TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024104305
公報種別
公開特許公報(A)
公開日
2024-08-05
出願番号
2021096598
出願日
2021-06-09
発明の名称
接触検知装置
出願人
東京計器株式会社
代理人
個人
主分類
B25J
19/06 20060101AFI20240729BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】より低コストで被駆動部材と対象物との接触を検知する接触検知装置を提供する。
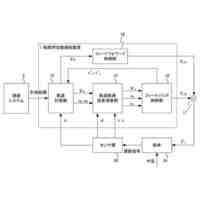
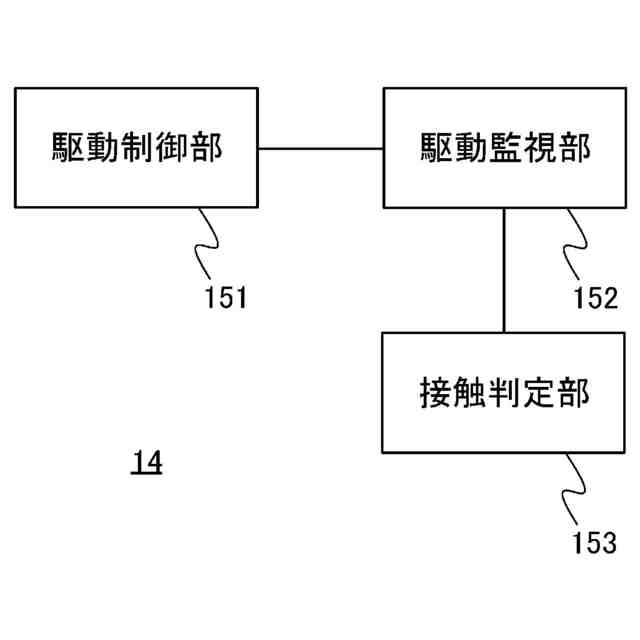
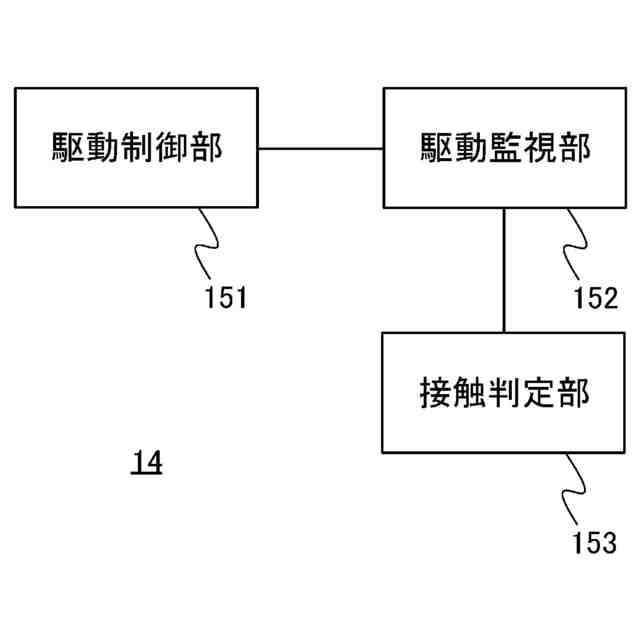
【解決手段】回転力を発生させる回転駆動部により回転可能または揺動可能に設けられた被駆動部材による対象物への接触を検知する接触検知装置14であって、回転駆動部を所定のトルクにより回転駆動させる駆動制御部151と、回転センサにより測定された回転駆動部の回転角度を周期的に取得する駆動監視部152と、取得された回転角度に基づく回転角度の変化がゼロである場合、被駆動部材が対象物に接触したと判定する接触判定部153とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
回転力を発生させる回転駆動部により回転可能または揺動可能に設けられた被駆動部材による対象物への接触を検知する接触検知装置であって、
前記回転駆動部を所定のトルクにより回転駆動させる駆動制御部と、
回転センサにより測定された前記回転駆動部の回転角度を周期的に取得する駆動監視部と、
前記取得された回転角度に基づく回転角度の変化がゼロである場合、前記被駆動部材が前記対象物に接触したと判定する接触判定部と
を備える接触検知装置。
続きを表示(約 160 文字)
【請求項2】
前記被駆動部材は、略円形に形成され、前記回転駆動部により円中心周りに回転されることを特徴とする請求項1に記載の接触検知装置。
【請求項3】
前記被駆動部材は、一方向に延在するように形成され、前記回転駆動部により一端部を支点として揺動されることを特徴とする請求項1に記載の接触検知装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、接触を検知する技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、モータにより駆動される被駆動部材の対象物への接触検知は、接触センサ、トルクセンサ、電流検出などによりなされていた。接触センサは被駆動部材において対象物との接触により生じる物理的変位を検知することにより接触を検知する。トルクセンサは、モータにおけるトルクの増加を検出することにより接触を検知する。電流検出は、モータにおける電流の増加を検出することにより接触を検知する。
【0003】
また、関連する技術として、基台の上部に3軸以上の多関節を有するロボットの外部接触2重チェック装置において、ロボットと外部との接触を検知する相互に独立した第1検知手段及び、第2検知手段の2つの検知手段を有し、第1検知手段は多関節のうち第1軸と第2軸と第3軸に設けた3つのトルクセンサによる第1系統であり、第2検知手段は基台の設置部に設けた3自由度力トルクセンサによる第2系統であり、第1検知手段及び第2検知手段から得られる検知信号により、ロボットを安全に制御することを特徴とするロボットの外部接触2重チェック装置、が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2019-42906号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
接触センサ、トルクセンサ、電流検出のそれぞれによる接触検知によれば、被駆動部材またはモータに対して追加の専用部品や専用回路が必要となるため、コストが増大する、という問題がある。
【0006】
本発明の実施形態は、より低コストで被駆動部材と対象物との接触を検知する接触検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決するため、本実施形態に係る接触検知装置は、回転力を発生させる回転駆動部により回転可能または揺動可能に設けられた被駆動部材による対象物への接触を検知する接触検知装置であって、前記回転駆動部を所定のトルクにより回転駆動させる駆動制御部と、回転センサにより測定された前記回転駆動部の回転角度を周期的に取得する駆動監視部と、前記取得された回転角度に基づく回転角度の変化がゼロである場合、前記被駆動部材が前記対象物に接触したと判定する接触判定部とを備える。
【発明の効果】
【0008】
本発明の実施形態によれば、より低コストで被駆動部材と対象物との接触を検知することができる。
【図面の簡単な説明】
【0009】
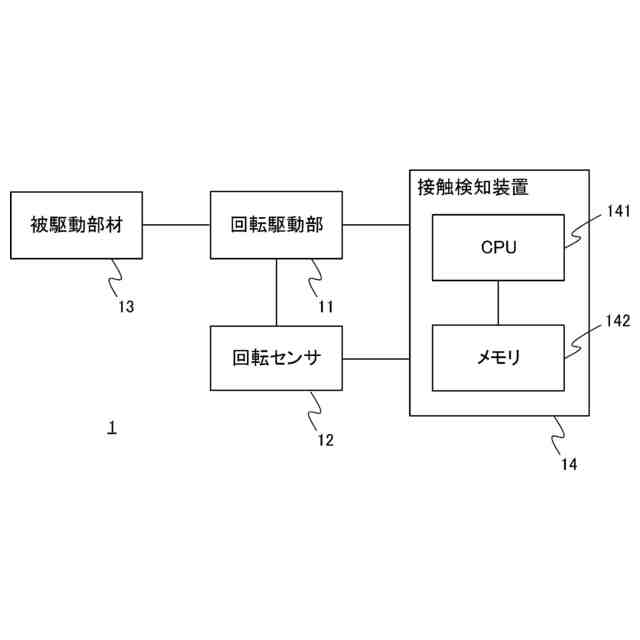
実施形態に係る接触検知システムのハードウェア構成を示すブロック図である。
接触検知装置の機能構成を示すブロック図である。
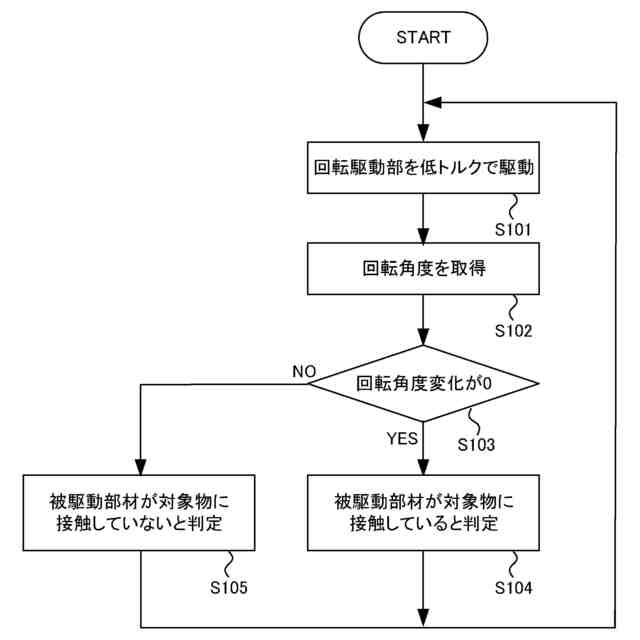
接触検知装置の動作を示すフローチャートである。
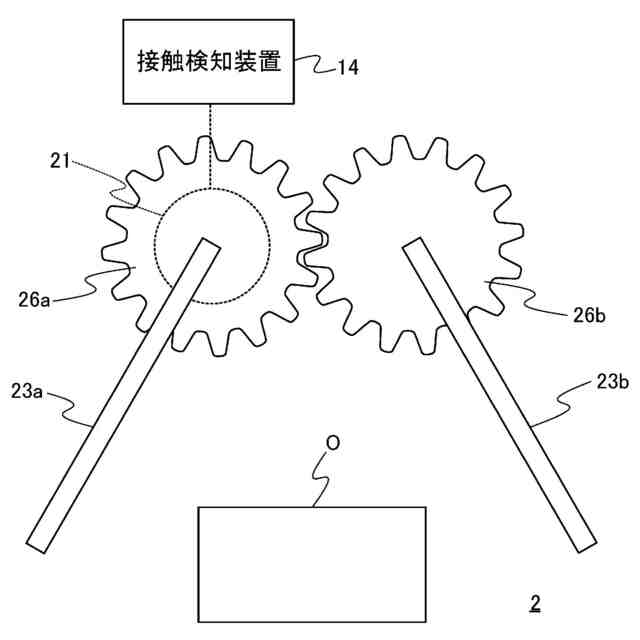
接触検知装置を適用したロボットハンドを示す概略図である。
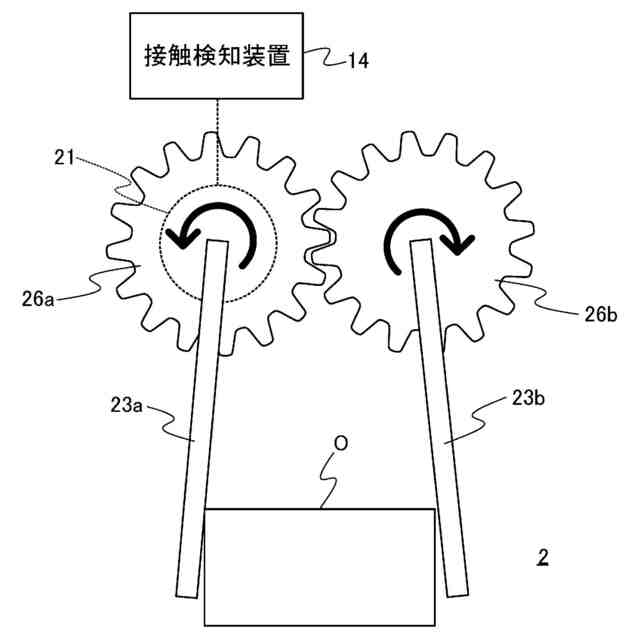
接触が検知された状態におけるロボットハンドを示す概略図である。
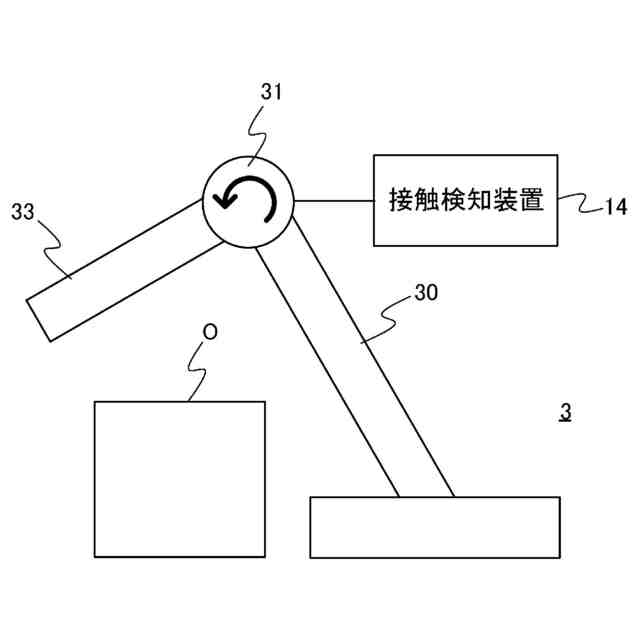
接触検知装置を適用したロボットアームを示す概略図である。
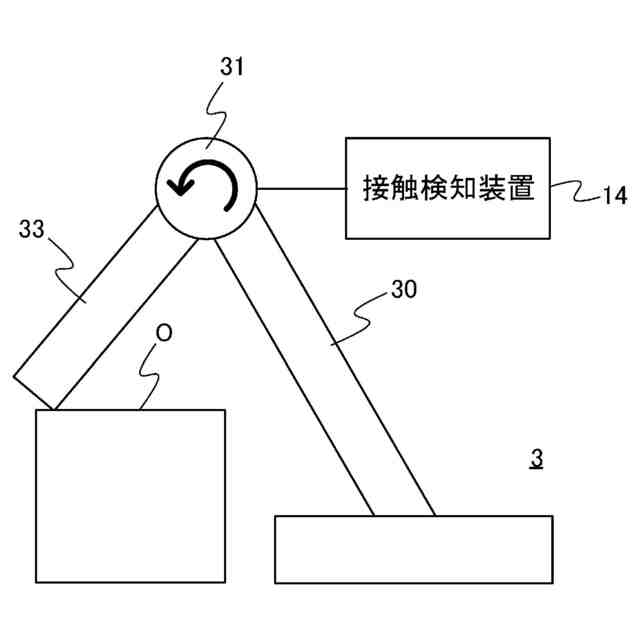
接触が検知された状態におけるロボットアームを示す概略図である。
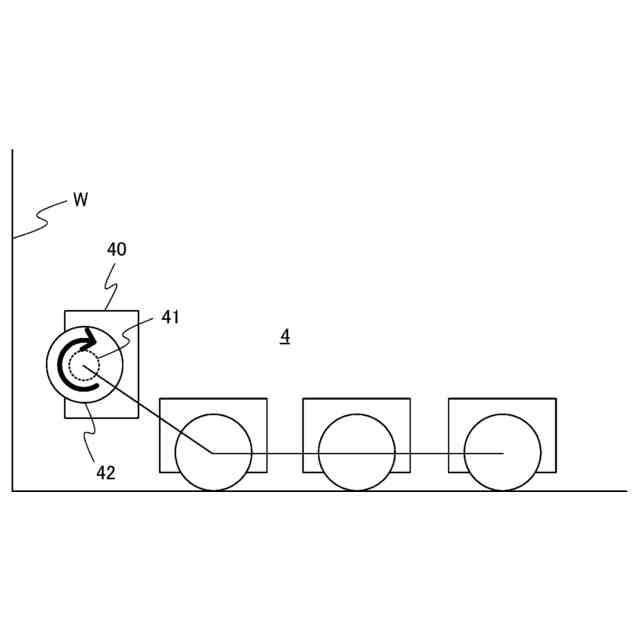
接触検知装置を適用した多車両連結ロボットを示す概略図である。
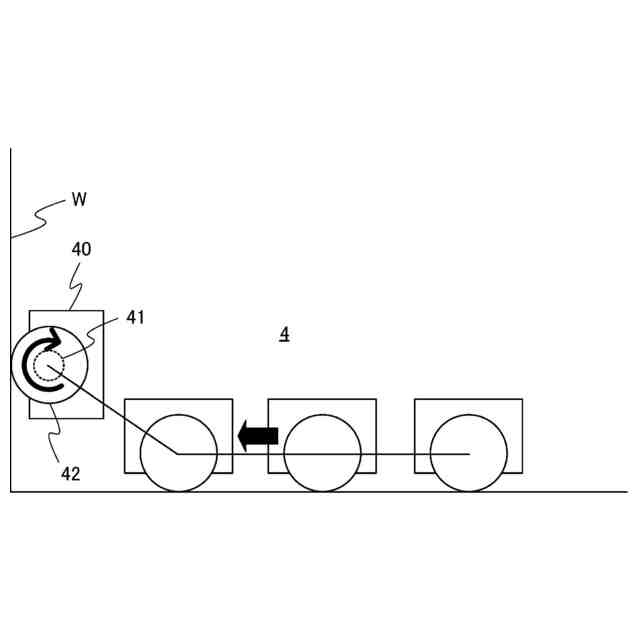
接触が検知された状態における多車両連結ロボットを示す概略図である。
【発明を実施するための形態】
【0010】
以下、図面を参照しながら、本発明の実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東京計器株式会社
船舶用自動操舵装置
29日前
OMC株式会社
ロボット
9日前
株式会社クレスコ
補助吸着具
2日前
個人
けがき用治具
1か月前
株式会社不二越
ロボット
1か月前
株式会社不二越
ロボット操作装置
29日前
株式会社エビス
腰ベルト用連結具
9日前
個人
深孔スリーブ駆動ロッド構造
22日前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
17日前
個人
バール
22日前
株式会社デンソー
操縦桿
1か月前
株式会社黒澤鉄工製作所
けがき用治具
1か月前
梅馨堂合同会社
人協働ロボットシステム
24日前
ARMA株式会社
UI付エンドエフェクタ
25日前
株式会社デンソーウェーブ
ロボット制御システム
15日前
株式会社マキタ
作業機
29日前
学校法人法政大学
装着型アシスト装置
19日前
アピュアン株式会社
エアー式衝撃工具
12日前
若井ホールディングス株式会社
レンチ構造とその製造方法
1か月前
三菱電機株式会社
トルク締め個所検出システム
22日前
株式会社マキタ
インパクト工具
10日前
株式会社マキタ
インパクト工具
10日前
高丸工業株式会社
ロボット操作システムの動作方法
22日前
シブヤパッケージングシステム株式会社
物品移載装置
1か月前
中国電力株式会社
電動ドライバー
16日前
株式会社不二越
ロボットの教示システム及び教示方法
16日前
SB C&S株式会社
治具セット
9日前
JUKI株式会社
ハンドリング装置
24日前
株式会社ベッセル工業
インパクト工具
1か月前
株式会社デンソー
解体装置および解体プログラム
1か月前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
12日前
オムロン株式会社
モバイルロボット
16日前
株式会社デンソー
作業装置および作業プログラム
1か月前
オムロン株式会社
モバイルロボット
16日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ