TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024128873
公報種別
公開特許公報(A)
公開日
2024-09-24
出願番号
2023038140
出願日
2023-03-10
発明の名称
電動作業機
出願人
株式会社やまびこ
代理人
弁理士法人IPX
主分類
B25F
5/02 20060101AFI20240913BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】より筐体が小型化された電動作業機を提供する。
【解決手段】本発明の一態様によれば、作業対象を切断するための手持ち式の電動作業機が提供される。この電動作業機は、作業部と、筐体と、モータと、制御ユニットとを備える。作業部は、作業対象を切断するよう、構成される。筐体は、ユーザが位置する後方側から作業対象が位置する前方側への第1の方向に延在する。モータは、作業部を駆動させるための回転動力を発生させるように構成される。筐体の後方側において、筐体の中心線よりも第2の方向に偏位して設けられる。中心線は、第1の方向に延在し、第2の方向は、第1の方向に垂直な方向である。制御ユニットは、モータの回転を電気的に制御するように構成される。中心線を挟んでモータに対向する位置に設けられる。
【選択図】図1
特許請求の範囲
【請求項1】
作業対象を切断するための手持ち式の電動作業機であって、
作業部と、筐体と、モータと、制御ユニットとを備え、
前記作業部は、前記作業対象を切断するよう、構成され、
前記筐体は、ユーザが位置する後方側から前記作業対象が位置する前方側への第1の方向に延在し、
前記モータは、
作業部を駆動させるための回転動力を発生させるように構成され、
前記筐体の前記後方側において、前記筐体の中心線よりも第2の方向に偏位して設けられ、ここで、前記中心線は、前記第1の方向に延在し、前記第2の方向は、前記第1の方向に垂直な方向であり、
前記制御ユニットは、
前記モータの回転を電気的に制御するように構成され、
前記中心線を挟んで前記モータに対向する位置に設けられる、電動作業機。
続きを表示(約 540 文字)
【請求項2】
請求項1に記載の電動作業機において、
前記筐体は、前記第2の方向に所定幅を有し、
前記モータと前記制御ユニットとは、前記所定幅を超えないようにそれぞれ設けられる、電動作業機。
【請求項3】
請求項1に記載の電動作業機において、
前記モータは、第1の角度が15度から45度までの何れかの角度となるように設けられ、ここで前記第1の角度は、前記モータの回転する軸の中心と前記中心線上にある所定位置とを結ぶ線と、前記中心線とでなされる鋭角である、電動作業機。
【請求項4】
請求項1に記載の電動作業機において、
前記制御ユニットは、第2の角度が15度から45度までの何れかの角度となるように設けられ、ここで前記第2の角度は、その長手方向に沿った線と、前記中心線とでなされる鋭角である、電動作業機。
【請求項5】
請求項4に記載の電動作業機において、
前記制御ユニットは、前記第2の角度が前記第1の角度より小さな角度となるように設けられる、電動作業機。
【請求項6】
請求項1に記載の電動作業機において、
ヘッジトリマー、刈払機又はチェーンソーである、電動作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動作業機に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来技術として、下記の文献が挙げられる。
【先行技術文献】
【特許文献】
【0003】
特開2022-53268号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に開示される従来技術は、筐体の小型化が十分でない。
【0005】
本発明では上記事情に鑑み、より筐体が小型化された電動作業機を提供することとした。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、作業対象を切断するための手持ち式の電動作業機が提供される。この電動作業機は、作業部と、筐体と、モータと、制御ユニットとを備える。作業部は、作業対象を切断するよう、構成される。筐体は、ユーザが位置する後方側から作業対象が位置する前方側への第1の方向に延在する。モータは、作業部を駆動させるための回転動力を発生させるように構成される。筐体の後方側において、筐体の中心線よりも第2の方向に偏位して設けられる。中心線は、第1の方向に延在し、第2の方向は、第1の方向に垂直な方向である。制御ユニットは、モータの回転を電気的に制御するように構成される。中心線を挟んでモータに対向する位置に設けられる。
【0007】
このような態様によれば、筐体の小型化をすることができる。
【図面の簡単な説明】
【0008】
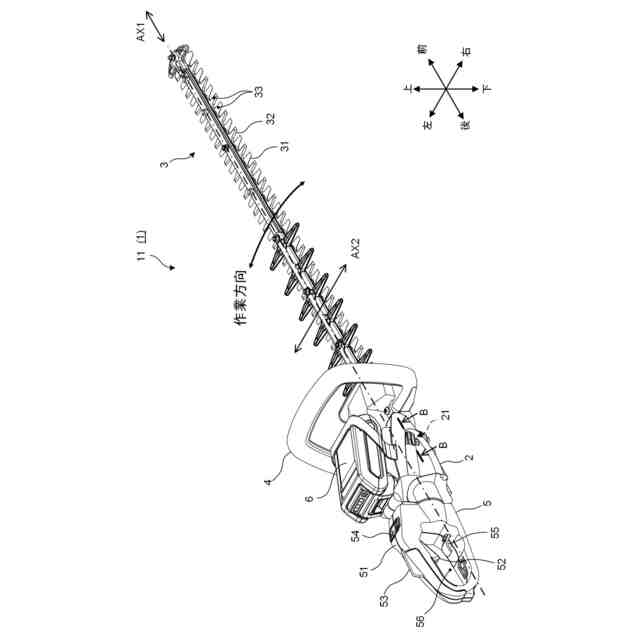
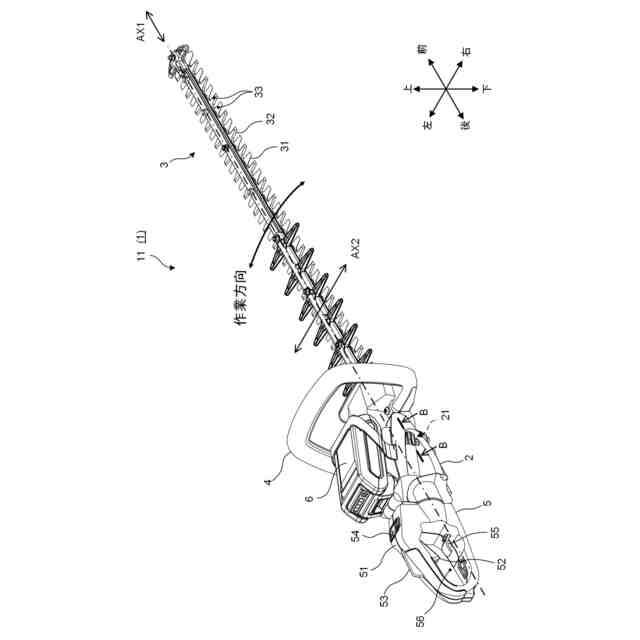
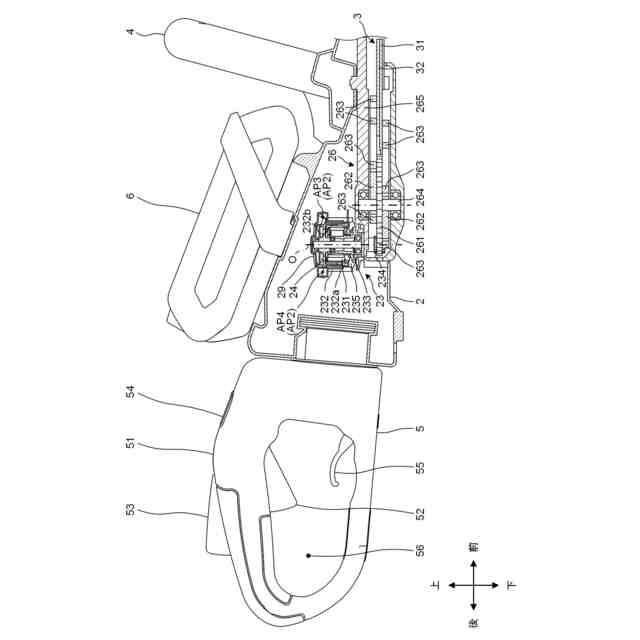
ヘッジトリマー11を上側から見た全体斜視図である。
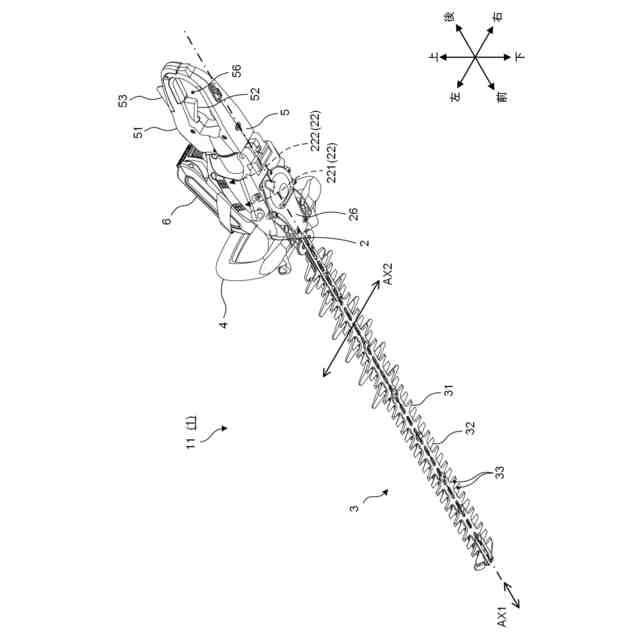
ヘッジトリマー11を下側から見た全体斜視図である。
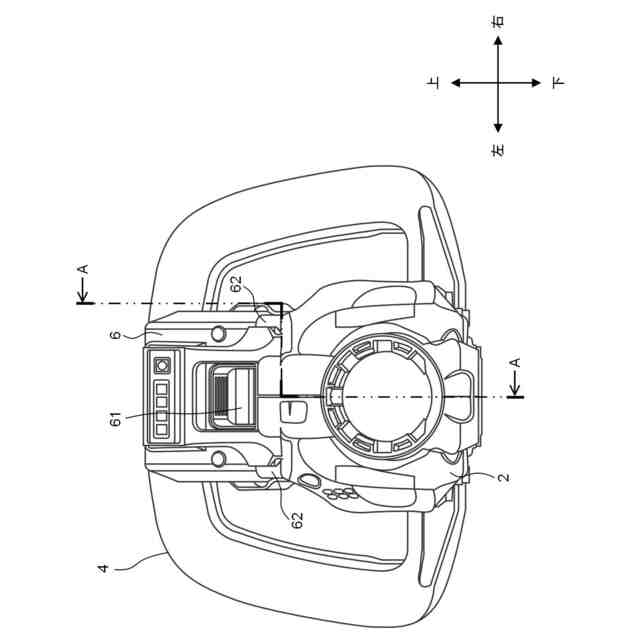
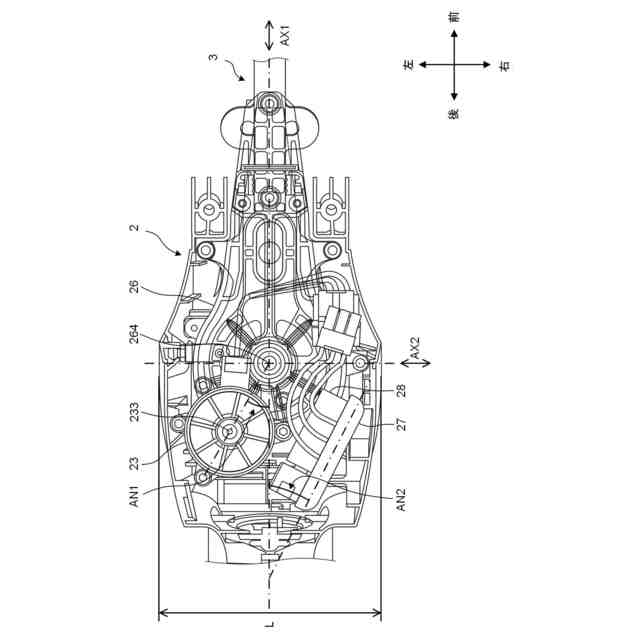
後ハンドル5を取り外した状態のヘッジトリマー11を後側から見た図である。
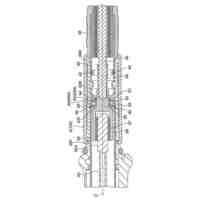
図3に示すA-A断面で表した状態の筐体2及びモータ23の回転中心Oに沿って断面で表した状態のモータ23を左側から見た図である。
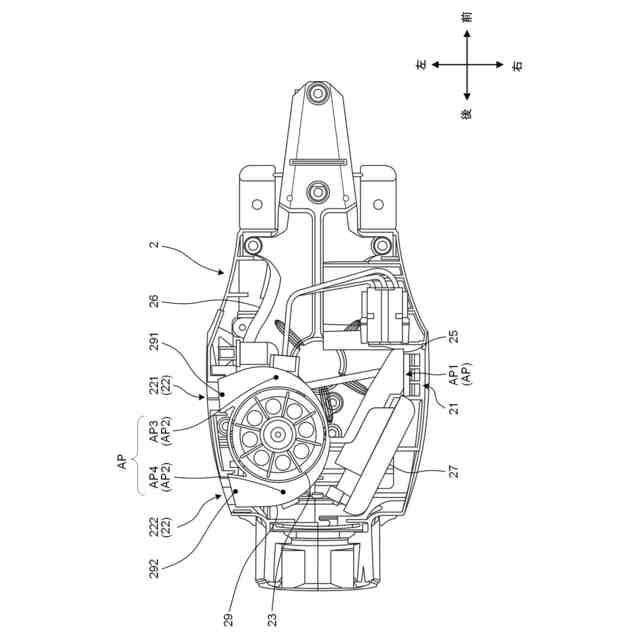
筐体2の一部を取り外し又は断面にした状態の筐体2を上側から見た図である。
筐体2の一部を取り外した状態の筐体2を上側から見た図である。
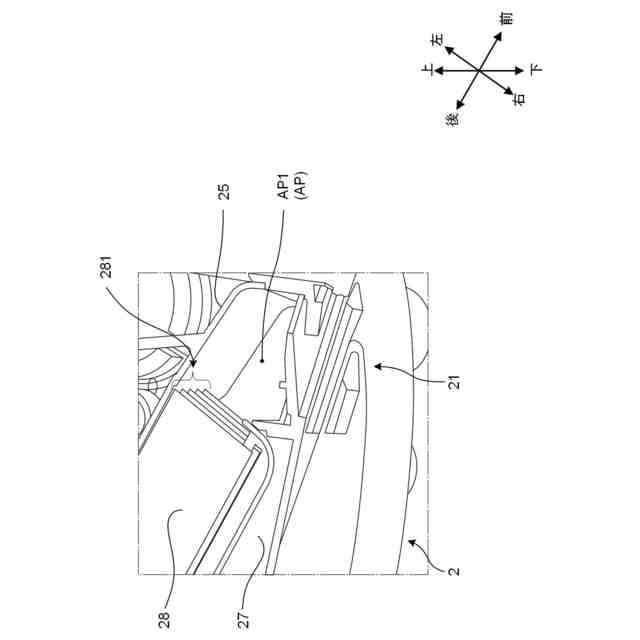
図1に示すB-B断面で表した状態の筐体2を上側から見た、第1の空気流路AP1を説明するための図である。
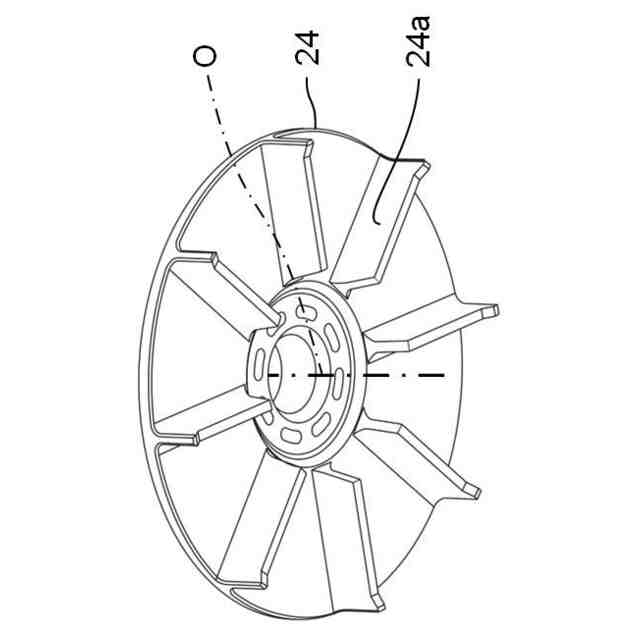
ファン24を下側から見た全体斜視図である。
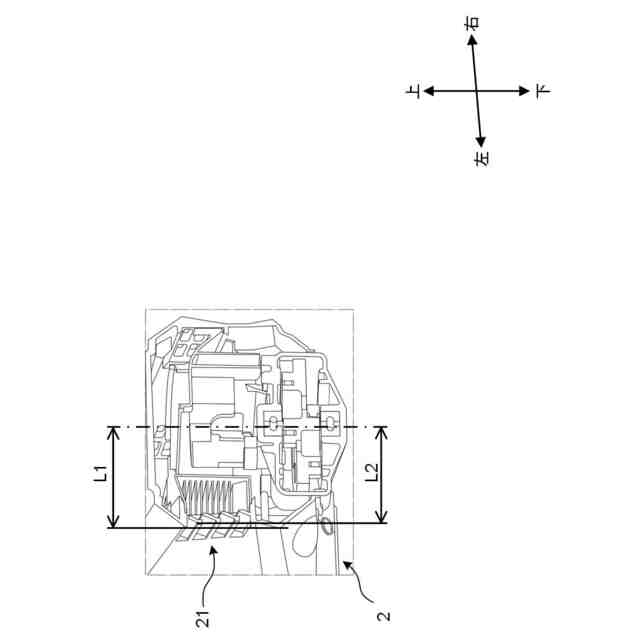
筐体2の一部を断面にした状態の吸気口21を説明するための図である。
筐体2の一部を断面にした状態の排気口22及び第2の空気流路AP2を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態の一例について、図を参照しながら説明する。
【0010】
1.全体構成
第1章では、本実施形態に係る電動作業機1について説明する。電動作業機1は、作業対象を切断するための手持ち式の電動作業機である。また、好ましくは、電動作業機1は、ヘッジトリマー11、刈払機(不図示)又はチェーンソー(不図示)である。このような態様によれば、小型化されたヘッジトリマー11、刈払機又はチェーンソーを用いて、作業対象を切断することができる。以下ヘッジトリマー11(電動作業機1)を例に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社やまびこ
背負式動力作業機
1か月前
株式会社やまびこ
エンジン制御装置およびエンジン制御方法
2日前
株式会社やまびこ
操作桿付き作業機及び肩掛けベルト用の吊り具
9日前
株式会社やまびこ
2ストロークエンジン
2日前
個人
木製ハンマー
2か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
2か月前
コクヨ株式会社
補助器具
2か月前
太陽工業株式会社
チャック装置
1か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
個人
メンテナンス用スタンド
4か月前
株式会社マキタ
打撃工具
9日前
オムロン株式会社
電動把持工具
2か月前
東京計器株式会社
接触検知装置
3か月前
学校法人立命館
グリッパ
2か月前
CKD株式会社
把持装置
2か月前
トヨタ自動車株式会社
ロボット
3か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
白山工業株式会社
ロボットアーム
2か月前
株式会社エビス
携帯付属物取付具
9日前
株式会社ハーモ
開閉チャック装置
3か月前
株式会社マキタ
電動ハンマ
23日前
株式会社ダイヘン
搬送装置
9日前
株式会社ダイヘン
搬送装置
1か月前
個人
回転工具およびバリ取り部品
3か月前
株式会社ダイヘン
制御装置
17日前
株式会社大林組
ロッカー装置
3か月前
株式会社スター精機
把持装置
1か月前
トヨタ自動車株式会社
締付判定方法
3か月前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
17日前
国立大学法人佐賀大学
協働システム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ