TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035205
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142101
出願日
2023-09-01
発明の名称
ロボットシステム、ロボットシステムの制御方法、移動装置、移動装置の制御方法、物品の製造方法、制御プログラム及び記録媒体
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 電力の消費を低減しつつロボットシステムにおける状態に関する情報を検出する。
【解決手段】 ロボットと、前記ロボットを搭載することが可能な移動装置と、を備えたロボットシステムであって、少なくとも2つのセンサを有しており、前記ロボットに関する情報に基づき、前記少なくとも2つのセンサにおいて電気駆動するセンサを選択する、ことを特徴とするロボットシステム。
【選択図】 図6
特許請求の範囲
【請求項1】
ロボットと、前記ロボットを搭載することが可能な移動装置と、を備えたロボットシステムであって、
少なくとも2つのセンサを有しており、
前記ロボットに関する情報に基づき、前記少なくとも2つのセンサにおいて電気駆動するセンサを選択する、
ことを特徴とするロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のロボットシステムにおいて、
前記ロボットに関する情報は、前記ロボットの位置または姿勢に関する情報である、
ことを特徴とするロボットシステム。
【請求項3】
請求項1または2に記載のロボットシステムにおいて、
前記移動装置を移動させている場合の前記ロボットの姿勢に関する情報に基づき、前記少なくとも2つのセンサにおいて電気駆動するセンサを選択する、
ことを特徴とするロボットシステム。
【請求項4】
請求項1から3のいずれか1項に記載のロボットシステムにおいて、
前記移動装置を移動させている場合に、前記少なくとも2つのセンサにおいて電気駆動するセンサを選択する、
ことを特徴とするロボットシステム。
【請求項5】
請求項1から4のいずれか1項に記載のロボットシステムにおいて、
前記移動装置における前記ロボットの載置面に基づき設定された領域と前記ロボットに関する情報とに基づき、前記少なくとも2つのセンサにおいて電気駆動するセンサを選択する、
ことを特徴とするロボットシステム。
【請求項6】
請求項1から5のいずれか1項に記載のロボットシステムにおいて、
前記移動装置に設けられたエリアセンサの範囲に基づき設定された領域と前記ロボットに関する情報とに基づき、前記少なくとも2つのセンサにおいて電気駆動するセンサを選択する、
ことを特徴とするロボットシステム。
【請求項7】
請求項5または6に記載のロボットシステムにおいて、
前記少なくとも2つのセンサにおいて前記領域から突出した部位に関する情報を取得できるセンサを電気駆動させる、
ことを特徴とするロボットシステム。
【請求項8】
請求項1から7のいずれか1項に記載のロボットシステムにおいて、
前記移動装置の移動方向に基づき、前記少なくとも2つのセンサにおいて電気駆動する前記センサを選択する、
ことを特徴とするロボットシステム。
【請求項9】
請求項1から8のいずれか1項に記載のロボットシステムにおいて、
独立した3方向において前記ロボットにかかる負荷に関する情報を取得できるセンサを電気駆動させる、
ことを特徴とするロボットシステム。
【請求項10】
請求項1から9のいずれか1項に記載のロボットシステムにおいて、
前記移動装置の移動方向において前記ロボットにかかる負荷を取得できるセンサを電気駆動させる、
ことを特徴とするロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット、移動装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、ロボットを移動架台に搭載させたロボットシステムを複数の作業位置に移動させることで、部品の組立作業、部品の検査作業、部品の加工作業などの複数の作業工程に対応することを可能とし、生産工場作業員の負荷軽減や要員削減などが図られている。この種のロボットシステムでは、ユーザが、作業対象が置かれた固定架台(作業台)へ向かって移動架台を移動させ、ロボットに作業を行わせる。移動架台にロボットを搭載して移動可能に構成されるロボットシステムにおいては、ユーザがロボットまたは移動架台と接触したり、ユーザが移動架台を固定架台または周辺設備に接触させたりする可能性がある。このような場合、ロボットシステムにとっての異常となる接触の有無を検出できるロボットシステムが好まれる。下記特許文献1では、ロボットに力センサを設け、力センサによりロボットとの接触を検出するようにした装置が知られている。さらに、ロボットの基端部に備えた第1力センサと、ロボット先端部に備えた第2の力センサの複数によって外部環境との接触を推定できるようにしている。
【先行技術文献】
【特許文献】
【0003】
特開2013-94935号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のようなロボットシステムは、ユーザによる動かしやすさを向上させるために、移動架台の内部に設置したバッテリーで、搭載したロボットを駆動させる場合が多い。そのため、外部環境とロボットとの接触を検出するために移動架台のセンサを常に電源を入れている状態にすると、搭載したバッテリーの容量では電力が不足する可能性がある。
【0005】
そこで、電力の消費を低減しつつロボットシステムにおける状態に関する情報を検出する。
【課題を解決するための手段】
【0006】
本発明は、ロボットと、前記ロボットを搭載することが可能な移動装置と、を備えたロボットシステムであって、少なくとも2つのセンサを有しており、前記ロボットに関する情報に基づき、前記少なくとも2つのセンサにおいて電気駆動するセンサを選択する、ことを特徴とするロボットシステムを採用した。
【発明の効果】
【0007】
本発明によれば、電力の消費を低減しつつロボットシステムにおける状態に関する情報を検出することができる。
【図面の簡単な説明】
【0008】
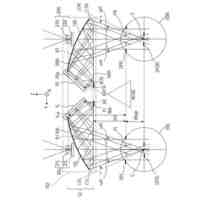
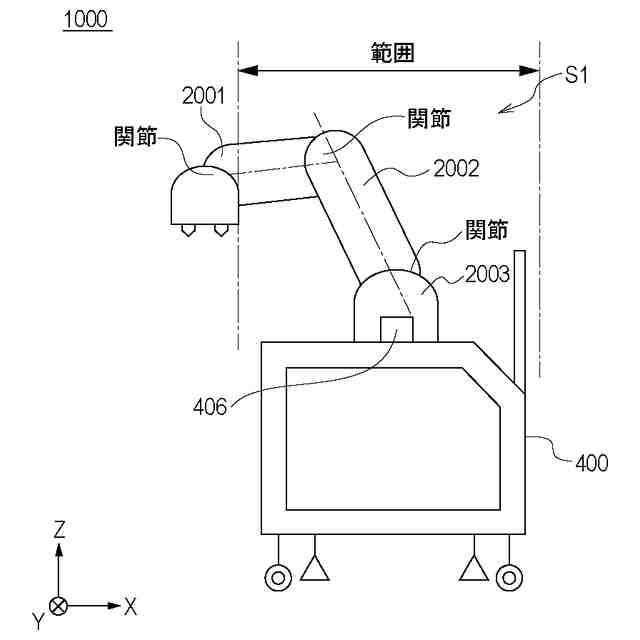
実施形態におけるロボットシステム1000を示す図である。
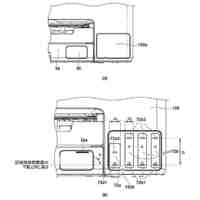
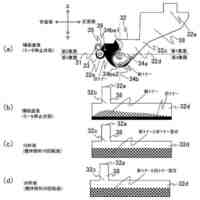
実施形態における移動架台400と固定架台700とを示す図である。
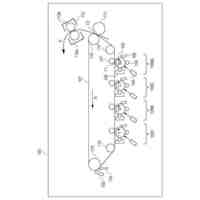
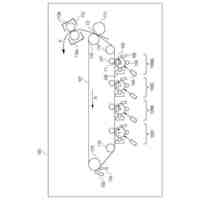
実施形態におけるロボットシステム1000の概略図である。
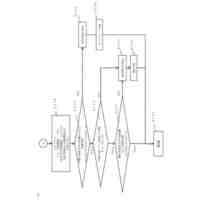
実施形態におけるロボットシステム1000の制御ブロック図である。
実施形態におけるロボットシステム1000の制御ブロック図である。
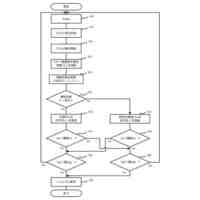
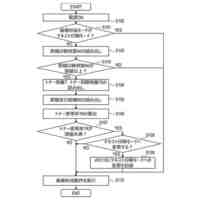
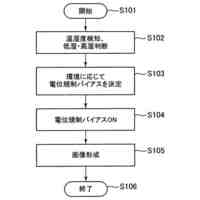
実施形態における制御フローチャートである。
実施形態における移動架台400と固定架台700とを示す図である。
実施形態におけるロボットシステム1000を示す図である。
実施形態におけるロボットシステム1000を示す図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して本発明を実施するための形態について説明する。なお、以下に示す実施形態はあくまでも一例であり、例えば細部の構成については本発明の趣旨を逸脱しない範囲において当業者が適宜変更することができる。また、本実施形態で取り上げる数値は、参考数値であって、本発明を限定するものではない。なお以下の図面において、図中の矢印X、Y、Zはロボットシステムの全体の座標系を示す。一般に、XYZ3次元座標系は、設置環境全体のワールド座標系を示す。その他、制御の都合などによって、ロボットハンド、指部、関節などに関して適宜ローカル座標系を用いる場合がある。
【0010】
(第1の実施形態)
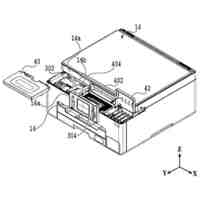
図1は本実施形態における移動可能なロボットシステム1000の斜視図である。図1よりロボットシステム1000は、ロボットアーム200と移動架台400とを備えている。移動架台400は移動装置と呼称する場合がある。移動架台400の上面(搭載面)には、多関節のロボットであるロボットアーム200が設置されており、移動架台400の下面には、移動架台400を移動させるための車輪401が設けられている。車輪401が床面(または地面)に接地した状態で、ハンドル403をユーザが操作することで、移動架台400を任意の位置に移動させることができ、もってロボットアーム200を任意の位置に移動させることが可能となる。ハンドル403を操作部と呼称する場合がある。ハンドル403は、ユーザが扱いやすい高さに調節可能としても構わない。また、ロボットアーム200の動作への影響を低減するようにハンドル403を移動架台400に収納できるようにしても構わない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
表示装置
1日前
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
記録装置
7日前
キヤノン株式会社
撮像装置
7日前
キヤノン株式会社
電子機器
7日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
現像装置
7日前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
現像装置
今日
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
現像装置
今日
キヤノン株式会社
記録装置
2日前
キヤノン株式会社
撮像装置
15日前
キヤノン株式会社
測距装置
22日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
撮像装置
21日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
半導体装置
7日前
キヤノン株式会社
無線送電装置
1日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
8日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像処理装置
1日前
キヤノン株式会社
画像表示装置
21日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
25日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
25日前
キヤノン株式会社
画像形成装置
21日前
キヤノン株式会社
液体吐出装置
7日前
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
1日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ