TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024121732
公報種別
公開特許公報(A)
公開日
2024-09-06
出願番号
2023028990
出願日
2023-02-27
発明の名称
自動ねじ締め装置
出願人
フジセン技工株式会社
代理人
個人
主分類
B25J
15/04 20060101AFI20240830BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
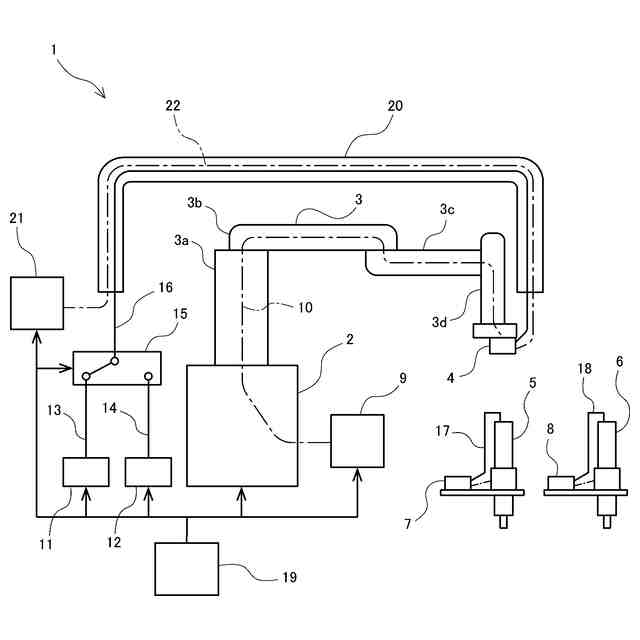
【課題】複数の電動ドライバを交換しながら使用しても電動ドライバの配線及び配管がロボットの稼働の妨げにならず、ねじ締め作業を効率良く安全に実行することができる自動ねじ締め装置を提供する。
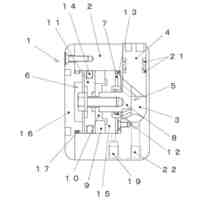
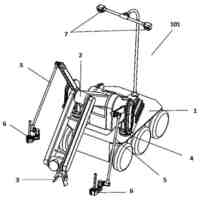
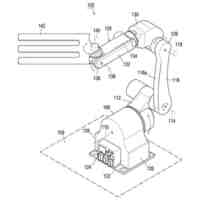
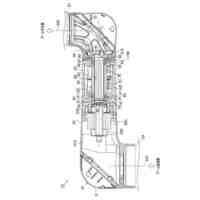
【解決手段】ロボットアーム3で保持された電動ドライバ5、6を用いてねじ締めを行う自動ねじ締め装置であって、ツールチェンジャ4、7、8を介してロボットアームに選択的に連結される複数の電動ドライバと、複数の電動ドライバをそれぞれ作動させる複数の制御装置11、12と、を備え、複数の制御装置と複数の電動ドライバとは、共通ケーブル16と、共通ケーブルと制御装置との接続を選択的に切り替える切替手段15と、を介して選択的に接続される。これにより、複数の電動ドライバを交換しながら使用する場合でも、配線等が邪魔にならず、ねじ締め作業を効率良く安全に実行することができる。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームによって保持された電動ドライバを用いてねじ締めを行う自動ねじ締め装置であって、
ツールチェンジャを介して前記ロボットアームに選択的に連結される複数の前記電動ドライバと、
複数の前記電動ドライバをそれぞれ作動させる複数の制御装置と、を備え、
複数の前記制御装置と複数の前記電動ドライバとは、共通ケーブルと、前記共通ケーブルと前記制御装置との接続を選択的に切り替える切替手段と、を介して選択的に接続されることを特徴とする自動ねじ締め装置。
続きを表示(約 250 文字)
【請求項2】
前記共通ケーブルは、前記ロボットアームに沿って配線されていることを特徴とする請求項1に記載の自動ねじ締め装置。
【請求項3】
前記共通ケーブルは、導電材料を含む合成樹脂製の保護チューブで被覆されていることを特徴とする請求項1または請求項2に記載の自動ねじ締め装置。
【請求項4】
前記共通ケーブルには、複数の前記電動ドライバで使用されるエアを供給するエア配管が付設されていることを特徴とする請求項1または請求項2に記載の自動ねじ締め装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットを用いて機械部品等のねじ締め作業を自動的に行う自動ねじ締め装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、産業用ロボットのロボットアーム先端で電動ドライバを保持して、ねじ締結作業を自動で行うことが知られている。
【0003】
例えば、特許文献1、特許文献2及び特許文献3には、ロボットのロボットアームに電動ドライバを保持させ、機械部品等のねじ締め作業がロボットを用いて自動的に行われるようにした自動ねじ締め装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2012-161860号公報
特開2013-31900号公報
特開2010-264514号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記したロボットを用いて機械部品等のねじ締め作業を自動的に行うようにした自動ねじ締め装置は、製造現場における自動組み立てに有効な装置である。このような自動ねじ締め装置の利用により、製造工程における省力化と作業の効率化が図れるばかりでなく、高精度にトルク管理されたねじ締め作業により締め付けトルクの均一化を図ることができ、品質向上にもつながる利点がある。
【0006】
ところで、この種の自動ねじ締め装置では、締め付けトルク等が異なる複数の電動ドライバを用いてねじ締め作業を行う場合、ツールチェンジャを介してロボットアームに複数の電動ドライバを選択的に連結させることが必要である。
【0007】
具体的には、複数の電動ドライバに対応する複数の制御装置を設ける必要があり、選択された電動ドライバをその電動ドライバに対応する制御装置に接続することによって電動ドライバを所定のトルクで作動させることができる。
【0008】
そのため、上記した従来技術の自動ねじ締め装置では、複数の制御装置と複数の電動ドライバとをそれぞれ接続する複数のケーブルを配線することになり、ロボットが稼働する際にケーブル同士が絡む恐れがあった。また、多数のケーブルがロボットアームに接触してロボットアームの動作を阻害する恐れや、ケーブルが作業者に接触する等の安全性の問題点もあった。
【0009】
このケーブル同士の絡みや、ケーブルとロボットアーム等との接触等を防止するために、例えば、複数のケーブルを上方から垂らして引き回せるようにする配線方式がある。しかしながら、ケーブルを上方から吊り下げる構成では、交換する電動ドライバの数が多くなるほど、ケーブルを吊持する支柱等の設置やケーブルを吊持させる施工が容易ではない。また、ケーブルの数が多くなると、ケーブルに占有される領域が広くなり作業者が安全に作業できる領域が狭くなるという問題点があった。
【0010】
また、電動ドライバにねじを真空吸着させるためにエア配管を施すことがあり、複数の電動ドライバを使用する場合には、ケーブルと共に真空吸着用のエア配管も複数必要になるという問題点があった。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エビス
連結具
1か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社エビス
携帯付属物取付具
2か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社ダイヘン
制御装置
2か月前
株式会社ダイヘン
搬送装置
3か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
1か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボット
1か月前
株式会社マキタ
ハンマドリル
1か月前
CKD株式会社
吸着型搬送装置
5日前
株式会社近藤製作所
産業用ロボットチャック
3か月前
学校法人立命館
ロボットハンド
2か月前
株式会社安川電機
ロボット
8日前
白山工業株式会社
遠隔操作ロボット機構
3か月前
株式会社アイエイアイ
グリッパー
2か月前
長堀工業株式会社
締結装置
21日前
トヨタ自動車株式会社
ロボットチャック
3か月前
ジヤトコ株式会社
圧入装置
4日前
株式会社安川電機
ロボット
8日前
株式会社安川電機
ロボット
8日前
川崎重工業株式会社
塗装ロボット
12日前
株式会社不二越
垂直多関節ロボット
3か月前
株式会社やまびこ
電動作業機
4か月前
株式会社アマダ
磁気吸着装置
11日前
株式会社不二越
ロボットの操作装置
1か月前
中国電力株式会社
ボルト共回り防止用工具
3か月前
株式会社デンソーウェーブ
産業用ロボット
3か月前
株式会社やまびこ
電動作業機
4か月前
株式会社山下工業研究所
ラチェットレンチ
1か月前
日本精工株式会社
回転駆動力伝達機構
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ