TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025015943
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023118867
出願日
2023-07-21
発明の名称
上肢アシスト装置
出願人
株式会社SHIN‐JIGEN
代理人
個人
主分類
B25J
11/00 20060101AFI20250124BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 荷物の持ち上げ動作の段階に応じた出力でアクチュエータが駆動されることにより、引張力を効率良くアシスト力として利用することが可能な上肢アシスト装置を提供する。
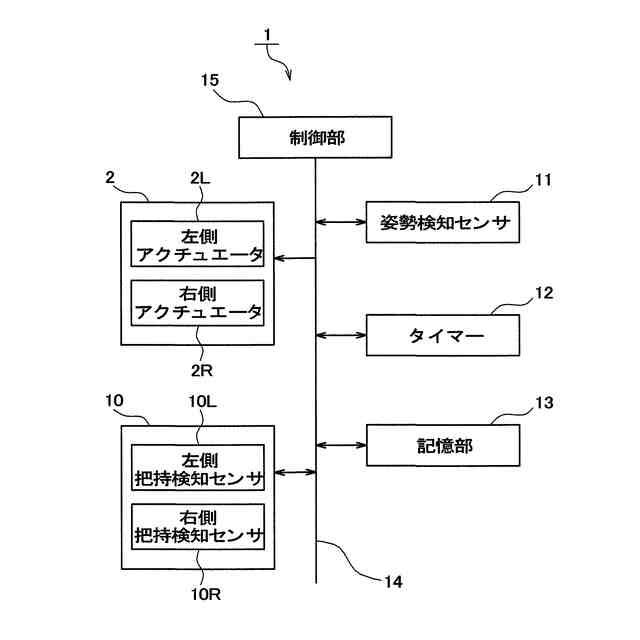
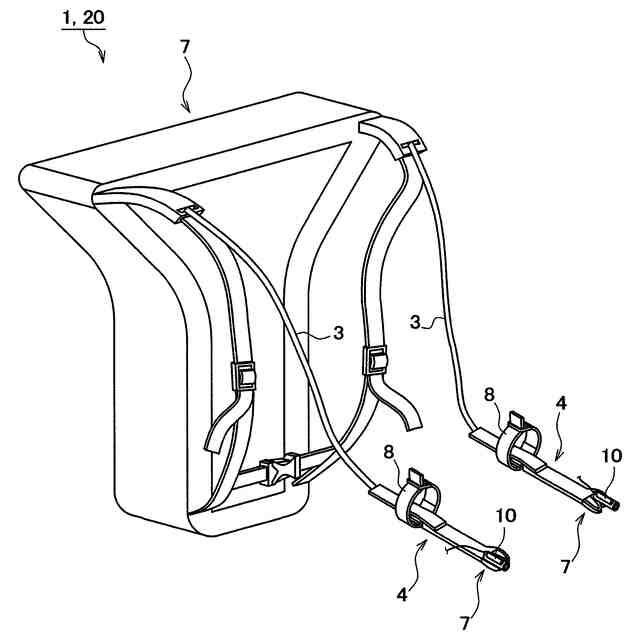
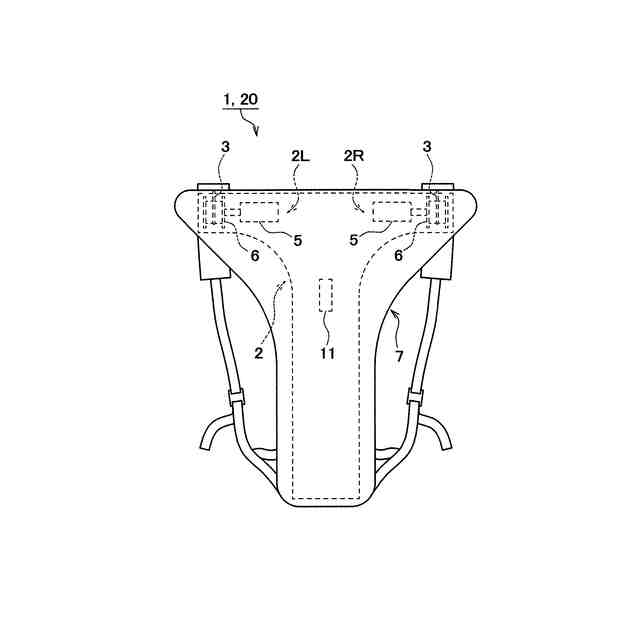
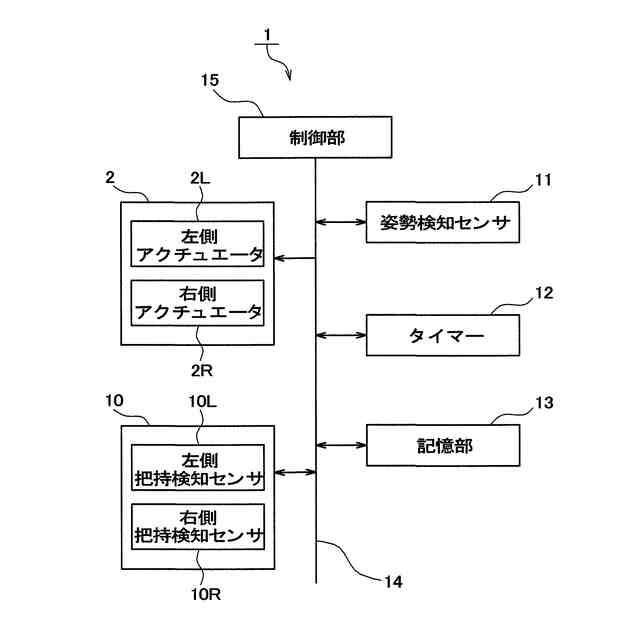
【解決手段】 本発明の上肢アシスト装置1は、使用者による荷物の持ち上げを支援するものであって、一端部が使用者の腕部に接続されたワイヤ3と、ワイヤ3の他端部に接続されて任意の出力でワイヤ3に引張力を伝達可能なアクチュエータ2と、荷物が使用者によって把持された把持状態か把持されていない解放状態かを検知可能な把持検知センサ10と、把持検知センサ10の検知結果に基づいてアクチュエータ2の出力を段階的に増加又は減少させる制御部15と、を備えている。
【選択図】 図3
特許請求の範囲
【請求項1】
使用者による荷物の持ち上げを支援する上肢アシスト装置であって、
一端部が使用者の腕部に接続されたワイヤと、
前記ワイヤの他端部に接続されて、任意の出力で前記ワイヤに引張力を伝達可能なアクチュエータと、
荷物が使用者によって把持された把持状態か把持されていない解放状態かを検知可能な把持検知センサと、
前記把持検知センサの検知結果に基づいて、前記アクチュエータの出力を段階的に増加又は減少させる制御部と、
を備えることを特徴とする上肢アシスト装置。
続きを表示(約 1,700 文字)
【請求項2】
前記制御部は、前記把持検知センサにより荷物が解放状態から把持状態になったことが検知されると、前記アクチュエータの出力を、第一出力から第二出力へ増加させ、その後に第二出力から第三出力へ更に増加させることを特徴とする請求項1に記載の上肢アシスト装置。
【請求項3】
使用者の体の傾きを検知可能な姿勢検知センサを更に備え、
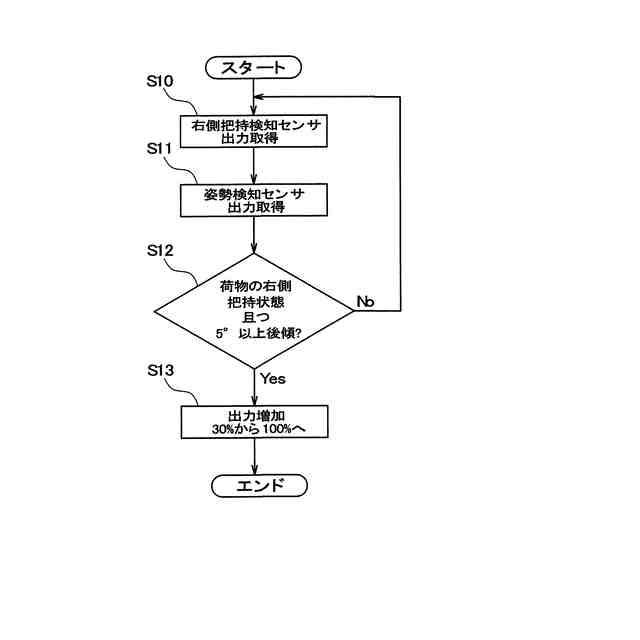
前記制御部は、前記把持検知センサにより荷物が解放状態から把持状態になったことが検知された時に、使用者の体が鉛直方向よりも第一角度を超えて前傾していることが前記姿勢検知センサにより検知されると、床からの荷物の持ち上げとして床上荷物モードを選択する一方、使用者の体が鉛直方向よりも第一角度を超えて前傾していないことが前記姿勢検知センサにより検知されると、台上からの荷物の持ち上げとして台上荷物モードを選択することを特徴とする請求項2に記載の上肢アシスト装置。
【請求項4】
前記制御部は、前記床上荷物モードを選択した場合、前記把持検知センサにより荷物が解放状態から把持状態になったことが検知された時から使用者の体が第二角度だけ後傾したことが前記姿勢検知センサにより検知されると、前記アクチュエータの出力を前記第二出力から前記第三出力へ増加させることを特徴とする請求項3に記載の上肢アシスト装置。
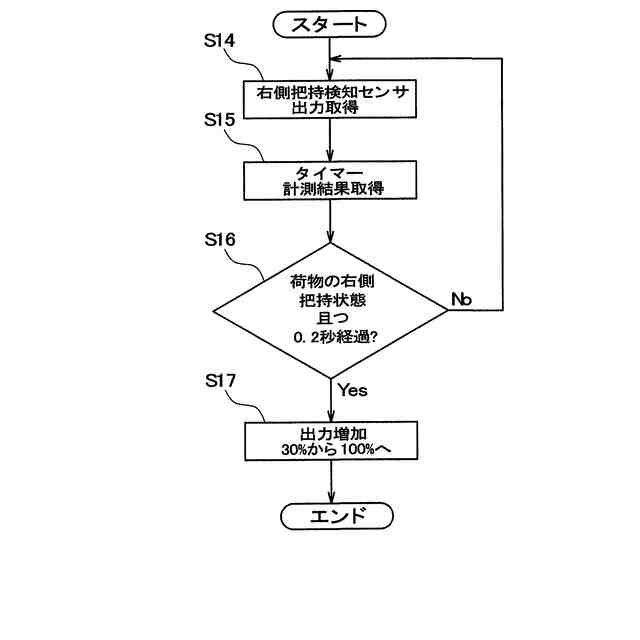
【請求項5】
経過時間を計測可能なタイマーを更に備え、
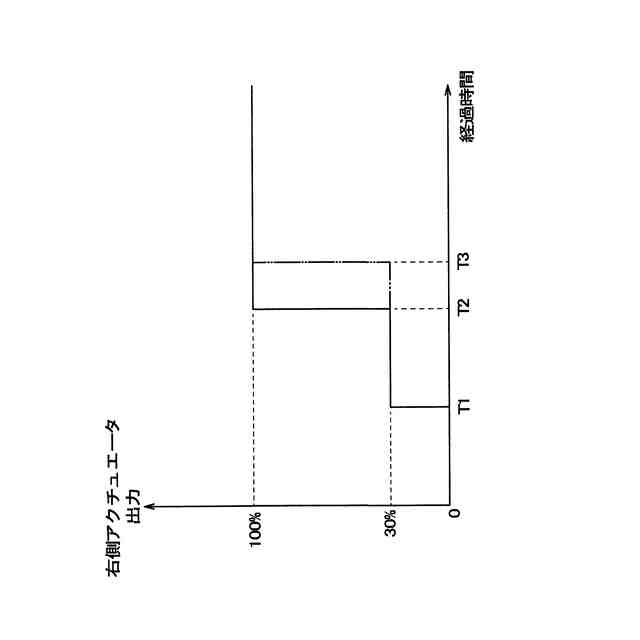
前記制御部は、前記台上荷物モードを選択した場合、前記把持検知センサにより荷物が解放状態から把持状態になったことが検知された時から第一時間だけ経過したことが前記タイマーにより検知されると、前記アクチュエータの出力を前記第二出力から前記第三出力へ増加させることを特徴とする請求項3に記載の上肢アシスト装置。
【請求項6】
前記把持検知センサが、使用者の左腕側と右腕側にそれぞれ設けられ、
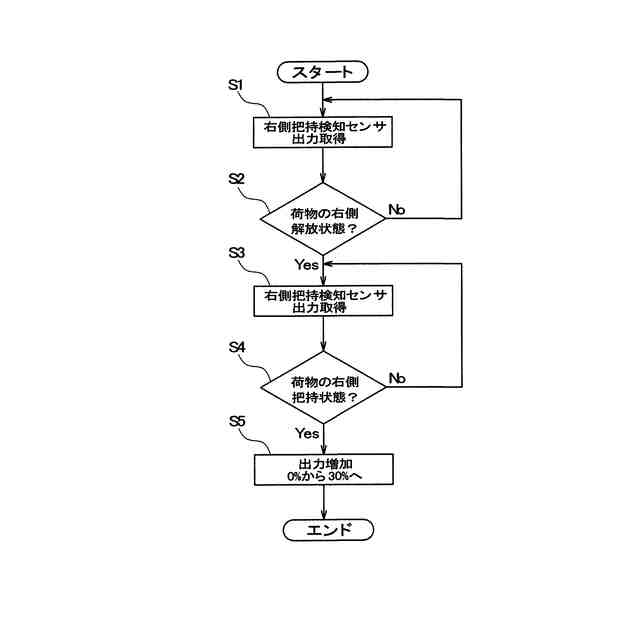
前記制御部は、使用者の左腕側と右腕側の両側の前記把持検知センサにより荷物が解放状態から把持状態になったことが検知されると、前記アクチュエータの出力を、前記第一出力から前記第二出力へ増加させることを特徴とする請求項2から5の何れか一項に記載の上肢アシスト装置。
【請求項7】
使用者の体の傾きを検知可能な姿勢検知センサを更に備え、
前記制御部は、前記把持検知センサにより荷物が把持状態であることが検知されている間に、使用者の体が第三角度だけ前傾したことが前記姿勢検知センサにより検知されると、前記アクチュエータの出力を、第四出力から第五出力へ減少させ、その後に前記把持検知センサにより荷物が把持状態から解放状態になったことが検知されると、前記アクチュエータの出力を、第六出力へ更に減少させることを特徴とする請求項1に記載の上肢アシスト装置。
【請求項8】
前記制御部は、使用者の体が第三角度だけ前傾したことが前記姿勢検知センサにより検知されてから、前記把持検知センサにより荷物が把持状態から解放状態になったことが検知されるまでの間に、前記アクチュエータの出力を、前記第五出力から徐々に減少させて前記第六出力より大きい第七出力とすることを特徴とする請求項7に記載の上肢アシスト装置。
【請求項9】
前記制御部は、前記把持検知センサにより荷物が把持状態であることが検知されている間に、使用者の体が第三角度だけ前傾した後に、第四角度だけ後傾したことが前記姿勢検知センサにより検知されると、前記アクチュエータの出力を、第八出力へ増加させることを特徴とする請求項7又は8に記載の上肢アシスト装置。
【請求項10】
前記把持検知センサが、使用者の左腕側と右腕側にそれぞれ設けられ、
前記制御部は、使用者の左腕側と右腕側の両側の前記把持検知センサにより荷物が把持状態から解放状態になったことが検知されると、前記アクチュエータの出力を、前記第六出力へ減少させることを特徴とする請求項7又は8に記載の上肢アシスト装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、使用者による荷物の持ち上げを支援する上肢アシスト装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、使用者による荷物の持ち上げ動作を支援する上肢アシスト装置が広く開発されている。この上肢アシスト装置にはワイヤが接続され、このワイヤの先端部に設けられたエンドエフェクタと呼ばれる部材が使用者の腕に装着される。これにより、上肢アシスト装置で発生したアクチュエータの駆動力が、ワイヤ及びエンドエフェクタを介して使用者の腕に引張力として伝達される(例えば、特許文献1を参照)。
【0003】
ここで、使用者の腕に引張力を伝達するタイミングを図るため、荷物が使用者によって把持された把持状態か把持されていない解放状態かを検知可能な把持検知センサが、例えばエンドエフェクタに装備されている。そして、荷物が解放状態から把持状態になったことが把持検知センサによって検知されると、アクチュエータの動作を制御する制御部が、アクチュエータを最大出力で駆動する。一方、荷物が把持状態から解放状態になったことが把持検知センサによって検知されると、制御部がアクチュエータの駆動を停止する。これにより、使用者が荷物を把持している間だけ、その腕に引張力が伝達されるようになっている。
【先行技術文献】
【特許文献】
【0004】
特開2021-094650号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来の上肢アシスト装置では、使用者の腕に伝達される引張力が、荷物の持ち上げ動作を支援するアシスト力として効率良く利用されないという問題があった。すなわち、使用者が必要とするアシスト力の大きさは、荷物の持ち上げ動作の段階によって異なっている。しかし、従来の上肢アシスト装置では、制御部がアクチュエータを最大出力で駆動するか停止するかの何れかであるため、使用者が荷物を持ち上げてから降ろすまでの段階によっては、不必要に大きい引張力が使用者の腕に作用し、使用者がその引張力の全てをアシスト力として利用することができないという問題があった。
【0006】
そこで本発明は、かかる事情に鑑みて創案され、その目的は、荷物の持ち上げ動作の段階に応じた出力でアクチュエータが駆動されることにより、引張力を効率良くアシスト力として利用することが可能な上肢アシスト装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明の一の態様に係る上肢アシスト装置は、使用者による荷物の持ち上げを支援する上肢アシスト装置であって、一端部が使用者の腕部に接続されたワイヤと、前記ワイヤの他端部に接続されて、任意の出力で前記ワイヤに引張力を伝達可能なアクチュエータと、荷物が使用者によって把持された把持状態か把持されていない解放状態かを検知可能な把持検知センサと、前記把持検知センサの検知結果に基づいて、前記アクチュエータの出力を段階的に増加又は減少させる制御部と、を備えることを特徴としている。
【0008】
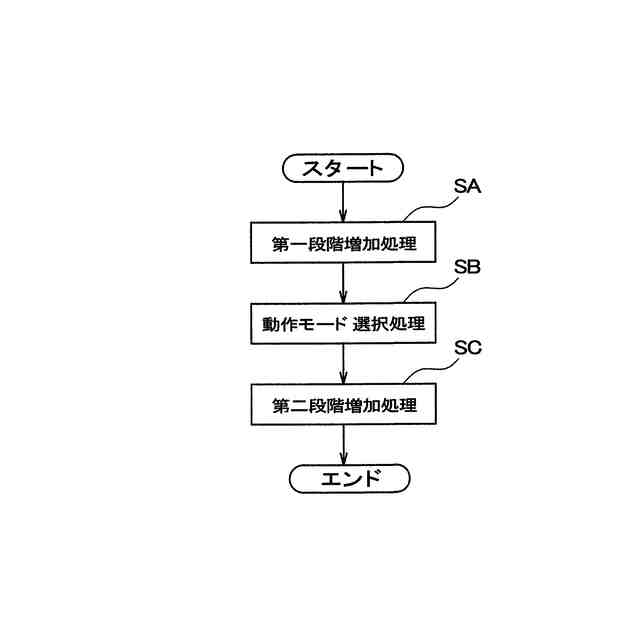
なお、本発明の一の態様に係る上肢アシスト装置においては、前記制御部は、前記把持検知センサにより荷物が解放状態から把持状態になったことが検知されると、前記アクチュエータの出力を、第一出力から第二出力へ増加させ、その後に第二出力から第三出力へ更に増加させてもよい。
【0009】
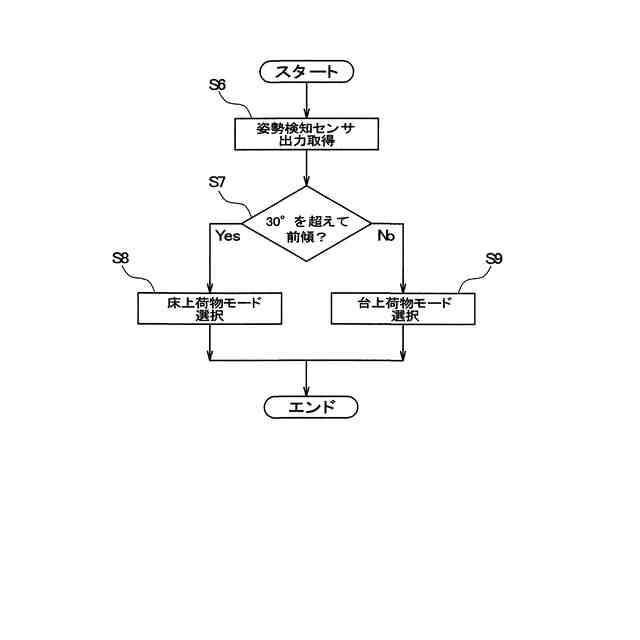
また、本発明の一の態様に係る上肢アシスト装置においては、使用者の体の傾きを検知可能な姿勢検知センサを更に備え、前記制御部は、前記把持検知センサにより荷物が解放状態から把持状態になったことが検知された時に、使用者の体が鉛直方向よりも第一角度を超えて前傾していることが前記姿勢検知センサにより検知されると、床からの荷物の持ち上げとして床上荷物モードを選択する一方、使用者の体が鉛直方向よりも第一角度を超えて前傾していないことが前記姿勢検知センサにより検知されると、台上からの荷物の持ち上げとして台上荷物モードを選択してもよい。
【0010】
また、本発明の一の態様に係る上肢アシスト装置においては、前記制御部は、前記床上荷物モードを選択した場合、前記把持検知センサにより荷物が解放状態から把持状態になったことが検知された時から使用者の体が第二角度だけ後傾したことが前記姿勢検知センサにより検知されると、前記アクチュエータの出力を前記第二出力から前記第三出力へ増加させてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
19日前
株式会社エビス
連結具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
3か月前
株式会社マキタ
電動工具
12日前
株式会社マキタ
電動工具
27日前
株式会社マキタ
ハンマドリル
3か月前
川崎重工業株式会社
ロボット
2か月前
日本車輌製造株式会社
締め付け工具
27日前
川崎重工業株式会社
ロボットアーム
27日前
川崎重工業株式会社
ロボットアーム
27日前
川崎重工業株式会社
ロボットリスト
27日前
川崎重工業株式会社
ロボット
2か月前
株式会社ケー・エフ・シー
締結構造
2日前
川崎重工業株式会社
ロボットシステム
27日前
日本信号株式会社
作業機制御システム
12日前
CKD株式会社
吸着型搬送装置
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
13日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社アイエイアイ
グリッパー
3か月前
長堀工業株式会社
締結装置
1か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社マキタ
集塵アタッチメント
12日前
株式会社スター精機
ワーク搬送装置
16日前
トヨタ自動車株式会社
把持装置、把持方法
6日前
川崎重工業株式会社
ロボットシステム
19日前
工機ホールディングス株式会社
作業機
2か月前
モトコマ株式会社
寄せポンチホルダー
28日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































