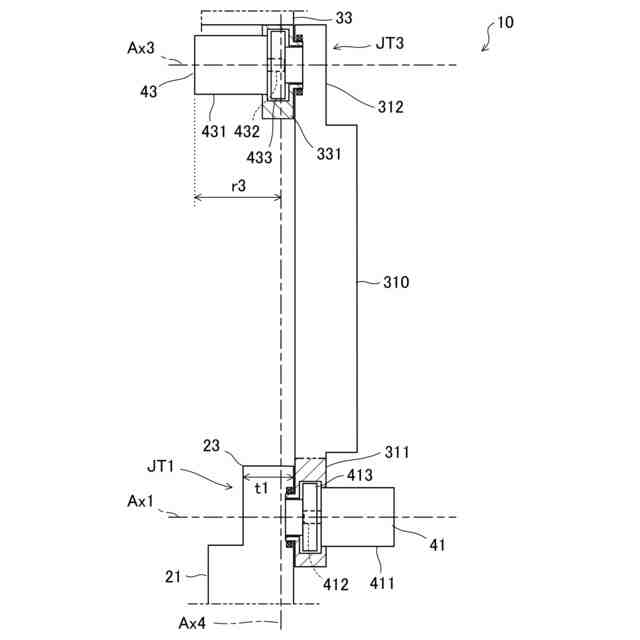
図4は、変形例に係る多関節ロボットを背後から観た部分断面図である。
図5は、変形例に係る多関節ロボットを背後から観た部分断面図である。
図6は、変形例に係る多関節ロボットを背後から観た部分断面図である。
【発明を実施するための形態】
【0010】
以下、多関節ロボットの実施形態について、図面を参照しながら説明する。ここで説明する多関節ロボットは例示である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
8日前
株式会社マキタ
電動工具
1日前
株式会社マキタ
電動工具
16日前
川崎重工業株式会社
ロボットリスト
16日前
川崎重工業株式会社
ロボットアーム
16日前
川崎重工業株式会社
ロボットアーム
16日前
日本車輌製造株式会社
締め付け工具
16日前
川崎重工業株式会社
ロボットシステム
16日前
日本信号株式会社
作業機制御システム
1日前
CKD株式会社
吸着型搬送装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
2日前
ジヤトコ株式会社
圧入装置
29日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社マキタ
集塵アタッチメント
1日前
株式会社スター精機
ワーク搬送装置
5日前
トヨタ自動車株式会社
制御装置及び制御方法
16日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
8日前
モトコマ株式会社
寄せポンチホルダー
17日前
有限会社松尾エンジニアリング
連結部材
17日前
個人
ターンバックル用工具
23日前
株式会社DailyColor
ロボットハンド
17日前
株式会社SHIN‐JIGEN
上肢アシスト装置
22日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
8日前
株式会社マキタ
作業機
29日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
バッテリ駆動式機器
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ