TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024171841
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023089092
出願日
2023-05-30
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
5/00 20060101AFI20241205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームを動作させる作業と、移動を伴う作業とを含む複数種類の作業を実行する場合における動作の自由度の向上が可能なロボットを提供する。
【解決手段】このロボット100は、ロボットアーム13および14を含むロボット本体部10と、ロボット本体部10と一体的に移動することと、ロボット本体部10とは別個に移動することとを切り替えられて移動する移動部20と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットアームを含むロボット本体部と、
前記ロボット本体部と一体的に移動することと、前記ロボット本体部とは別個に移動することとを切り替えられて移動する移動部と、を備える、ロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記移動部は、前記ロボット本体部とは別個の運搬対象物を載置する載置部を含む、請求項1に記載のロボット。
【請求項3】
前記ロボット本体部に配置され、前記ロボットアームの動作を制御するロボット制御部と、
前記ロボット制御部とは別個に前記移動部に配置され、前記移動部の移動を制御する移動制御部と、をさらに備える、請求項1または2に記載のロボット。
【請求項4】
前記移動部は、前記ロボット本体部と一体的に移動する場合に前記ロボット本体部が取り付けられる基台部を含み、
前記ロボット本体部は、前記移動部の前記基台部に取り付けられる取付部を含む、請求項1または2に記載のロボット。
【請求項5】
前記ロボット本体部は、前記移動部が別個に移動する場合において、前記移動部とは別個に床面に配置された架台部に前記取付部が取り付けられることによって、前記移動部とは別個に固定される、請求項4に記載のロボット。
【請求項6】
前記ロボット本体部は、前記移動部が別個に移動する場合において、前記ロボットアームを動作させることにより、所定の作業動作を行う、請求項1または2に記載のロボット。
【請求項7】
前記ロボットアームは、互いに異なる第1ロボットアームと第2ロボットアームとを有し、
前記第1ロボットアームおよび前記第2ロボットアームの各々は、互いに離間した状態で独立して動作する、請求項1または2に記載のロボット。
【請求項8】
前記移動部は、前記第1ロボットアームおよび前記第2ロボットアームと一体的に移動することと、前記第1ロボットアームおよび前記第2ロボットアームの少なくとも一方とは別個に移動することとを、切り替えられて移動し、
前記移動部が前記第1ロボットアームおよび前記第2ロボットアームの少なくとも一方とは別個に移動している場合において、前記第1ロボットアームおよび前記第2ロボットアームの各々は、互いに独立して動作する、請求項7に記載のロボット。
【請求項9】
前記ロボット本体部に取り付けられた状態と、前記ロボット本体部から離間した状態とを切り替えられて配置され、画像を撮像する本体撮像部をさらに備える、請求項1または2に記載のロボット。
【請求項10】
前記移動部に配置され、前記移動部と一体的に移動する移動撮像部をさらに備える、請求項1または2に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、アーム部を備えた自走式ロボットが開示されている。特許文献1には、走行ベース部とアーム支持部とを備えた自走式ロボットが開示されている。特許文献1の自走式ロボットでは、走行ベース部は、一対の駆動輪を回転駆動して、ロボット本体を走行させる。アーム支持部は、アーム部の端部を支持するとともに、アーム部と一体となって走行ベース部の上段に配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-131377号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載されている自走式ロボットは、アーム部を動作させることにより所定の作業を実行している最中には、作業を行っている地点から離間した地点まで移動することができない。一方で、この自走式ロボットは、運搬、清掃、または、見回りなどの移動を伴う作業を行う場合には、1つの地点において継続してアーム部を動作させる作業を行うことができない。そこで、ロボットアームを動作させる作業と、移動を伴う作業とを含む複数種類の作業を実行する場合における動作の自由度の向上が望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットアームを動作させる作業と、移動を伴う作業とを含む複数種類の作業を実行する場合における動作の自由度の向上が可能なロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面によるロボットは、ロボットアームを含むロボット本体部と、ロボット本体部と一体的に移動することと、ロボット本体部とは別個に移動することとを切り替えられて移動する移動部と、を備える。なお、ここで言う「切り替えられて」とは、移動部がロボット本体部と一体的に移動する状態と、移動部がロボット本体部とは別個に移動する状態とのいずれかの状態を選択的に取ることを意味する。
【0007】
この開示の一の局面によるロボットは、上記のように、ロボット本体部と一体的に移動することと、ロボット本体部とは別個に移動することとを切り替えられて移動する移動部を備える。これにより、ロボット本体部が移動部と一体的に移動する場合には、移動部により移動しながら、複数の地点においてロボット本体部に配置されたロボットアームを用いた作業を行うことができる。また、移動部がロボット本体部と別個に移動する場合には、ロボットアームが作業を行っている最中に移動部が運搬などの移動を伴う作業を行うことができる。これらの結果、ロボットアームを動作させる作業と、移動を伴う作業とを含む複数種類の作業を実行する場合における動作の自由度を向上できる。
【発明の効果】
【0008】
本開示によれば、ロボットアームを動作させる作業と、移動を伴う作業とを含む複数種類の作業を実行する場合における動作の自由度を向上できる。
【図面の簡単な説明】
【0009】
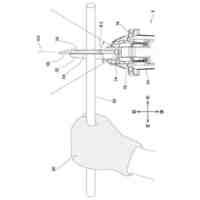
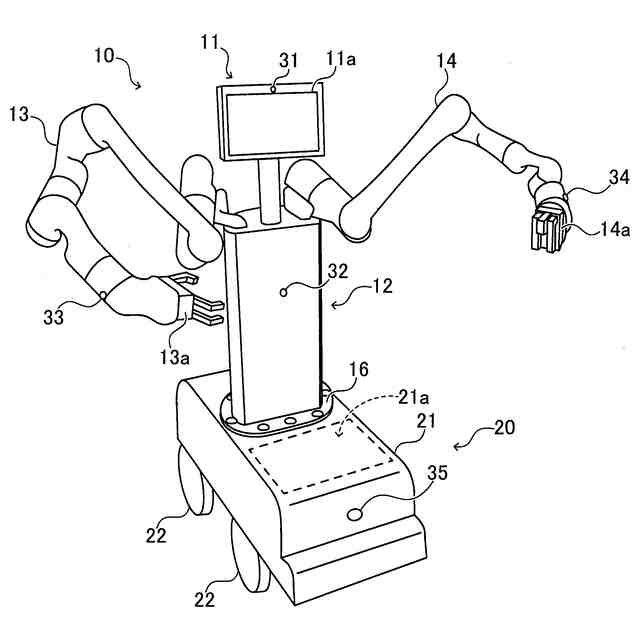
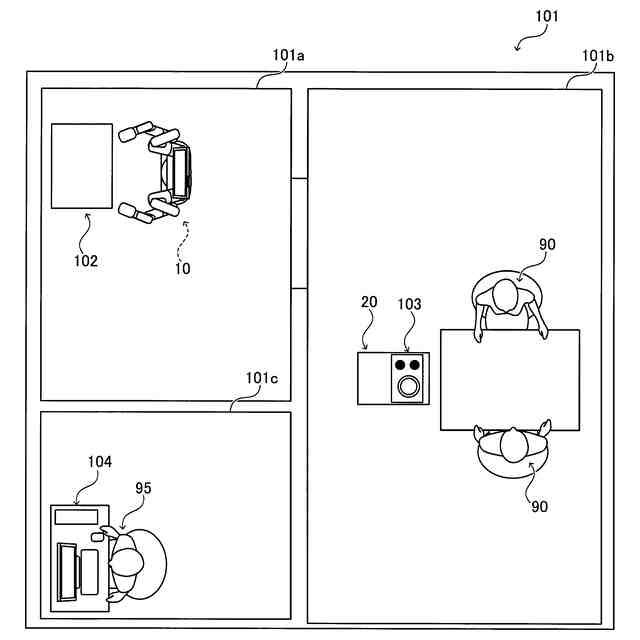
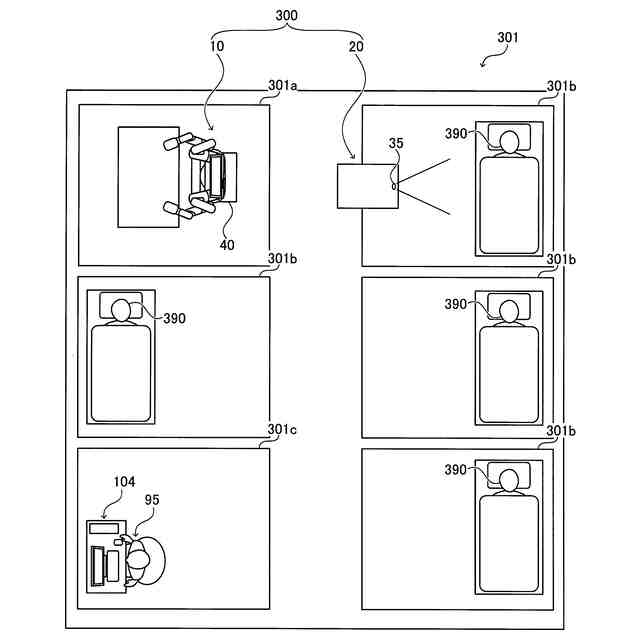
本開示の第1実施形態によるロボットが配置されている配膳システムの全体構成を示す図である。
第1実施形態によるロボットを含む配膳システムの構成を示したブロック図である。
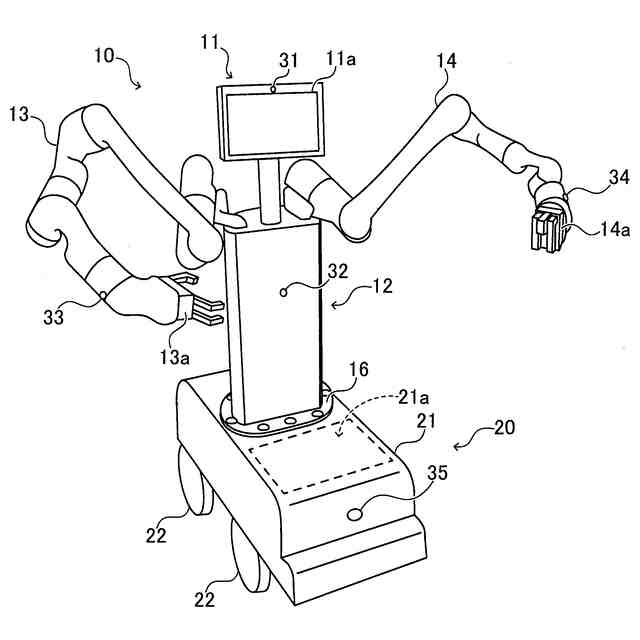
第1実施形態によるロボットの全体構成を模式的に示した斜視図である。
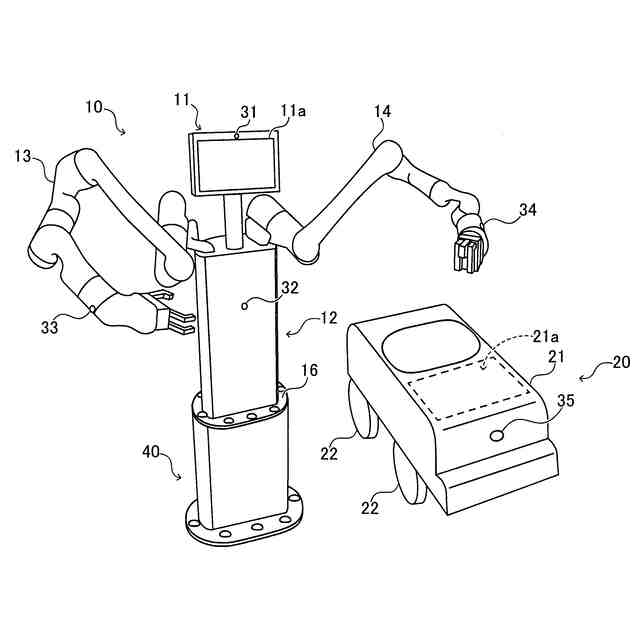
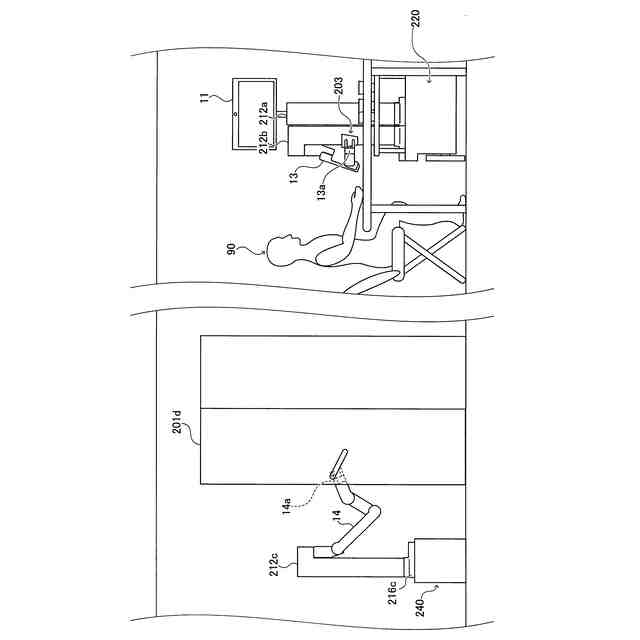
ロボット本体部と移動部とが分離した状態を説明するための図である。
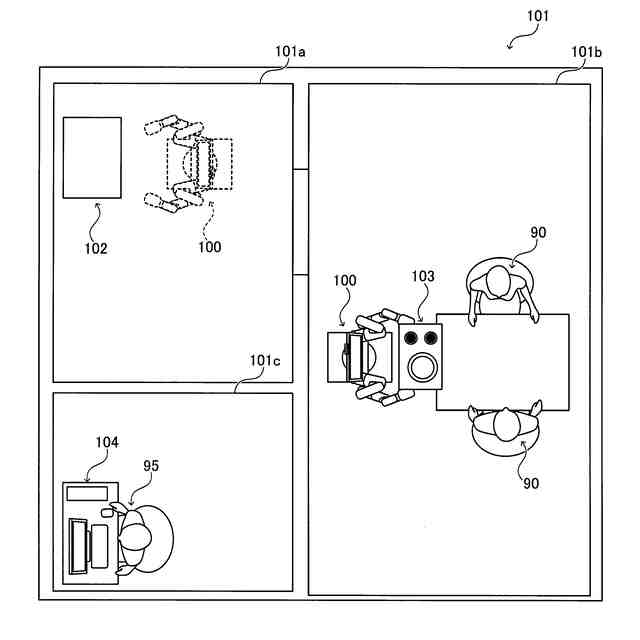
ロボット本体部と移動部とが分離した状態での配膳の動作を示した図である。
頭部が取り外された状態での動作を示した図である。
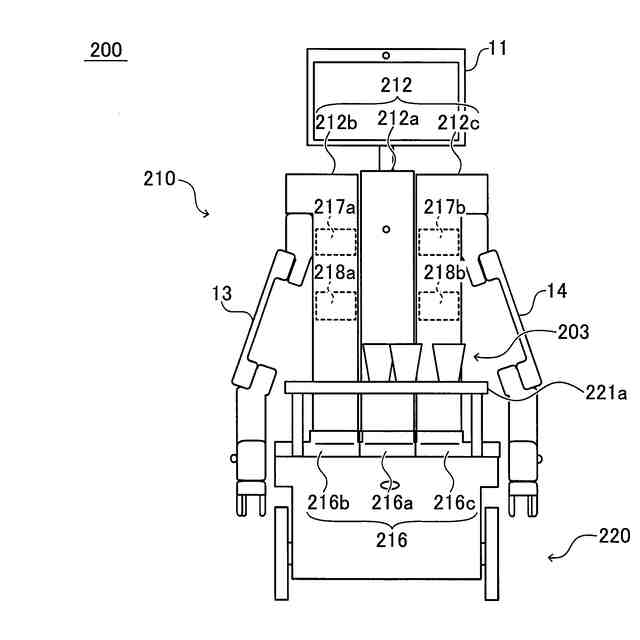
第2実施形態によるロボットの構成を示した模式図である。
ロボットアームが分離した状態での配膳の動作を示した図である。
第3実施形態によるロボットによる見回りの動作を示した図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
13日前
株式会社マキタ
電動工具
6日前
株式会社マキタ
電動工具
21日前
川崎重工業株式会社
ロボットリスト
21日前
川崎重工業株式会社
ロボットアーム
21日前
川崎重工業株式会社
ロボットアーム
21日前
日本車輌製造株式会社
締め付け工具
21日前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
21日前
日本信号株式会社
作業機制御システム
6日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社京阪エンジニアリング
脱着装置
7日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社マキタ
集塵アタッチメント
6日前
株式会社スター精機
ワーク搬送装置
10日前
株式会社アマダ
磁気吸着装置
1か月前
トヨタ自動車株式会社
把持装置、把持方法
今日
川崎重工業株式会社
ロボットシステム
13日前
モトコマ株式会社
寄せポンチホルダー
22日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
21日前
工機ホールディングス株式会社
作業機
1か月前
株式会社DailyColor
ロボットハンド
22日前
有限会社松尾エンジニアリング
連結部材
22日前
個人
ターンバックル用工具
28日前
株式会社SHIN‐JIGEN
上肢アシスト装置
27日前
株式会社マキタ
作業機
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動工具
13日前
株式会社マキタ
往復動工具
1か月前
株式会社マキタ
バッテリ駆動式機器
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ