TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024172520
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090296
出願日
2023-05-31
発明の名称
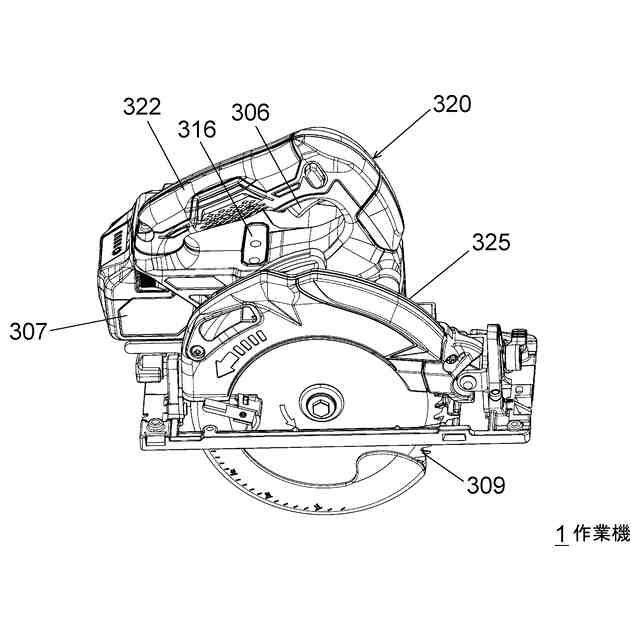
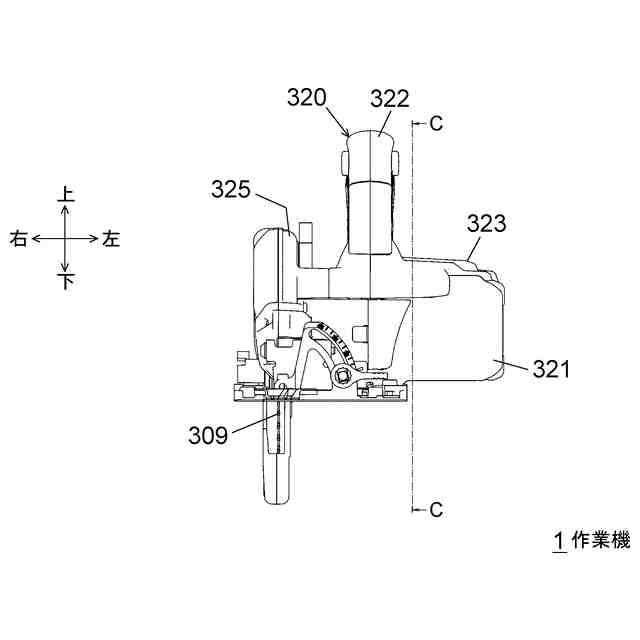
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25F
5/00 20060101AFI20241205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】使い勝手の良い作業機を提供する。
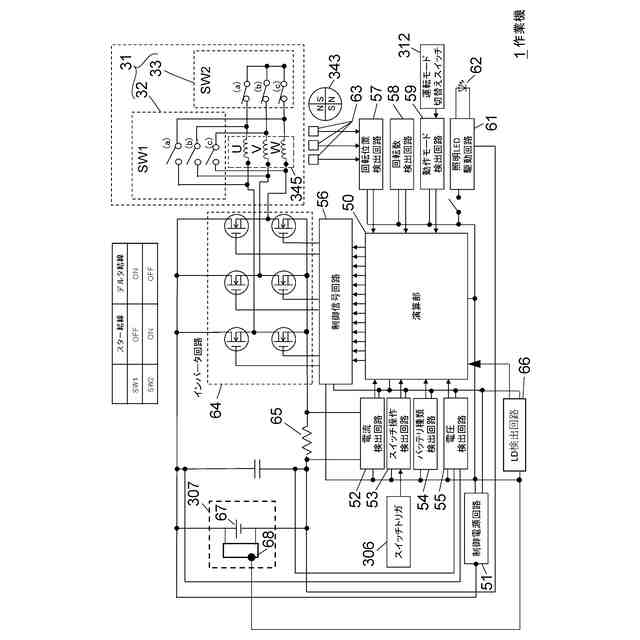
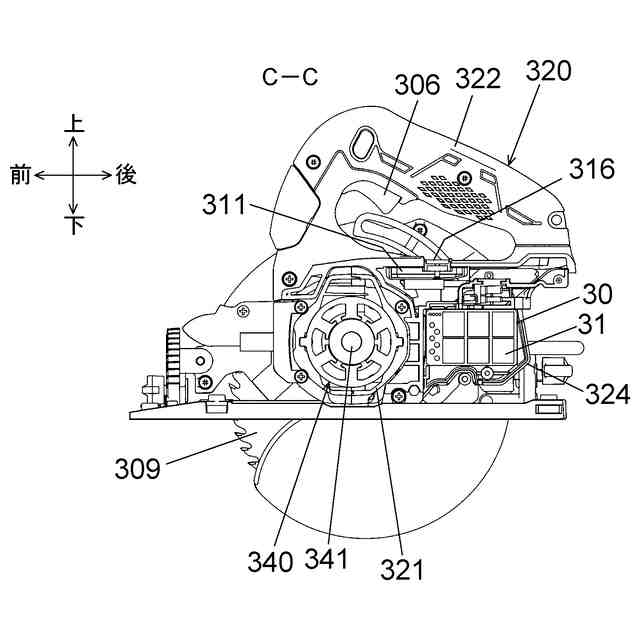
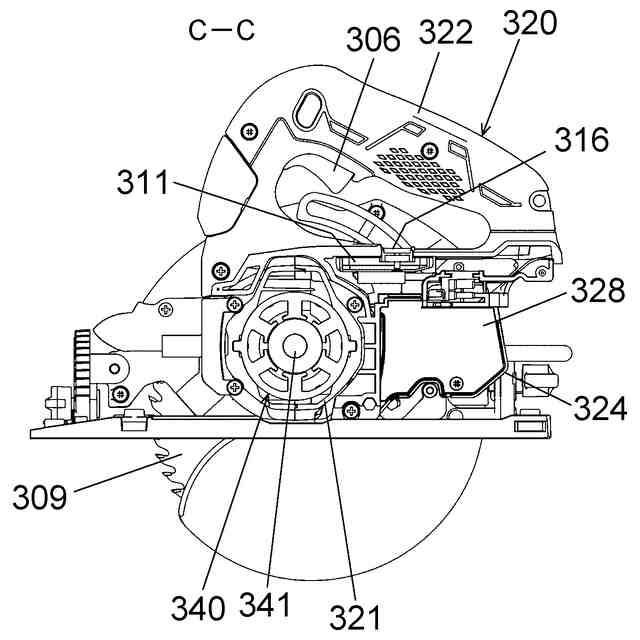
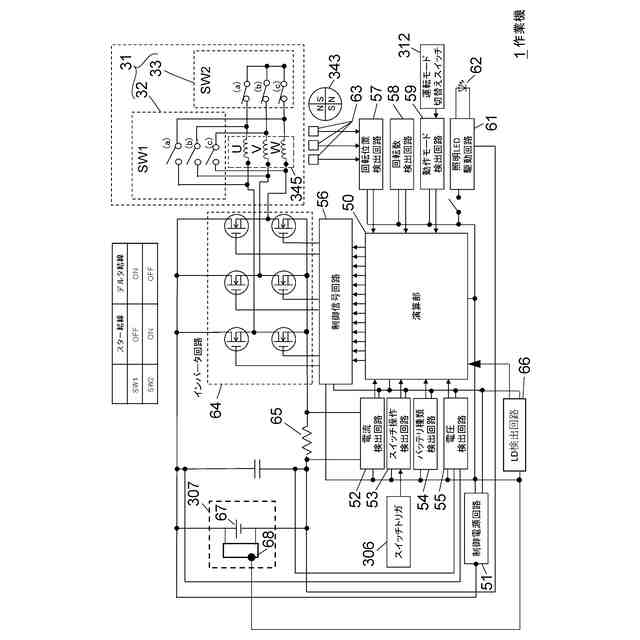
【解決手段】作業機1は、ステータコイル345を高回転数特性となるよう互いに接続する高回転モードと、ステータコイル345を高トルク特性となるよう互いに接続する高トルクモードと、を切替え可能に構成されたリレー素子31を備える。演算部50は、モータ電流に関する第1条件を満たすと、高回転モードから高トルクモードに切り替え、モータ電流に関する第2条件を満たすと、高トルクモードから高回転モードに切り替える。演算部50は、高回転モードから高トルクモードに切り替えてから、第3条件を満たすまでは、第2条件を満たした場合でも高トルクモードを維持するよう構成される。高回転モードから高トルクモードに切り替えた直後に一時的にモータ電流が小さい期間が生じても高回転モードに戻らないようにするための条件である。
【選択図】図8
特許請求の範囲
【請求項1】
複数の巻線を有するモータと、
前記モータを駆動する駆動部と、
前記複数の巻線を高回転数特性となるよう互いに接続する高回転モードと、前記複数の巻線を高トルク特性となるよう互いに接続する高トルクモードと、を切替え可能に構成された結線切替部と、
前記駆動部及び前記結線切替部を制御する制御部と、
を備えた作業機であって、
前記制御部は、
前記モータに流れる電流に関する第1条件を満たすと、前記高回転モードから前記高トルクモードに切り替え、
前記モータに流れる電流に関する第2条件を満たすと、前記高トルクモードから前記高回転モードに切り替え、
前記高回転モードから前記高トルクモードに切り替えてから、第3条件を満たすまでは、前記第2条件を満たした場合でも前記高トルクモードを維持するよう構成された、
ことを特徴とする作業機。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の作業機であって、
前記第1条件は、前記モータに流れる電流が第1電流閾値以上の状態が第1時間閾値以上継続することを含み、
前記第2条件は、前記モータに流れる電流が前記第1電流閾値より小さい第2電流閾値以下の状態が第2時間閾値以上継続することを含み、
前記第3条件は、前記第2時間閾値よりも長い時間が経過することを含む、
ことを特徴とする作業機。
【請求項3】
請求項1に記載の作業機であって、
前記第2条件は、前記モータに流れる電流が第2電流閾値以下になることを含み、
前記第3条件は、前記モータに流れる電流が第3電流閾値以上であることを含む、
ことを特徴とする作業機。
【請求項4】
請求項1に記載の作業機であって、
前記第3条件は、予め設定された一定の時間が経過すること、又は、前記モータの回転数が所定回転数以下であること、を含む、
ことを特徴とする作業機。
【請求項5】
請求項4に記載の作業機であって、
前記第2条件は、前記モータに流れる電流が第2電流閾値以下になることを含み、
前記所定回転数は、前記高トルクモードにおいて前記モータに流れる電流が第3電流閾値である場合に対応する回転数である、
ことを特徴とする作業機。
【請求項6】
複数の巻線を有するモータと、
前記モータを駆動する駆動部と、
前記複数の巻線を高回転数特性となるよう互いに接続する高回転モードと、前記複数の巻線を高トルク特性となるよう互いに接続する高トルクモードと、を切替え可能に構成された結線切替部と、
前記モータに加わる負荷に関する第1条件を満たすと、前記高回転モードから前記高トルクモードに切り替えるよう構成された制御部と、
を備えた作業機であって、
前記制御部は、前記高回転モードから前記高トルクモードに切り替えた後に、前記モータに加わる負荷に関する条件であって前記第1条件と異なる第2条件と、前記第1条件及び前記第2条件と異なる第3条件と、を満たすと、前記高トルクモードから前記高回転モードに切り替えるよう構成された、
ことを特徴とする作業機。
【請求項7】
請求項6に記載の作業機であって、
前記第1条件は、前記負荷が第1負荷閾値以上の状態が第1時間閾値以上継続することを含み、
前記第2条件は、前記負荷が前記第1負荷閾値より小さい第2負荷閾値以下の状態が第2時間閾値以上継続することを含み、
前記第3条件は、前記第2時間閾値よりも長い時間が経過することを含む、
ことを特徴とする作業機。
【請求項8】
請求項6に記載の作業機であって、
前記第3条件は、所定時間が経過すること、及び/又は、前記モータの回転数が所定回転数以下であることを含む、
ことを特徴とする作業機。
【請求項9】
請求項6に記載の作業機であって、
前記第2条件は、前記負荷が第2負荷閾値以下になることを含み、
前記第3条件は、前記負荷が第3負荷閾値以上であることを含み、
前記制御部は、前記高回転モードから前記高トルクモードに切り替えた後、かつ前記第3条件を満たした後に、前記第2条件を満たすと、前記高トルクモードから前記高回転モードに切り替えるよう構成された、
ことを特徴とする作業機。
【請求項10】
請求項6に記載の作業機であって、
前記第3条件は、予め設定された一定の時間が経過することを含む、
ことを特徴とする作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1は、モータの巻線の結線を負荷に応じて高回転巻線と高トルク巻線との間で切替え可能であり、巻線切替閾値を変更可能な電動工具を開示する。
【先行技術文献】
【特許文献】
【0003】
特開2022-157786号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
モータの結線を高回転巻線から高トルク巻線に切り替える際、切り替えた直後に慣性によってモータの回転数が高い状態に維持されていると、高トルク巻線での駆動開始時に瞬間的に電流がほとんど流れない時間が発生することがある。当該時間における電流値が、高トルク巻線から高回転巻線に切り替える電流閾値以下の場合、高トルク巻線での駆動直後に高回転巻線に戻ってしまい、使い勝手が悪い。すなわち、高トルク巻線での駆動直後に高回転巻線に戻り、高回転結線に戻った後は切替閾値に達しているためまたすぐに高トルク結線に切り替わる。これが短い時間で繰り返し発生してしまい、不要な切替が頻発することでスイッチング素子の寿命を縮めてしまう。一方で高トルク結線から高回転結線に切り替える閾値を厳しくしてしまうと高回転結線に戻りにくくなり、使い勝手が悪くなる。
【0005】
本発明の目的は、使い勝手の良い作業機を提供することである。
【課題を解決するための手段】
【0006】
本発明のある態様は、作業機である。この作業機は、
複数の巻線を有するモータと、
前記モータを駆動する駆動部と、
前記複数の巻線を高回転数特性となるよう互いに接続する高回転モードと、前記複数の巻線を高トルク特性となるよう互いに接続する高トルクモードと、を切替え可能に構成された結線切替部と、
前記駆動部及び前記結線切替部を制御する制御部と、
を備えた作業機であって、
前記制御部は、
前記モータに流れる電流に関する第1条件を満たすと、前記高回転モードから前記高トルクモードに切り替え、
前記モータに流れる電流に関する第2条件を満たすと、前記高トルクモードから前記高回転モードに切り替え、
前記高回転モードから前記高トルクモードに切り替えてから、第3条件を満たすまでは、前記第2条件を満たした場合でも前記高トルクモードを維持するよう構成された、
ことを特徴とする。
【0007】
本発明の別の態様は、作業機である。この作業機は、
複数の巻線を有するモータと、
前記モータを駆動する駆動部と、
前記複数の巻線を高回転数特性となるよう互いに接続する高回転モードと、前記複数の巻線を高トルク特性となるよう互いに接続する高トルクモードと、を切替え可能に構成された結線切替部と、
前記モータに加わる負荷に関する第1条件を満たすと、前記高回転モードから前記高トルクモードに切り替えるよう構成された制御部と、
を備えた作業機であって、
前記制御部は、前記高回転モードから前記高トルクモードに切り替えた後に、前記モータに加わる負荷に関する条件であって前記第1条件と異なる第2条件と、前記第1条件及び前記第2条件と異なる第3条件と、を満たすと、前記高トルクモードから前記高回転モードに切り替えるよう構成された、
ことを特徴とする。
【0008】
本発明の別の態様は、作業機である。この作業機は、
複数の巻線を有するモータと、
前記モータを駆動する駆動部と、
前記複数の巻線を高回転数特性となるよう互いに接続する高回転モードと、前記複数の巻線を高トルク特性となるよう互いに接続する高トルクモードと、を切替え可能に構成された結線切替部と、
前記駆動部及び前記結線切替部を制御する制御部と、
を備えた作業機であって、
前記制御部は、
前記モータに流れる電流に関する第1条件を満たすと、前記高回転モードから前記高トルクモードに切り替え、
前記モータに流れる電流に関する第2条件を満たすと、前記高トルクモードから前記高回転モードに切り替え、
前記高回転モードから前記高トルクモードに切り替える場合、前記高回転モードでの前記モータへの通電を停止後、第3条件を満たした場合に、前記高トルクモードでの前記モータへの通電を開始するよう構成された、
ことを特徴とする。
【0009】
本発明は「電動作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0010】
本発明によれば、使い勝手の良い作業機を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイセイ
搬送装置
今日
国立大学法人金沢大学
ロボット
6日前
アピュアン株式会社
衝撃工具
1日前
株式会社マキタ
電動工具
今日
株式会社マキタ
作業機
6日前
株式会社マキタ
作業機
6日前
株式会社マキタ
作業機
6日前
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
電動工具
今日
株式会社マキタ
打ち込み工具
今日
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
今日
マックス株式会社
ステープル取り外し装置
今日
川崎重工業株式会社
動作軌跡生成方法および動作軌跡生成装置
今日
マックス株式会社
ステープル取り外し装置
今日
川崎重工業株式会社
ロボットシステム、および、画像処理方法
今日
大日本印刷株式会社
ロボット
今日
キヤノン株式会社
ロボットシステムおよび製造方法
今日
トヨタ自動車株式会社
ロボット制御装置、ロボット制御方法、及びプログラム
今日
川崎重工業株式会社
ロボットシステムおよびロボットシステムの監視方法
今日
株式会社マキタ
ドライバドリル及び震動ドライバドリル
今日
パナソニックIPマネジメント株式会社
吸着ハンド及びロボット装置
今日
トヨタ自動車株式会社
ピッキングシステム、ピッキングロボット、及びピッキング方法
今日
株式会社神戸製鋼所
衝突予測方法、衝突予測装置、および溶接システム
6日前
オムロン株式会社
ロボットを制御するシステム、方法およびプログラム
今日
株式会社安川電機
ロボットシステム及びロボット制御方法
6日前
株式会社安川電機
ロボット制御システム、ロボットコントローラ、及びロボット制御方法
今日
ニデックドライブテクノロジー株式会社
ねじ締め装置、ねじ締め装置の制御システム、および複数のねじ締め装置の制御方法
今日
ファナック アメリカ コーポレイション
遠隔工具中心点フレームにおけるロボットのリアルタイム経路トラッキング
2日前
キヤノン株式会社
ロボットシステム、ロボットシステムの制御方法、移動装置、移動装置の制御方法、物品の製造方法、制御プログラム及び記録媒体
今日
イーライ リリー アンド カンパニー
即効型インスリン組成物
2日前
他の特許を見る





 特許ウォッチ
特許ウォッチ