TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035343
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023142328
出願日
2023-09-01
発明の名称
ピッキングシステム、ピッキングロボット、及びピッキング方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250306BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
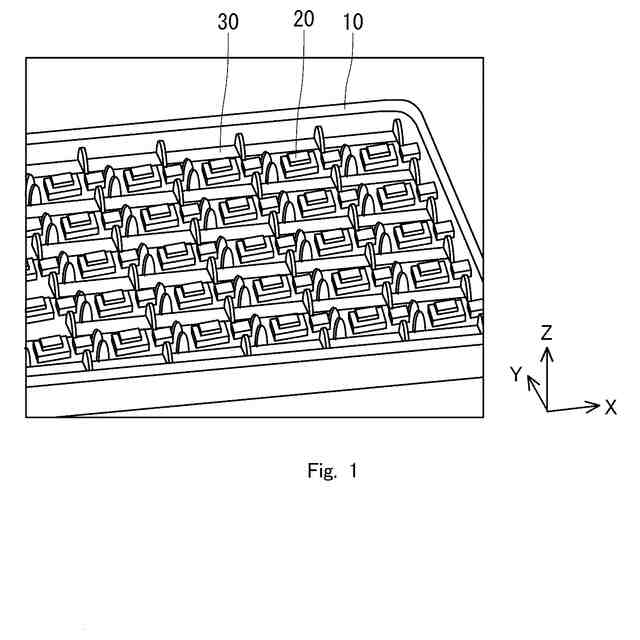
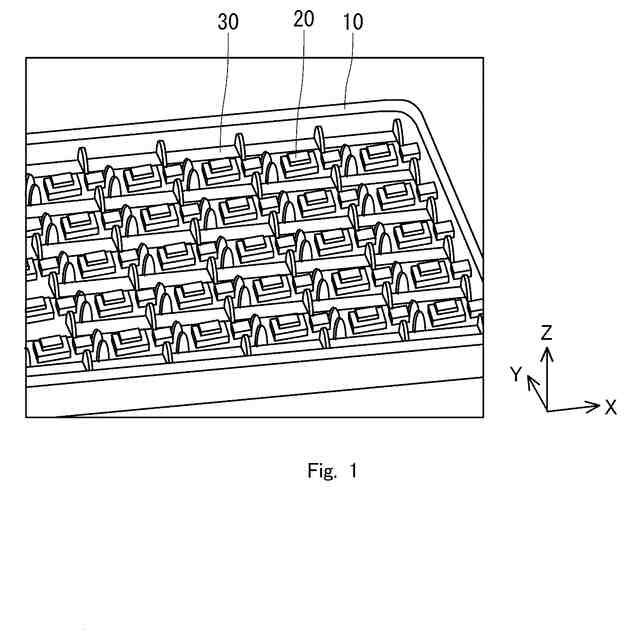
【課題】複数のワークと内材とが載置されたトレイに対してピッキングを行う際に、ワーク検出に要する演算処理にかかる負担を軽減可能なピッキングシステム、ピッキングロボット、及びピッキング方法を提供する。
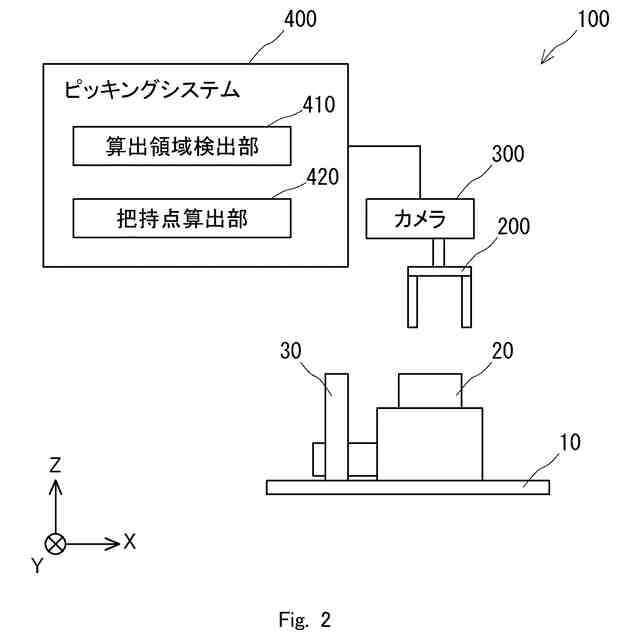
【解決手段】本開示に係るピッキングシステム400は、複数のワーク20のそれぞれが内材30を用いて区切られて載置されたトレイ10を撮影した撮影画像の情報に基づいて、複数のワーク20のそれぞれの位置及び姿勢を検出するピッキングシステムであって、前記撮影画像に対して画像処理を行うことによって複数のワーク20と内材30とを判別し、ワーク20を含む領域を算出領域として検出する、算出領域検出部410と、前記算出領域内に対して、3次元点群データに基づいて複数のワーク20のそれぞれの把持点を算出する、把持点算出部420と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
複数のワークのそれぞれが内材を用いて区切られて載置されたトレイを撮影した撮影画像の情報に基づいて、前記複数のワークのそれぞれの位置及び姿勢を検出するピッキングシステムであって、
前記撮影画像に対して画像処理を行うことによって前記複数のワークと前記内材とを判別し、前記ワークを含む領域を算出領域として検出する、算出領域検出部と、
前記算出領域内に対して、3次元点群データに基づいて前記複数のワークのそれぞれの把持点を算出する、把持点算出部と、を有する、
ピッキングシステム。
続きを表示(約 140 文字)
【請求項2】
請求項1に記載のピッキングシステムを備える、ピッキングロボット。
【請求項3】
請求項1に記載のピッキングシステムを用いて、前記複数のワークと前記内材とが混在する前記トレイから前記複数のワークのそれぞれをピッキングする、ピッキング方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ピッキングシステム、ピッキングロボット、及びピッキング方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、複数のワークが載置されたトレイを撮影した撮影画像に基づいて各ワークを検出してピッキングする技術が開発されている。
例えば、特許文献1には、複数のワークが載置されたトレイを撮影した撮影画像に対してデプスマップに基づいて各ワークを検出し、検出された各ワークをピッキング技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-151699号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
発明者らは、ピッキングシステム、ピッキングロボット、及びピッキング方法に関し、以下の課題を見出した。
複数のワークをトレイに載置すると、輸送時等にワーク同士が衝突する虞がある。そこで、トレイ内を内材で区切り、区切られた各スペースに各ワークを載置し、ワーク同士の衝突等を抑制することがある。トレイ内が内材によって区切られている場合、デプスマップには、各ワークと共に内材が検出される。そのため、検出された各ワーク及び内材のうち各ワークのみを機械学習等によって特定する必要があり、処理が複雑化する。
【0005】
本開示は、このような課題に鑑みなされたものであり、複数のワークと内材とが載置されたトレイに対してピッキングを行う際に、ワーク検出に要する演算処理にかかる負担を軽減可能なピッキングシステム、ピッキングロボット、及びピッキング方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための一態様は、
複数のワークのそれぞれが内材を用いて区切られて載置されたトレイを撮影した撮影画像の情報に基づいて、前記複数のワークのそれぞれの位置及び姿勢を検出するピッキングシステムであって、
前記撮影画像に対して画像処理を行うことによって前記複数のワークと前記内材とを判別し、前記ワークを含む領域を算出領域として検出する、算出領域検出部と、
前記算出領域内に対して、3次元点群データに基づいて前記複数のワークのそれぞれの把持点を算出する、把持点算出部と、を有する。
【発明の効果】
【0007】
本開示によれば、複数のワークと内材とが載置されたトレイに対してピッキングを行う際に、ワーク検出に要する演算処理にかかる負担を軽減可能なピッキングシステム、ピッキングロボット、及びピッキング方法を提供することができる。
【図面の簡単な説明】
【0008】
実施形態1に係るピッキング方法によってピッキングされるトレイの一例を示す図である。
実施形態1に係るピッキングロボットの構成を示す図である。
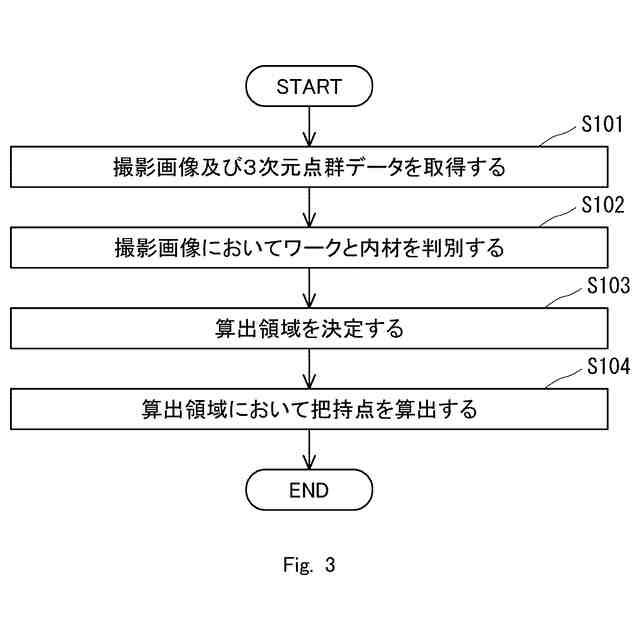
実施形態1に係るピッキング方法の流れを示すフローチャートである。
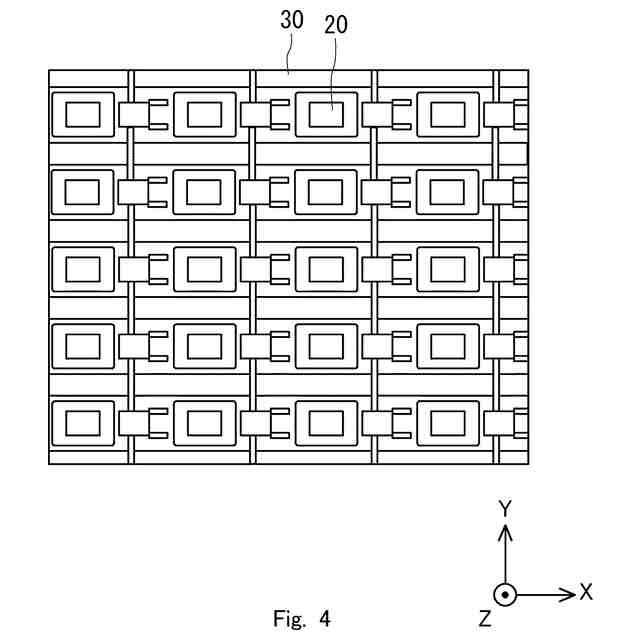
撮影画像の一例を示す図である。
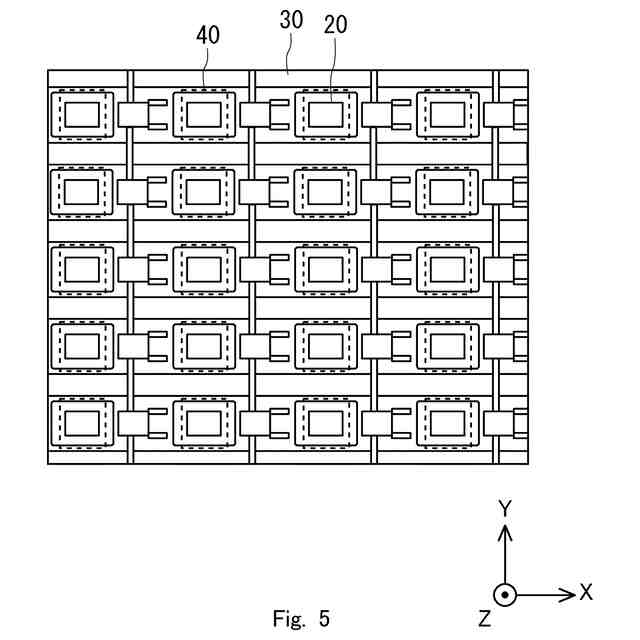
実施形態1に係るピッキング方法において画像処理された撮影画像の一例を示す図である。
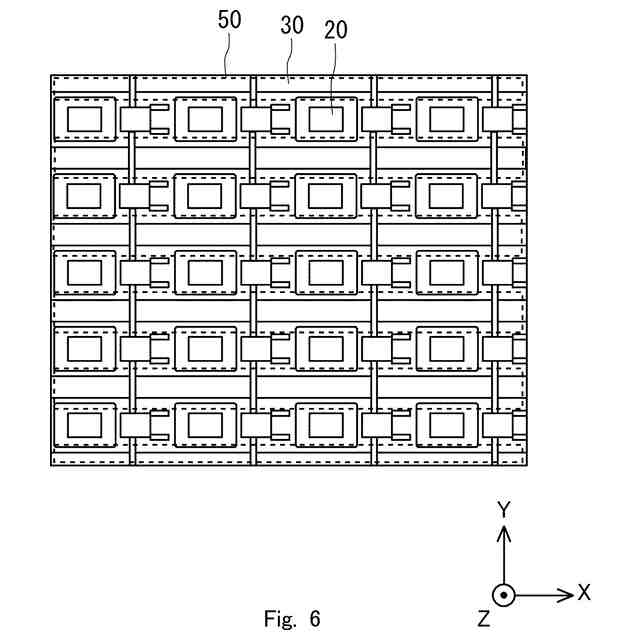
実施形態2に係るピッキング方法において画像処理された撮影画像の一例を示す図である。
【発明を実施するための形態】
【0009】
以下では、本開示の実施形態について、図面を参照しながら詳細に説明する。各図面において、同一又は対応する要素には同一の符号が付されており、説明の明確化のため、必要に応じて重複説明は省略される。
【0010】
なお、当然のことながら、図1及びその他の図面に示した右手系xyz直交座標は、構成要素の位置関係を説明するための便宜的なものである。通常、z軸正方向が鉛直上向きであり、xy平面が水平面であり、図面間で共通である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
27日前
株式会社エビス
連結具
3か月前
株式会社アイセイ
搬送装置
今日
株式会社マキタ
電動工具
3か月前
株式会社マキタ
電動工具
1か月前
国立大学法人金沢大学
ロボット
6日前
株式会社マキタ
電動工具
20日前
株式会社マキタ
打撃工具
3か月前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボットリスト
1か月前
株式会社ケー・エフ・シー
締結構造
10日前
日本車輌製造株式会社
締め付け工具
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
株式会社マキタ
ハンマドリル
3か月前
川崎重工業株式会社
ロボット
2か月前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
日本信号株式会社
作業機制御システム
20日前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
21日前
長堀工業株式会社
締結装置
2か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社スター精機
ワーク搬送装置
24日前
株式会社不二越
ロボットの操作装置
3か月前
株式会社山下工業研究所
ラチェットレンチ
3か月前
トヨタ自動車株式会社
把持装置、把持方法
14日前
アピュアン株式会社
衝撃工具
1日前
株式会社マキタ
集塵アタッチメント
20日前
株式会社アマダ
磁気吸着装置
1か月前
株式会社コスメック
把持装置
7日前
工機ホールディングス株式会社
作業機
3か月前
川崎重工業株式会社
ロボットシステム
27日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































